
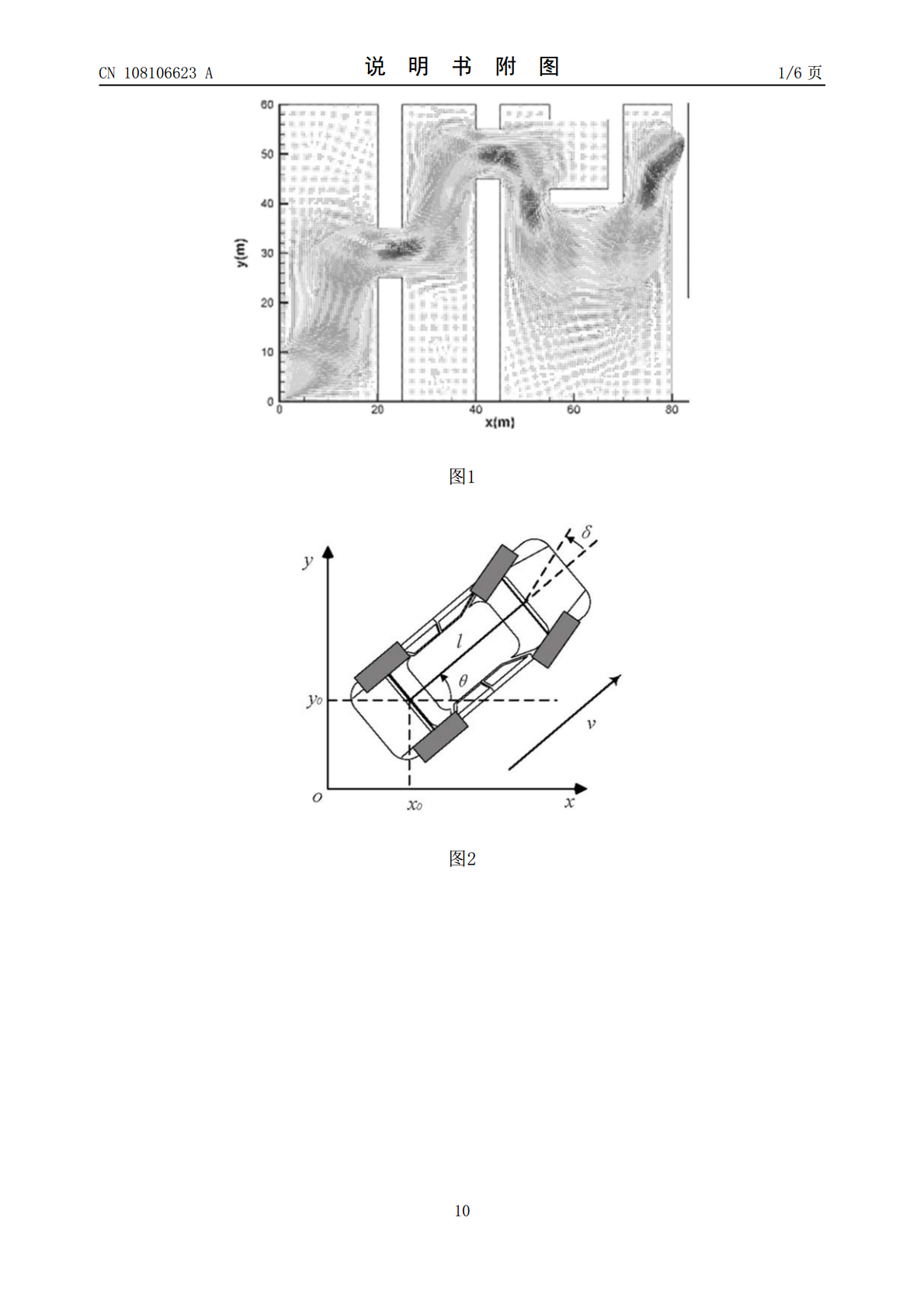
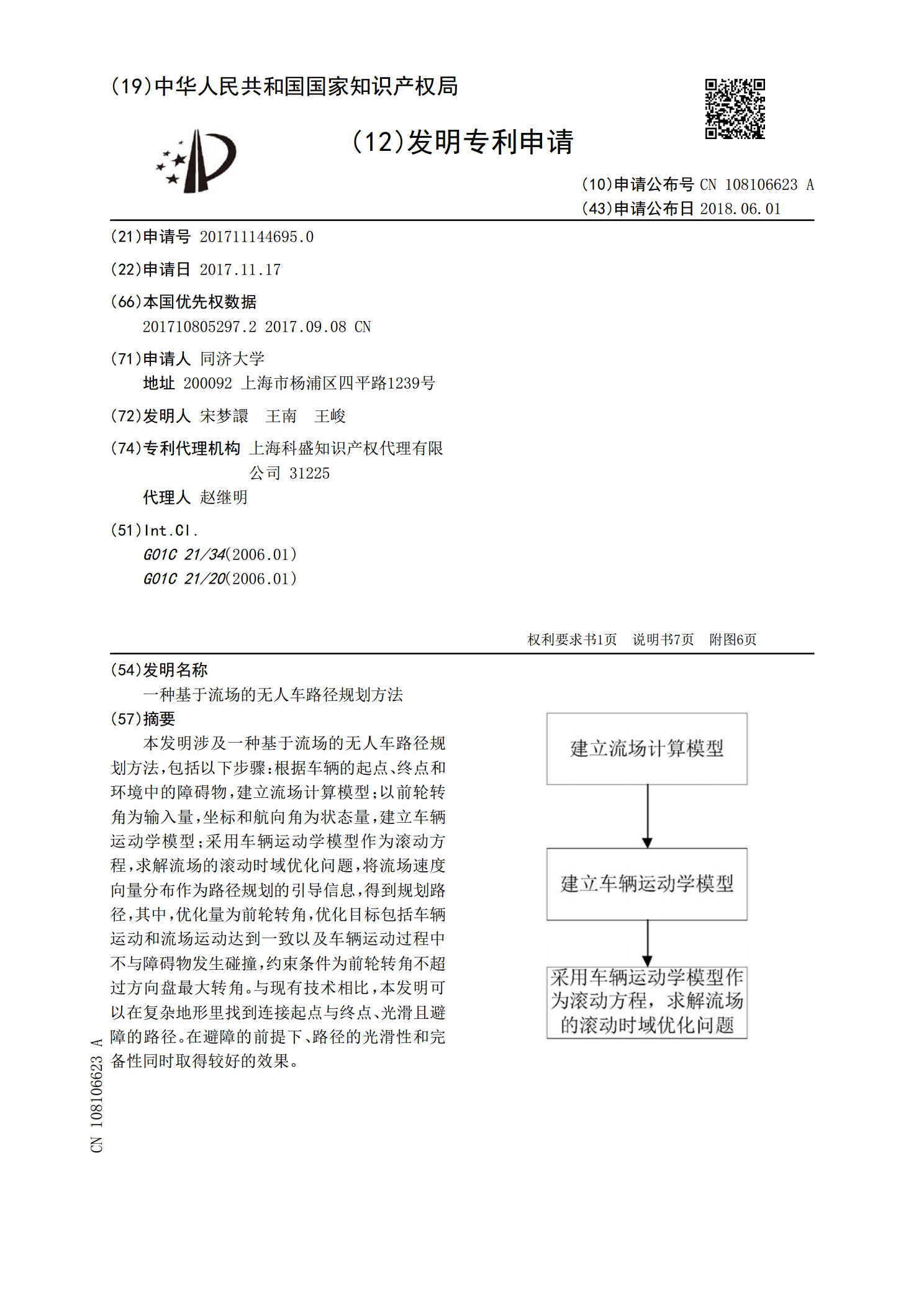
一种基于流场的无人车路径规划方法.pdf

书生****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于流场的无人车路径规划方法.pdf
本发明涉及一种基于流场的无人车路径规划方法,包括以下步骤:根据车辆的起点、终点和环境中的障碍物,建立流场计算模型;以前轮转角为输入量,坐标和航向角为状态量,建立车辆运动学模型;采用车辆运动学模型作为滚动方程,求解流场的滚动时域优化问题,将流场速度向量分布作为路径规划的引导信息,得到规划路径,其中,优化量为前轮转角,优化目标包括车辆运动和流场运动达到一致以及车辆运动过程中不与障碍物发生碰撞,约束条件为前轮转角不超过方向盘最大转角。与现有技术相比,本发明可以在复杂地形里找到连接起点与终点、光滑且避障的路径。在

一种基于人工势场的无人车弯道避障路径规划方法.pdf
本发明涉及一种基于人工势场的无人车弯道避障路径规划方法,属于无人车驾驶技术领域。现有的人工势场法在规划无人车避障路径时,存在局部最优问题,本发明在构建人工合力势场的基础上,根据合力判断主车是否陷入局部最优,通过绕圆避障1的方式解决局部最优问题,通过绕圆避障2的方式解决规划出的下一轨迹点位于障碍物膨胀范围内的问题,并且在绕圆避障过程中,根据合力对主车速度进行调整,从而保障车辆安全。
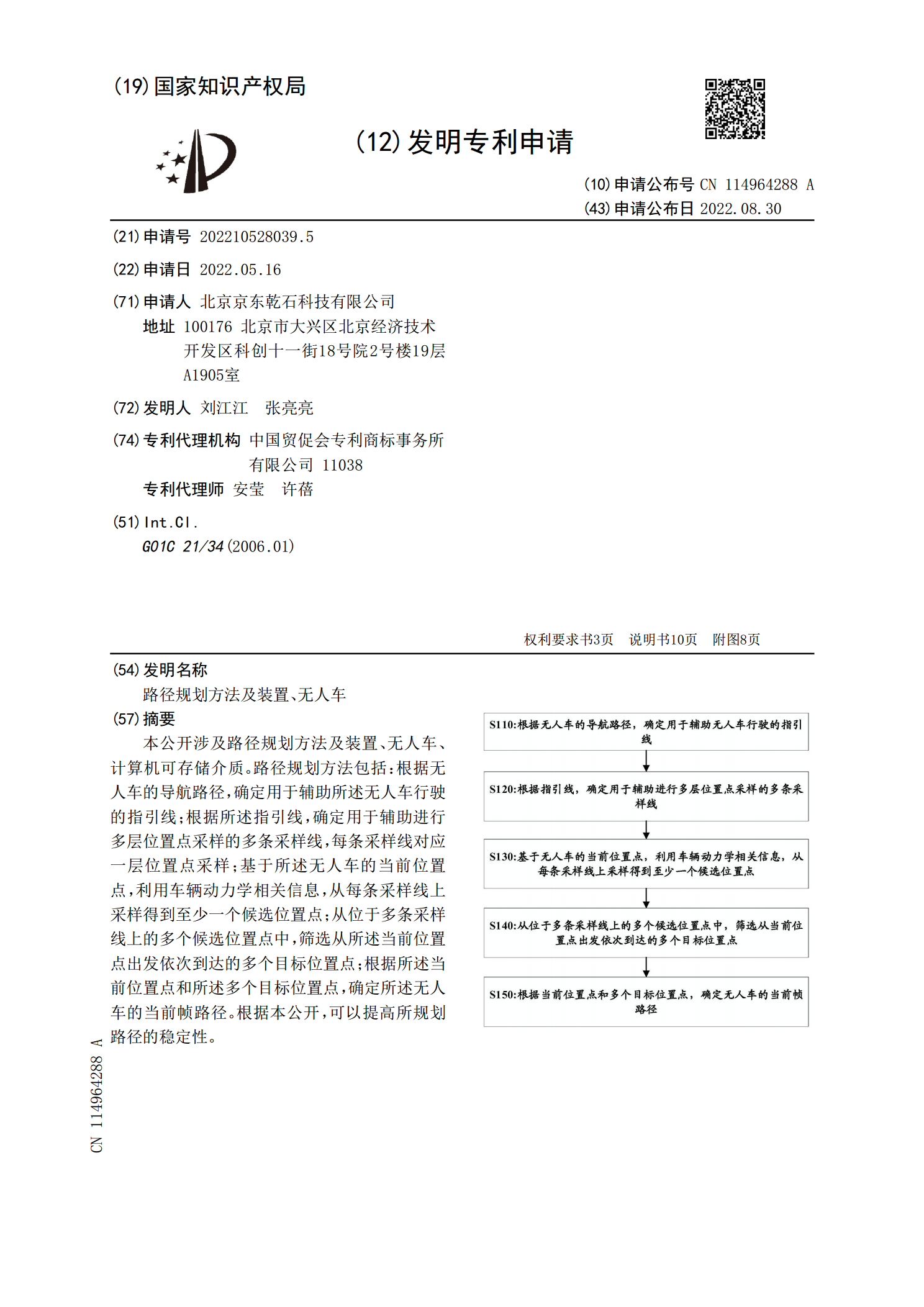
路径规划方法及装置、无人车.pdf
本公开涉及路径规划方法及装置、无人车、计算机可存储介质。路径规划方法包括:根据无人车的导航路径,确定用于辅助所述无人车行驶的指引线;根据所述指引线,确定用于辅助进行多层位置点采样的多条采样线,每条采样线对应一层位置点采样;基于所述无人车的当前位置点,利用车辆动力学相关信息,从每条采样线上采样得到至少一个候选位置点;从位于多条采样线上的多个候选位置点中,筛选从所述当前位置点出发依次到达的多个目标位置点;根据所述当前位置点和所述多个目标位置点,确定所述无人车的当前帧路径。根据本公开,可以提高所规划路径的稳定性

一种基于BCO优化的阿克曼结构无人车路径规划方法.pdf
本发明公开了一种基于BCO优化的阿克曼结构无人车路径规划方法,属于无人车路径规划领域,包括如下步骤:步骤1:设定路径的起点和终点,并根据三维栅格地图的特征信息,设置初始节点的信息素值;步骤2:使预设数量的甲壳虫根据初始节点的信息素找到初始最短路径并更新信息素浓度;步骤3:在传统的蚁群群智能算法中引入甲壳虫触须的单智能体搜索机制,根据更新后的信息素浓度寻找最短路径,找到最短路径后,根据ACO中的蚁周模型更新信息素浓度;步骤4:重复执行步骤3,当迭代次数达到预设的上限后,停止迭代。本发明具有搜索范围广和搜索效

基于势场搜索的无人车动态避障路径规划算法研究.pptx
基于势场搜索的无人车动态避障路径规划算法研究目录势场搜索算法原理势场搜索算法概述势场搜索算法的基本原理势场搜索算法的优势无人车动态避障路径规划算法研究无人车动态避障路径规划算法概述无人车动态避障路径规划算法的实现无人车动态避障路径规划算法的优化基于势场搜索的无人车动态避障路径规划算法基于势场搜索的无人车动态避障路径规划算法概述基于势场搜索的无人车动态避障路径规划算法的实现基于势场搜索的无人车动态避障路径规划算法的优化实验验证与结果分析实验环境与实验设置实验结果与分析实验结论与讨论总结与展望研究总结研究展望