
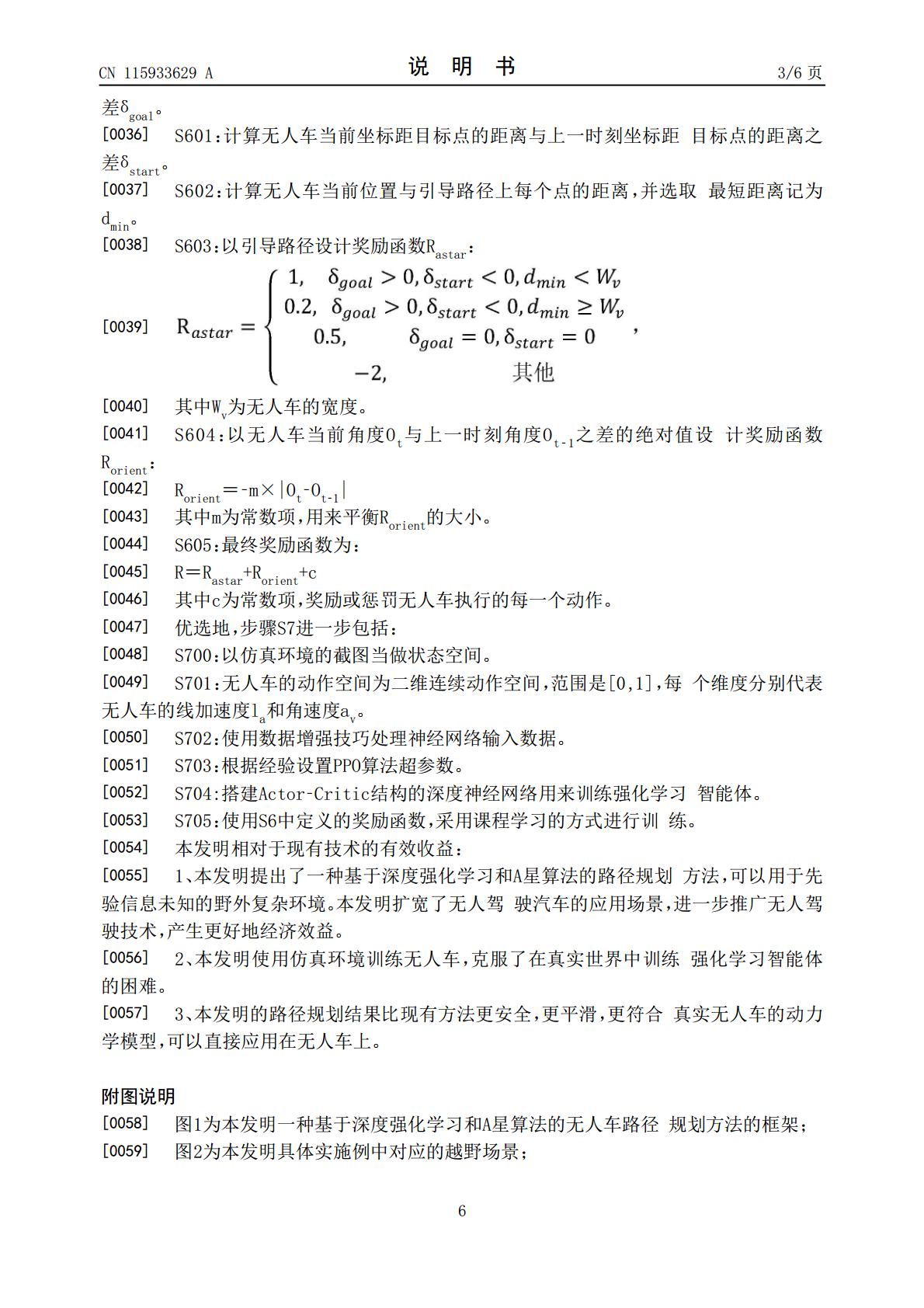
一种基于深度强化学习和A星算法的无人车路径规划方法.pdf

猫巷****觅蓉

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度强化学习和A星算法的无人车路径规划方法.pdf
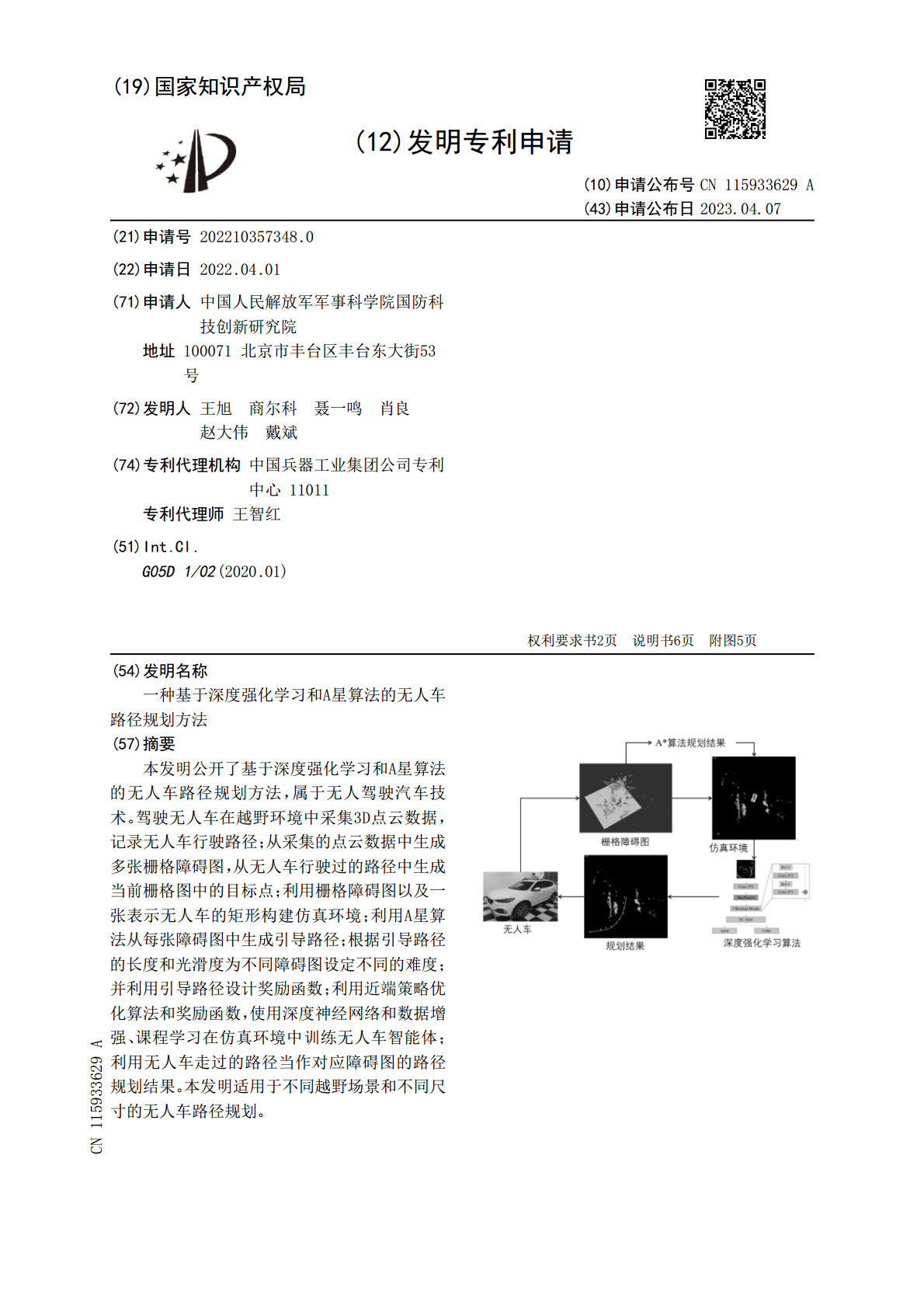
本发明公开了基于深度强化学习和A星算法的无人车路径规划方法,属于无人驾驶汽车技术。驾驶无人车在越野环境中采集3D点云数据,记录无人车行驶路径;从采集的点云数据中生成多张栅格障碍图,从无人车行驶过的路径中生成当前栅格图中的目标点;利用栅格障碍图以及一张表示无人车的矩形构建仿真环境;利用A星算法从每张障碍图中生成引导路径;根据引导路径的长度和光滑度为不同障碍图设定不同的难度;并利用引导路径设计奖励函数;利用近端策略优化算法和奖励函数,使用深度神经网络和数据增强、课程学习在仿真环境中训练无人车智能体;利用无人车
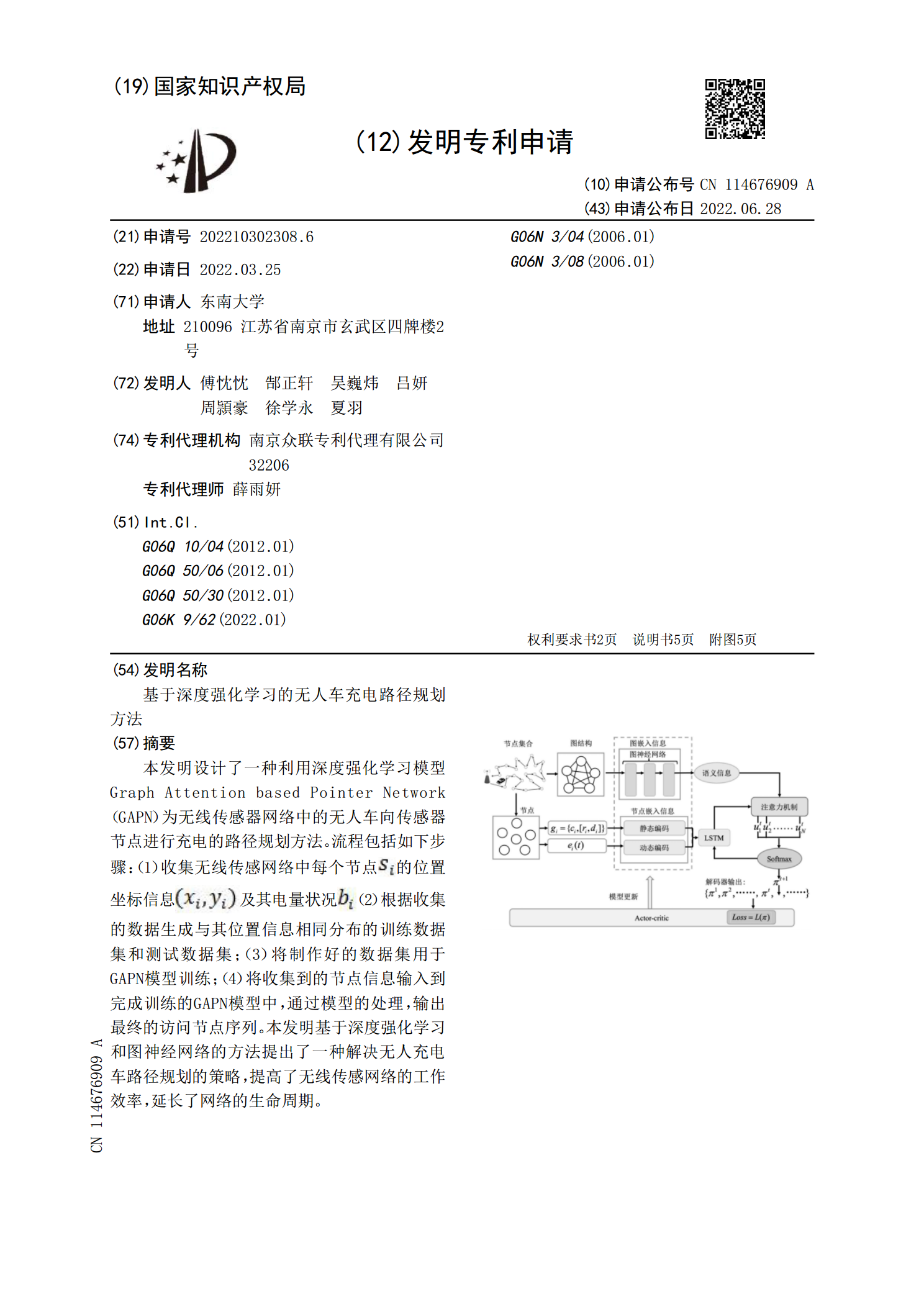
基于深度强化学习的无人车充电路径规划方法.pdf
本发明设计了一种利用深度强化学习模型GraphAttentionbasedPointerNetwork(GAPN)为无线传感器网络中的无人车向传感器节点进行充电的路径规划方法。流程包括如下步骤:(1)收集无线传感网络中每个节点<base:Imagehe=@17@wi=@15@file=@DEST_PATH_IMAGE002.JPG@imgContent=@drawing@imgFormat=@JPEG@orientation=@portrait@inline=@yes@/>的位置坐标信息<base:Ima

基于深度强化学习的多无人车协同路径规划方法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于深度强化学习的多无人车协同路径规划方法目录一、内容简述................................................21.研究背景与意义........................................22.国内外研究现状........................................33.研究内容与方法........................................4
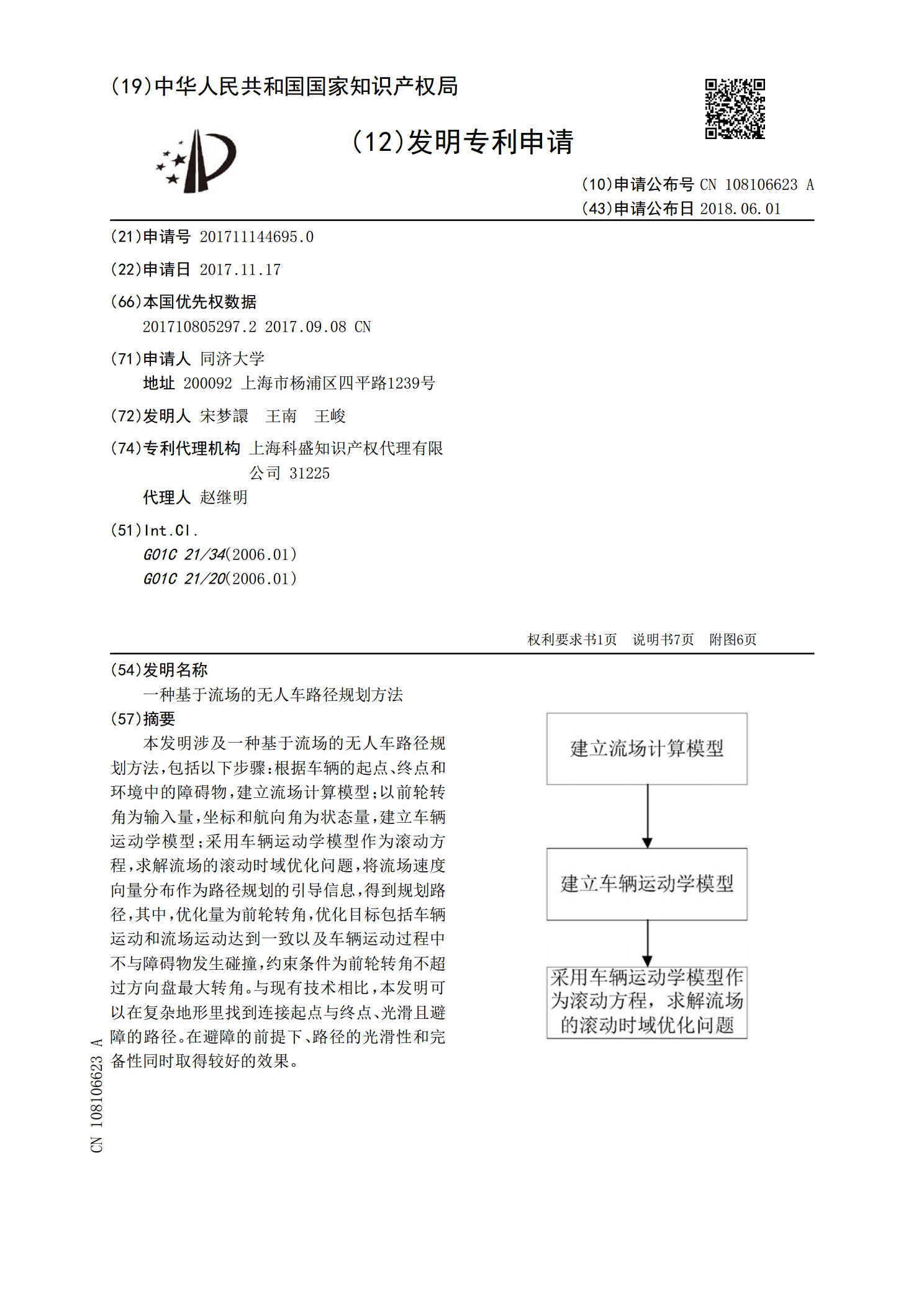
一种基于流场的无人车路径规划方法.pdf
本发明涉及一种基于流场的无人车路径规划方法,包括以下步骤:根据车辆的起点、终点和环境中的障碍物,建立流场计算模型;以前轮转角为输入量,坐标和航向角为状态量,建立车辆运动学模型;采用车辆运动学模型作为滚动方程,求解流场的滚动时域优化问题,将流场速度向量分布作为路径规划的引导信息,得到规划路径,其中,优化量为前轮转角,优化目标包括车辆运动和流场运动达到一致以及车辆运动过程中不与障碍物发生碰撞,约束条件为前轮转角不超过方向盘最大转角。与现有技术相比,本发明可以在复杂地形里找到连接起点与终点、光滑且避障的路径。在
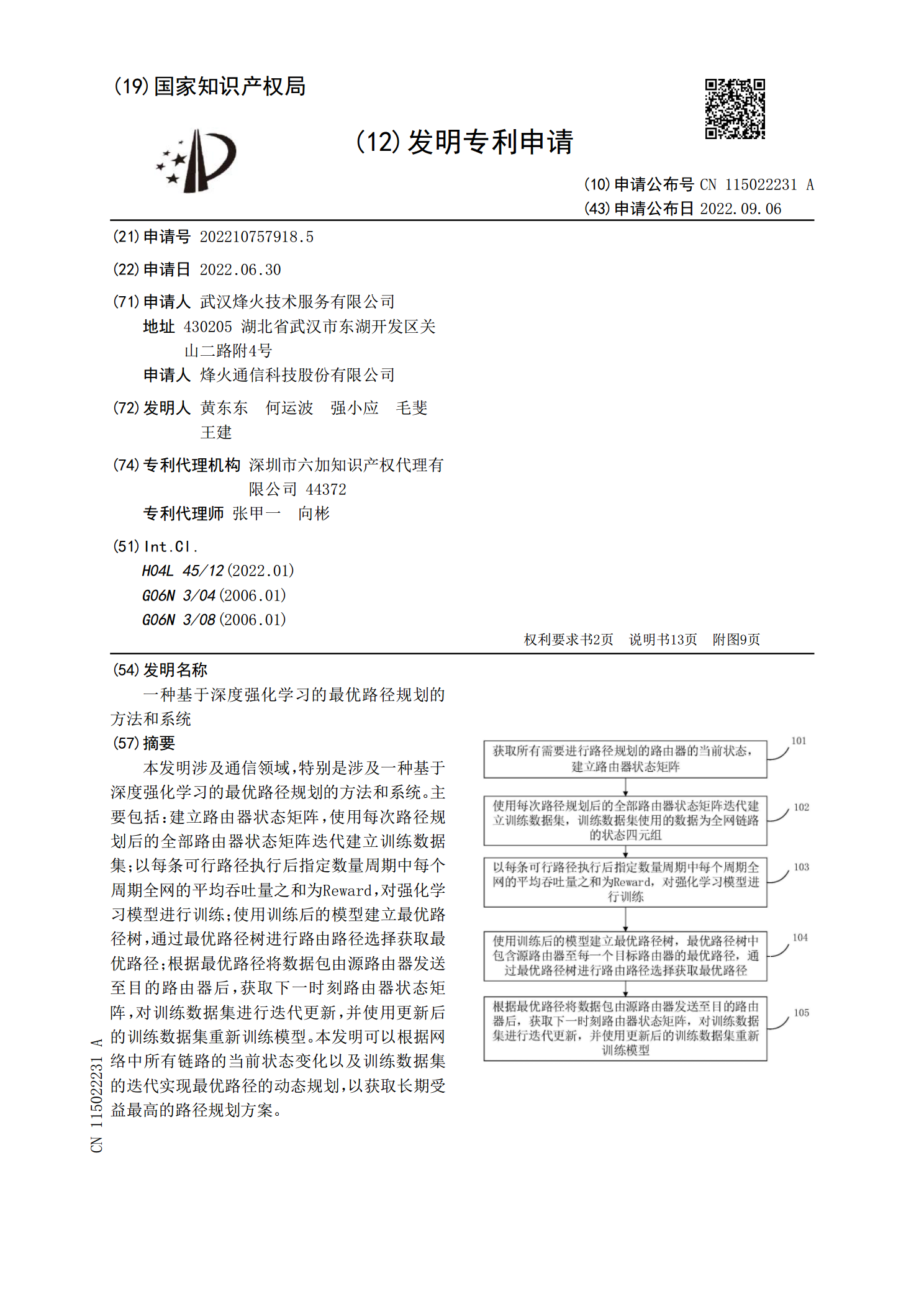
一种基于深度强化学习的最优路径规划的方法和系统.pdf
本发明涉及通信领域,特别是涉及一种基于深度强化学习的最优路径规划的方法和系统。主要包括:建立路由器状态矩阵,使用每次路径规划后的全部路由器状态矩阵迭代建立训练数据集;以每条可行路径执行后指定数量周期中每个周期全网的平均吞吐量之和为Reward,对强化学习模型进行训练;使用训练后的模型建立最优路径树,通过最优路径树进行路由路径选择获取最优路径;根据最优路径将数据包由源路由器发送至目的路由器后,获取下一时刻路由器状态矩阵,对训练数据集进行迭代更新,并使用更新后的训练数据集重新训练模型。本发明可以根据网络中所有