
基于深度强化学习的多无人车协同路径规划方法.docx

wk****31


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于深度强化学习的多无人车协同路径规划方法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于深度强化学习的多无人车协同路径规划方法目录一、内容简述................................................21.研究背景与意义........................................22.国内外研究现状........................................33.研究内容与方法........................................4
基于深度强化学习的无人车充电路径规划方法.pdf
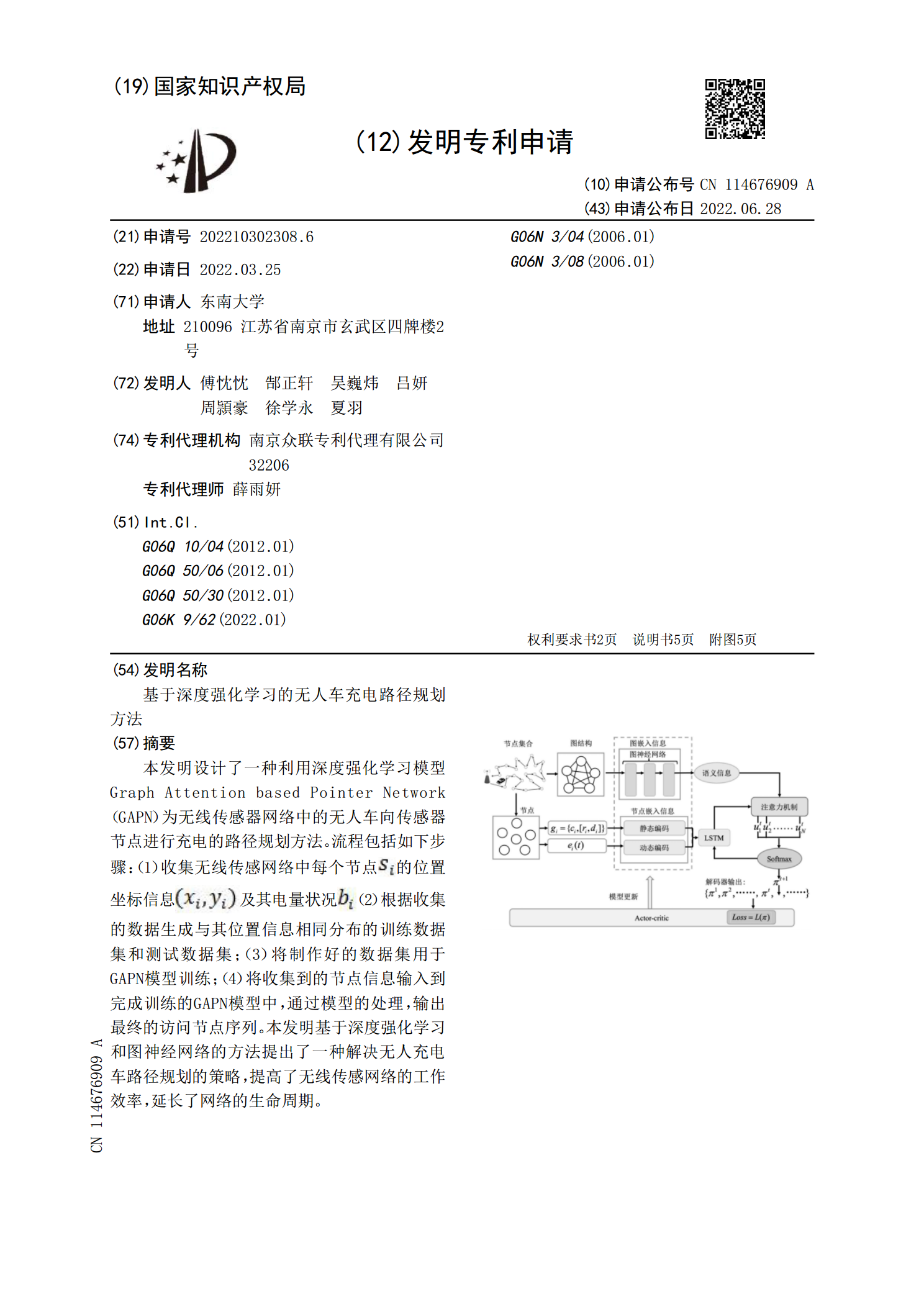
本发明设计了一种利用深度强化学习模型GraphAttentionbasedPointerNetwork(GAPN)为无线传感器网络中的无人车向传感器节点进行充电的路径规划方法。流程包括如下步骤:(1)收集无线传感网络中每个节点<base:Imagehe=@17@wi=@15@file=@DEST_PATH_IMAGE002.JPG@imgContent=@drawing@imgFormat=@JPEG@orientation=@portrait@inline=@yes@/>的位置坐标信息<base:Ima
一种基于深度强化学习和A星算法的无人车路径规划方法.pdf
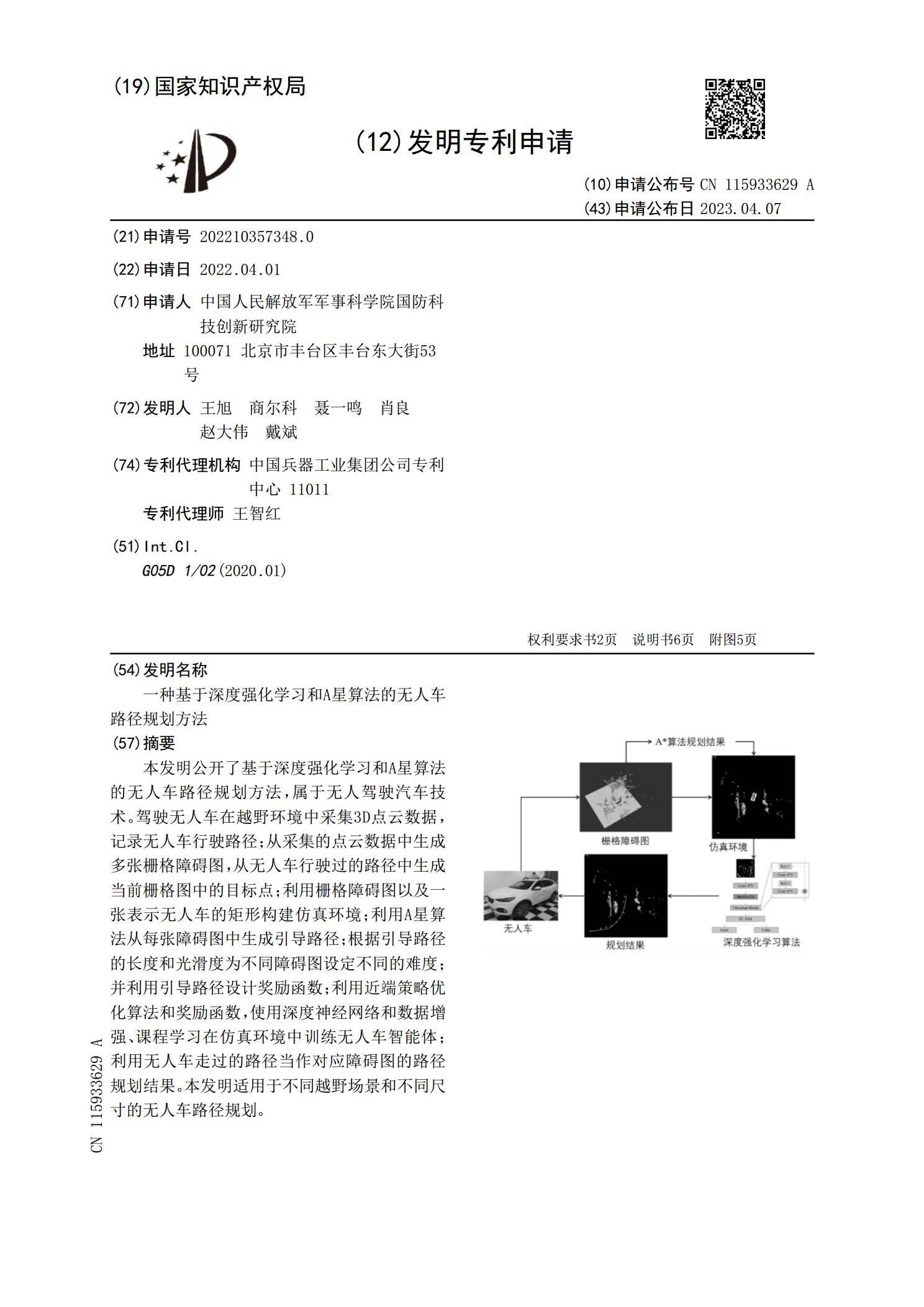
本发明公开了基于深度强化学习和A星算法的无人车路径规划方法,属于无人驾驶汽车技术。驾驶无人车在越野环境中采集3D点云数据,记录无人车行驶路径;从采集的点云数据中生成多张栅格障碍图,从无人车行驶过的路径中生成当前栅格图中的目标点;利用栅格障碍图以及一张表示无人车的矩形构建仿真环境;利用A星算法从每张障碍图中生成引导路径;根据引导路径的长度和光滑度为不同障碍图设定不同的难度;并利用引导路径设计奖励函数;利用近端策略优化算法和奖励函数,使用深度神经网络和数据增强、课程学习在仿真环境中训练无人车智能体;利用无人车
多无人车协同遍历任务的智能路径规划方法.pdf
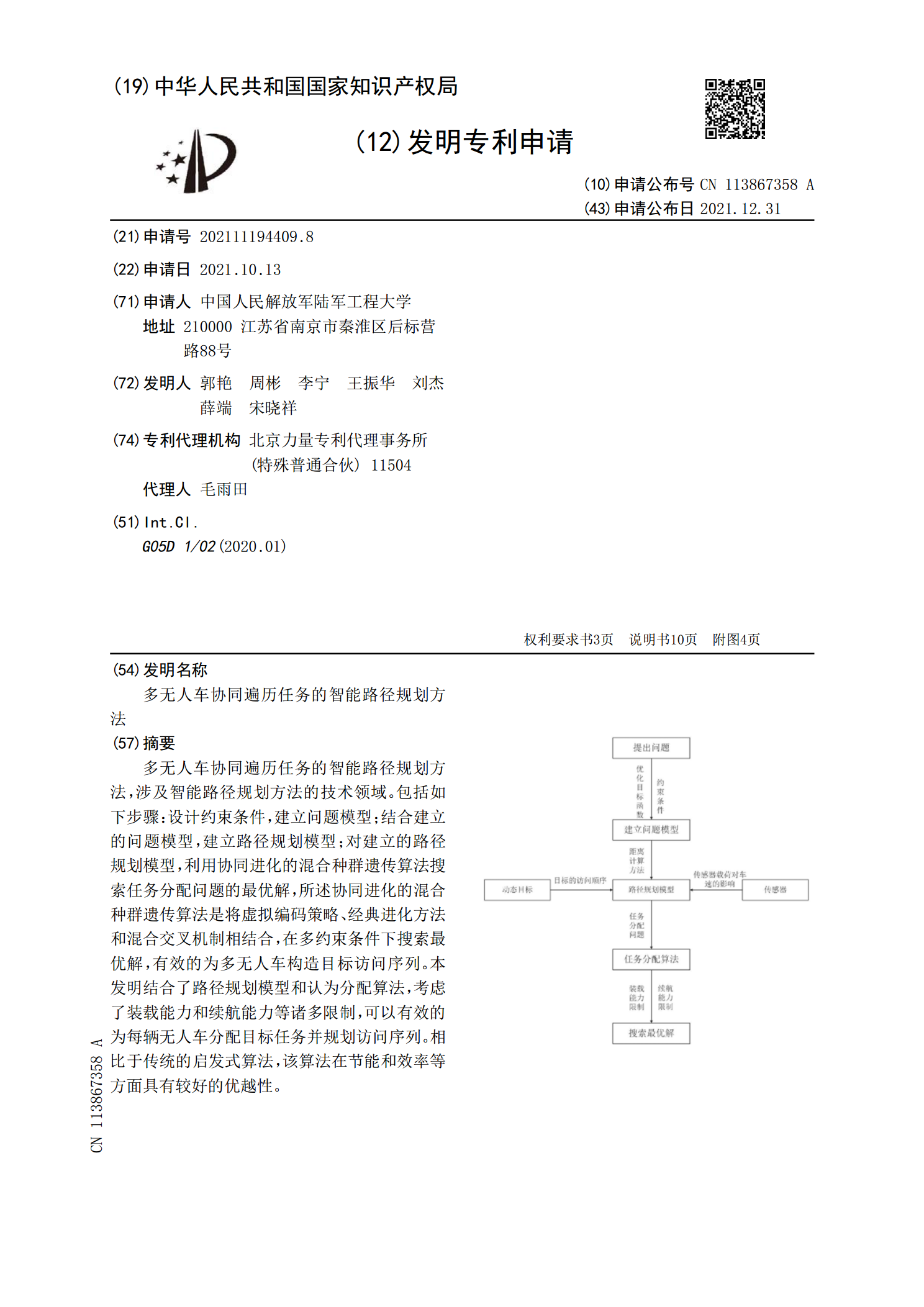
多无人车协同遍历任务的智能路径规划方法,涉及智能路径规划方法的技术领域。包括如下步骤:设计约束条件,建立问题模型;结合建立的问题模型,建立路径规划模型;对建立的路径规划模型,利用协同进化的混合种群遗传算法搜索任务分配问题的最优解,所述协同进化的混合种群遗传算法是将虚拟编码策略、经典进化方法和混合交叉机制相结合,在多约束条件下搜索最优解,有效的为多无人车构造目标访问序列。本发明结合了路径规划模型和认为分配算法,考虑了装载能力和续航能力等诸多限制,可以有效的为每辆无人车分配目标任务并规划访问序列。相比于传统的
基于分层强化学习的无人机路径规划方法.pdf
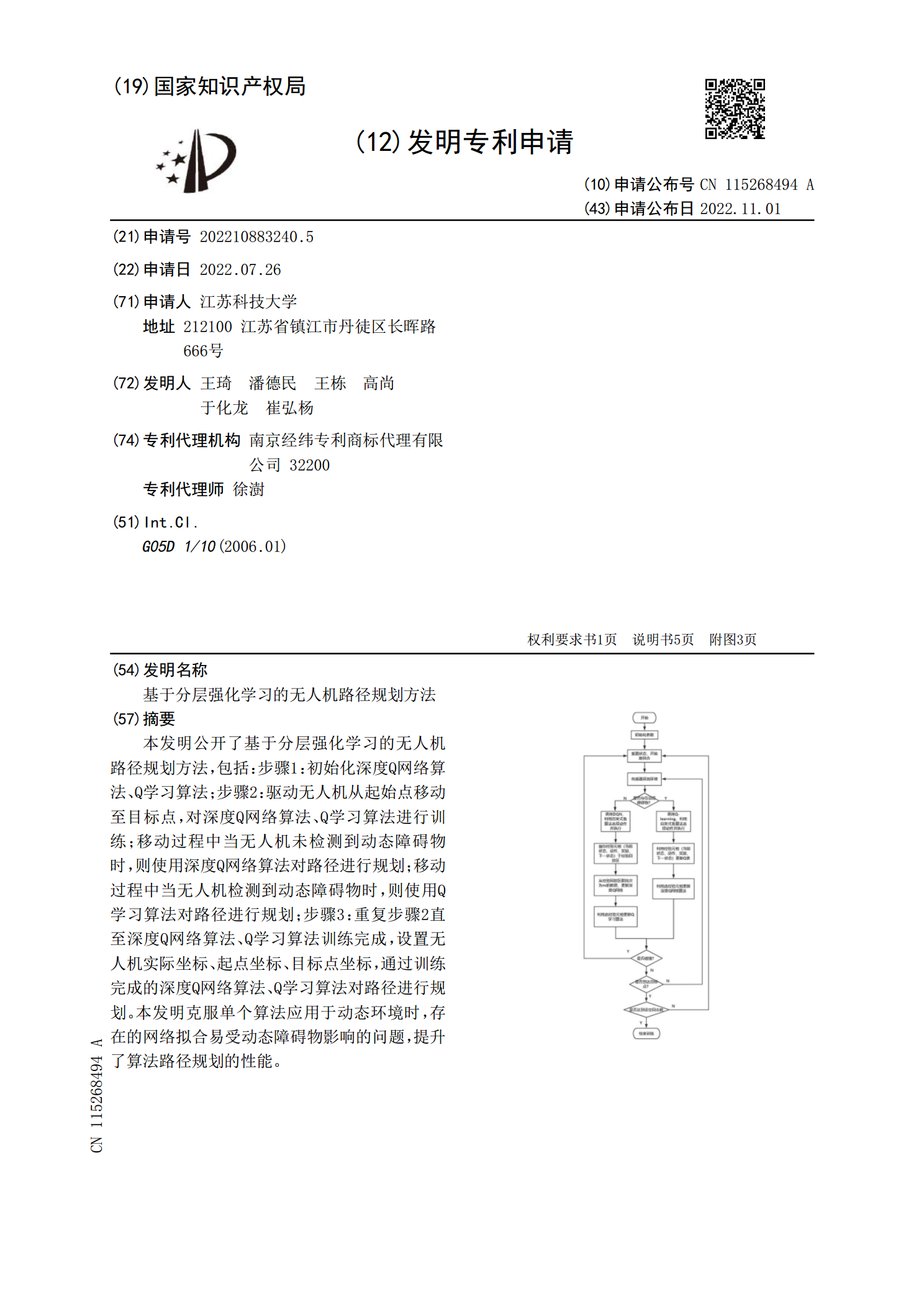
本发明公开了基于分层强化学习的无人机路径规划方法,包括:步骤1:初始化深度Q网络算法、Q学习算法;步骤2:驱动无人机从起始点移动至目标点,对深度Q网络算法、Q学习算法进行训练;移动过程中当无人机未检测到动态障碍物时,则使用深度Q网络算法对路径进行规划;移动过程中当无人机检测到动态障碍物时,则使用Q学习算法对路径进行规划;步骤3:重复步骤2直至深度Q网络算法、Q学习算法训练完成,设置无人机实际坐标、起点坐标、目标点坐标,通过训练完成的深度Q网络算法、Q学习算法对路径进行规划。本发明克服单个算法应用于动态环境