
基于深度强化学习的无人车充电路径规划方法.pdf

论文****轩吖

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度强化学习的无人车充电路径规划方法.pdf
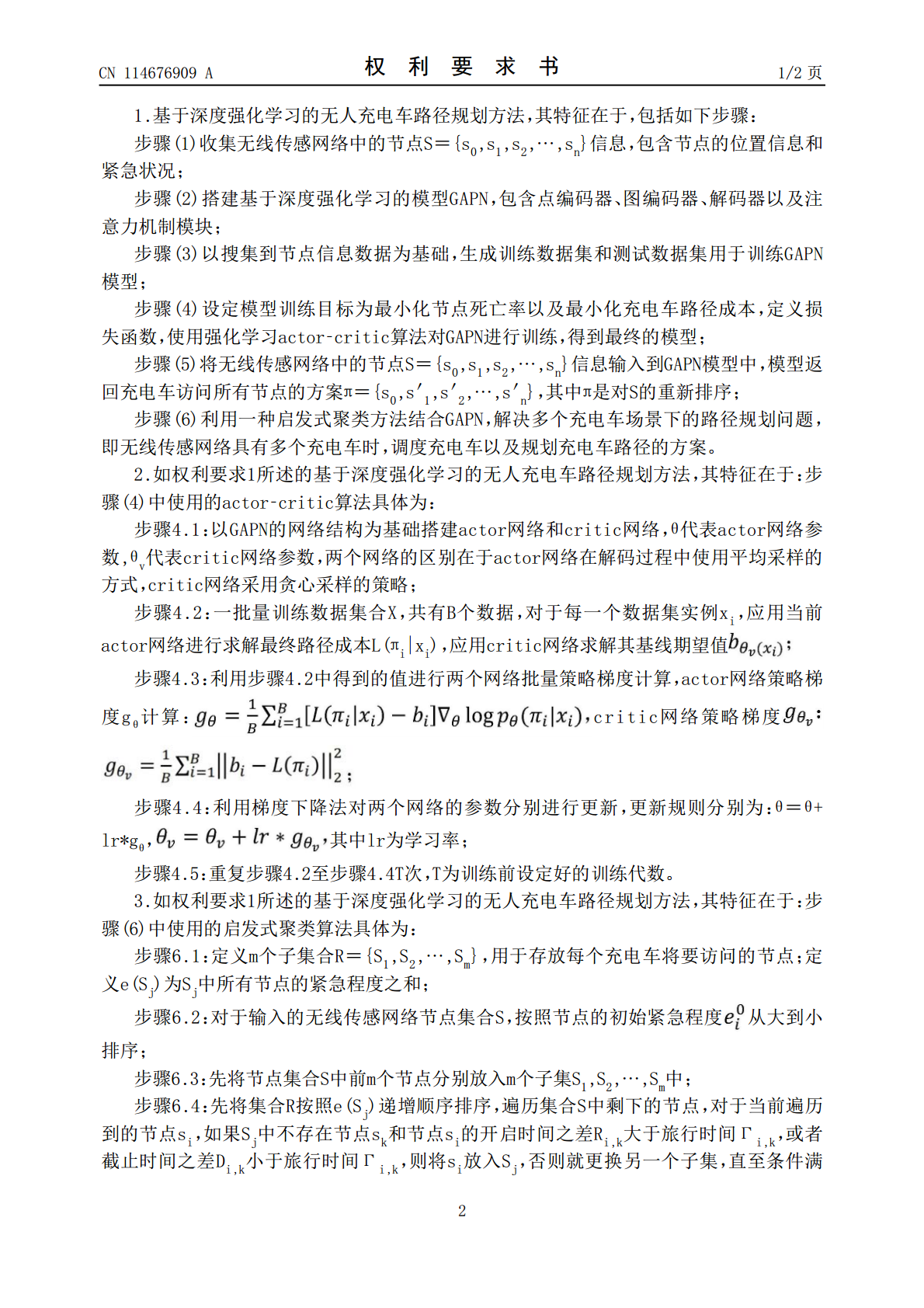
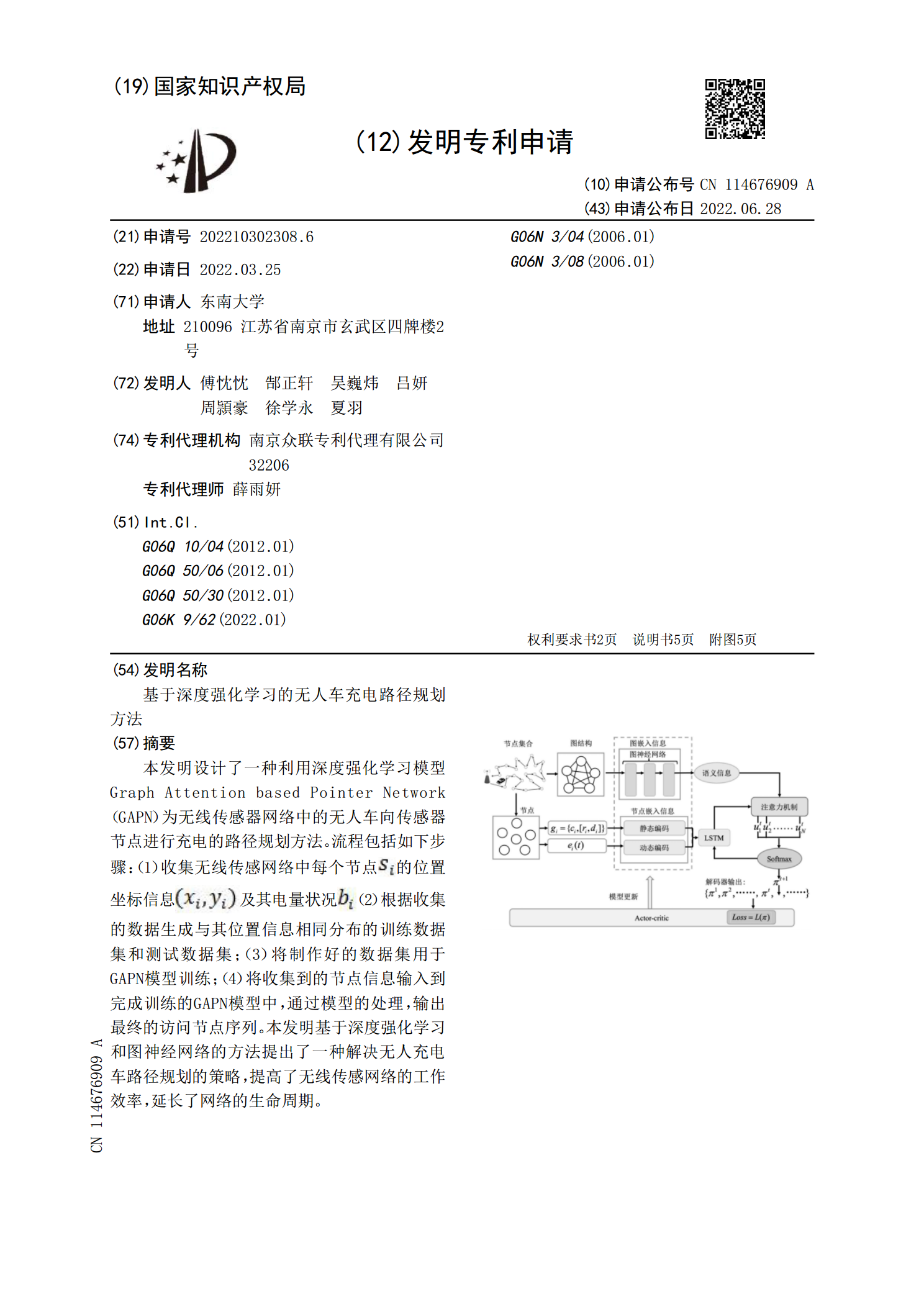
本发明设计了一种利用深度强化学习模型GraphAttentionbasedPointerNetwork(GAPN)为无线传感器网络中的无人车向传感器节点进行充电的路径规划方法。流程包括如下步骤:(1)收集无线传感网络中每个节点<base:Imagehe=@17@wi=@15@file=@DEST_PATH_IMAGE002.JPG@imgContent=@drawing@imgFormat=@JPEG@orientation=@portrait@inline=@yes@/>的位置坐标信息<base:Ima

基于深度强化学习的多无人车协同路径规划方法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于深度强化学习的多无人车协同路径规划方法目录一、内容简述................................................21.研究背景与意义........................................22.国内外研究现状........................................33.研究内容与方法........................................4
一种基于深度强化学习和A星算法的无人车路径规划方法.pdf
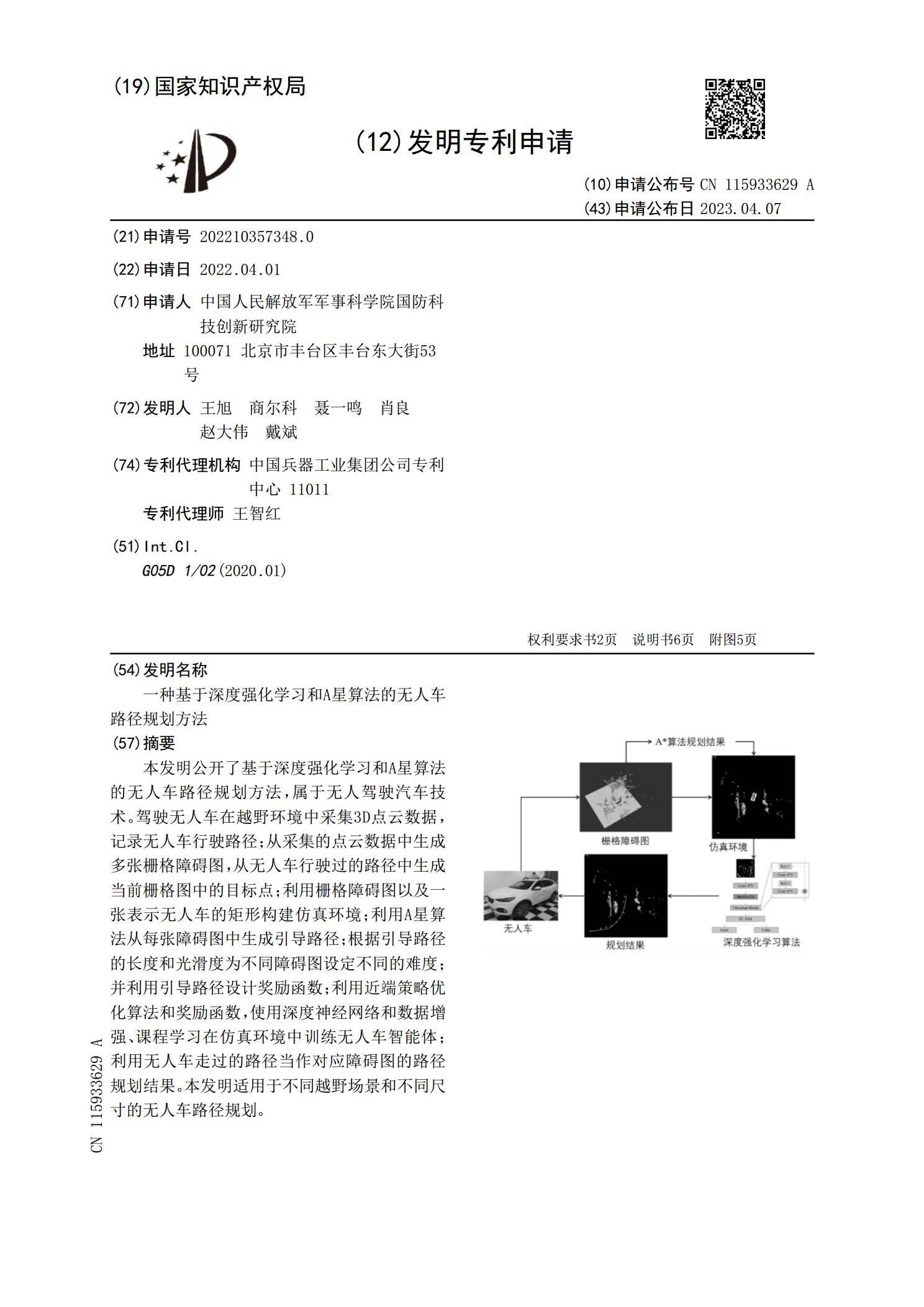
本发明公开了基于深度强化学习和A星算法的无人车路径规划方法,属于无人驾驶汽车技术。驾驶无人车在越野环境中采集3D点云数据,记录无人车行驶路径;从采集的点云数据中生成多张栅格障碍图,从无人车行驶过的路径中生成当前栅格图中的目标点;利用栅格障碍图以及一张表示无人车的矩形构建仿真环境;利用A星算法从每张障碍图中生成引导路径;根据引导路径的长度和光滑度为不同障碍图设定不同的难度;并利用引导路径设计奖励函数;利用近端策略优化算法和奖励函数,使用深度神经网络和数据增强、课程学习在仿真环境中训练无人车智能体;利用无人车
基于分层强化学习的无人机路径规划方法.pdf
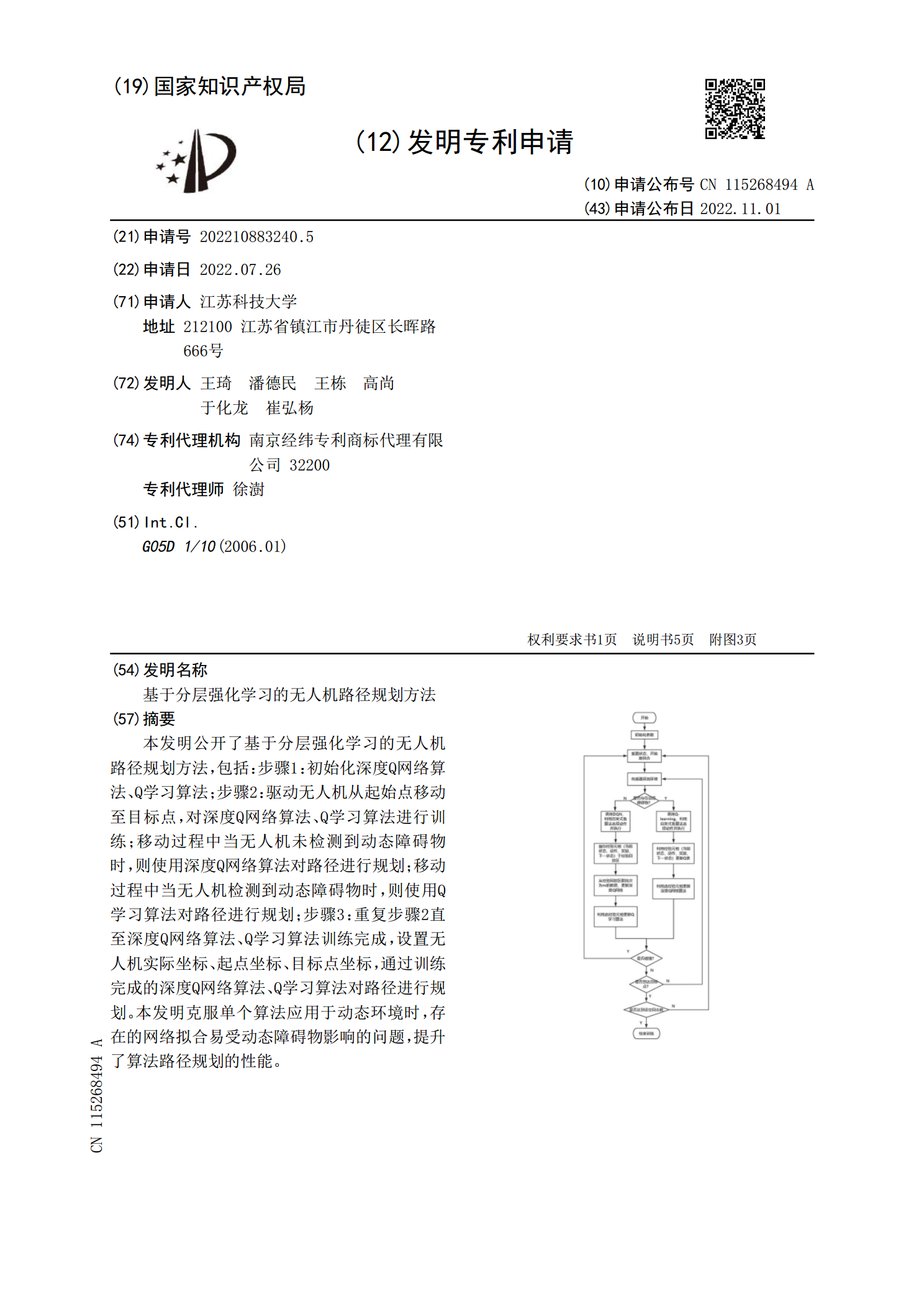
本发明公开了基于分层强化学习的无人机路径规划方法,包括:步骤1:初始化深度Q网络算法、Q学习算法;步骤2:驱动无人机从起始点移动至目标点,对深度Q网络算法、Q学习算法进行训练;移动过程中当无人机未检测到动态障碍物时,则使用深度Q网络算法对路径进行规划;移动过程中当无人机检测到动态障碍物时,则使用Q学习算法对路径进行规划;步骤3:重复步骤2直至深度Q网络算法、Q学习算法训练完成,设置无人机实际坐标、起点坐标、目标点坐标,通过训练完成的深度Q网络算法、Q学习算法对路径进行规划。本发明克服单个算法应用于动态环境

基于深度学习的无人船移动路径自动规划方法.docx
基于深度学习的无人船移动路径自动规划方法一、引言随着技术的不断发展,无人船的应用范围和使用环境也不断扩大。无人船被广泛应用于水域监测、水下勘测、环境调查等领域。在无人船的应用过程中,路径规划是关键问题之一。传统的路径规划方法受限于环境和控制器的精度等因素,无法达到理想的效果。本文基于深度学习,提出了一种基于神经网络的无人船移动路径自动规划方法,利用自主学习的方式,提高了路径规划的精度和速度。二、研究背景与现状无人船移动路径规划在很多领域都有广泛的应用,例如船舶自动驾驶、水质监测等。传统的路径规划方法通常采