
一种基于深度强化学习的最优路径规划的方法和系统.pdf

曾琪****是我


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度强化学习的最优路径规划的方法和系统.pdf
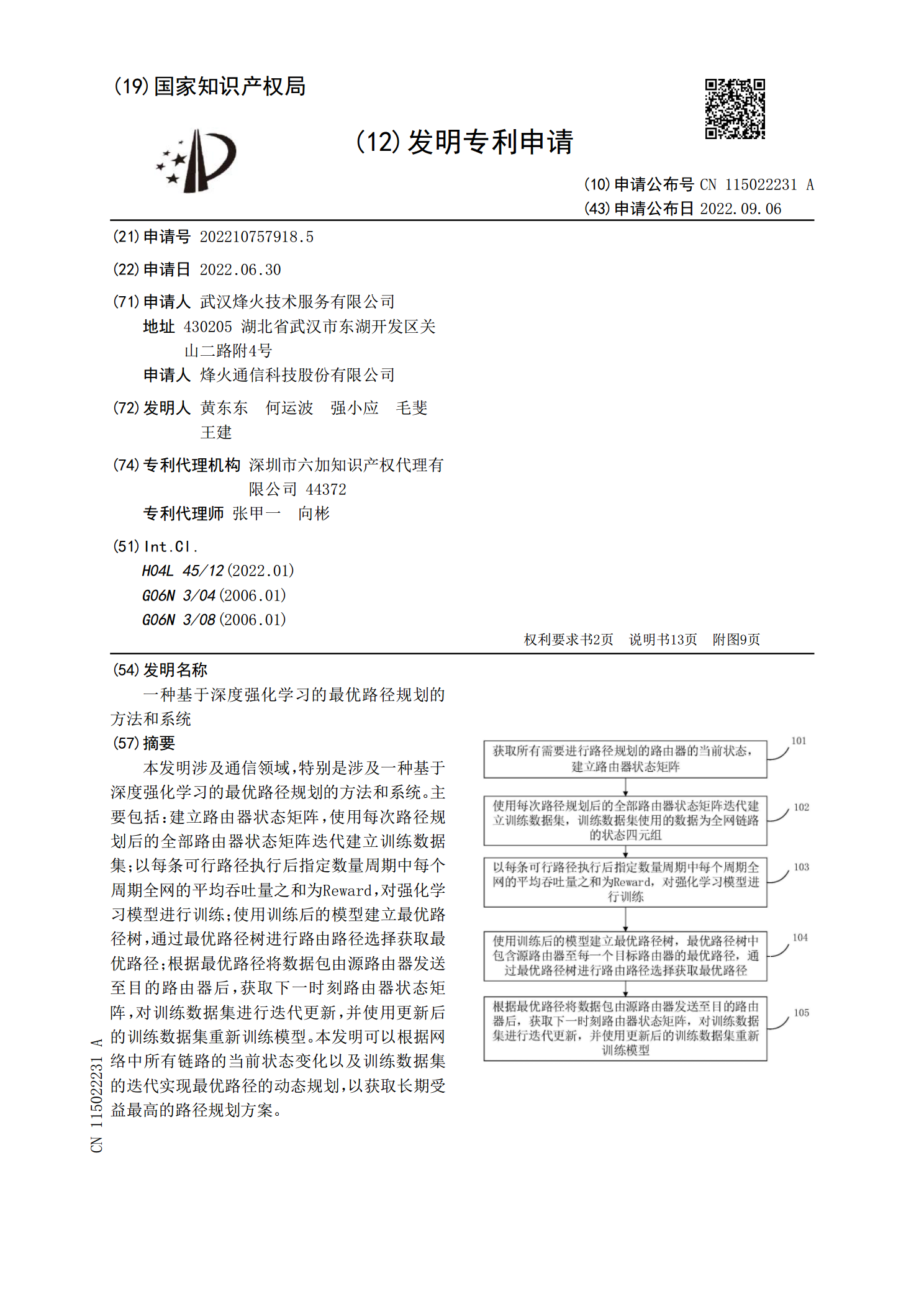
本发明涉及通信领域,特别是涉及一种基于深度强化学习的最优路径规划的方法和系统。主要包括:建立路由器状态矩阵,使用每次路径规划后的全部路由器状态矩阵迭代建立训练数据集;以每条可行路径执行后指定数量周期中每个周期全网的平均吞吐量之和为Reward,对强化学习模型进行训练;使用训练后的模型建立最优路径树,通过最优路径树进行路由路径选择获取最优路径;根据最优路径将数据包由源路由器发送至目的路由器后,获取下一时刻路由器状态矩阵,对训练数据集进行迭代更新,并使用更新后的训练数据集重新训练模型。本发明可以根据网络中所有

基于深度强化学习和块规划的月面路径规划系统和方法.pdf
本发明公开了一种基于深度强化学习和块规划的月面路径规划方法,用于月面机器人在大范围月面地形中的快速路径规划。基于深度强化学习方法,提出了一种端到端的路径规划器,能够基于特定尺寸的月面可穿越性地图和机器人位置、目标位置,直接求解当前最佳运动方向。基于分层思想,设计一种块规划应用架构,首先利用块规划器在缩小地图上进行粗略初始路径规划,然后利用块规划器沿着初始路径进行分块精确路径规划。块规划应用架构能够有效压缩求解空间,显著降低路径规划时耗。本发明主要用于月面大范围遥测地形图上的机器人路径规划,通过端到端规划器
一种基于深度强化学习和A星算法的无人车路径规划方法.pdf
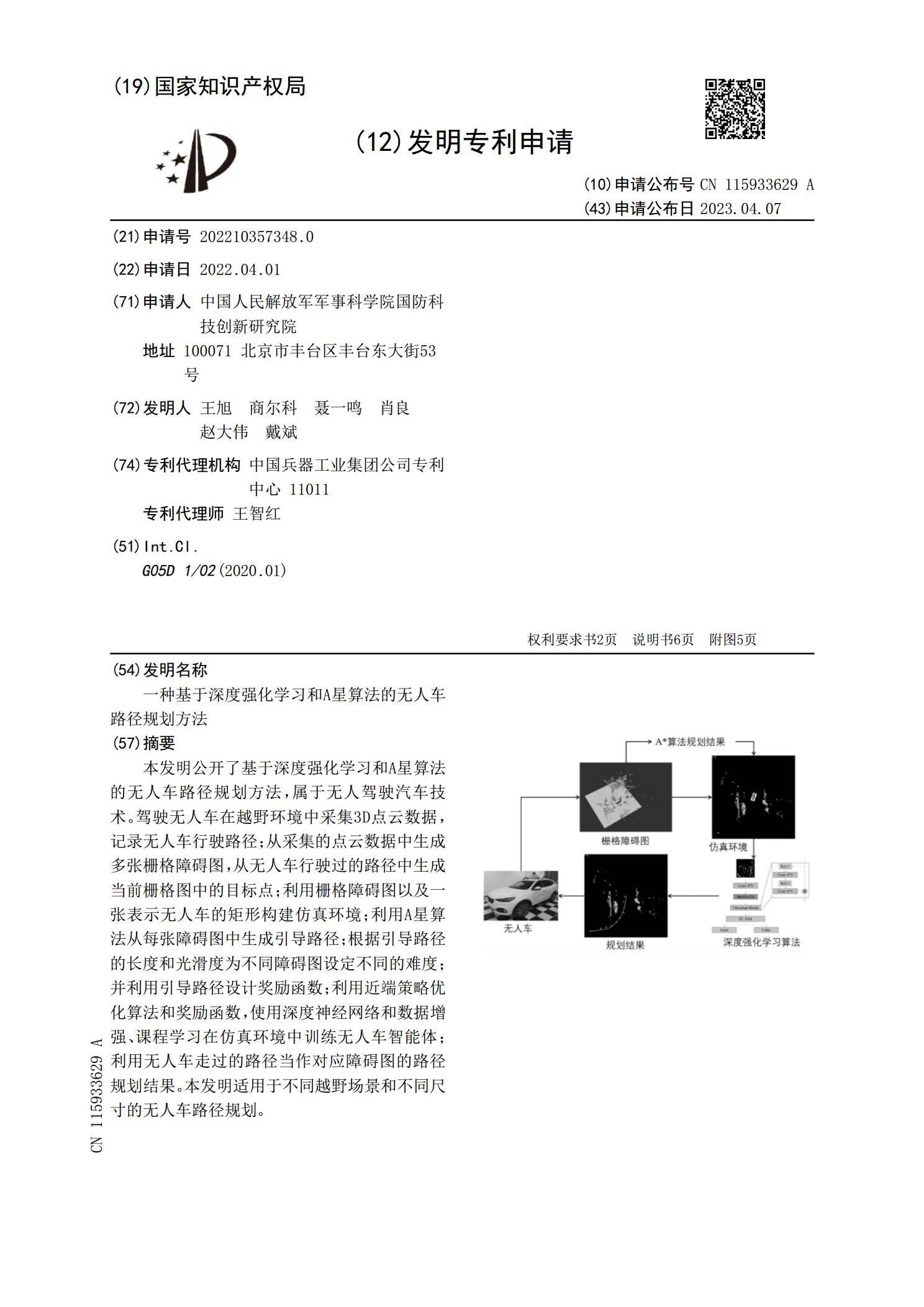
本发明公开了基于深度强化学习和A星算法的无人车路径规划方法,属于无人驾驶汽车技术。驾驶无人车在越野环境中采集3D点云数据,记录无人车行驶路径;从采集的点云数据中生成多张栅格障碍图,从无人车行驶过的路径中生成当前栅格图中的目标点;利用栅格障碍图以及一张表示无人车的矩形构建仿真环境;利用A星算法从每张障碍图中生成引导路径;根据引导路径的长度和光滑度为不同障碍图设定不同的难度;并利用引导路径设计奖励函数;利用近端策略优化算法和奖励函数,使用深度神经网络和数据增强、课程学习在仿真环境中训练无人车智能体;利用无人车

基于深度强化学习的多AGV系统路径规划.docx
基于深度强化学习的多AGV系统路径规划基于深度强化学习的多AGV系统路径规划摘要:近年来,随着物流需求的不断增加,多AGV系统的应用越来越广泛。而在多AGV系统中,路径规划是一个关键的问题。传统的路径规划方法往往无法满足多AGV系统的实时性和效率要求。因此,本论文提出了一种基于深度强化学习的多AGV系统路径规划方法,并对其进行了详细的介绍和分析。1.引言随着物流行业的发展,传统的人工搬运方式已无法满足高效率、低成本的物流需求。因此,多AGV系统作为一种新型的物流搬运方式,逐渐被广泛应用于物流仓库、工厂等领
一种基于深度强化学习的外卖配送路径规划方法.pdf
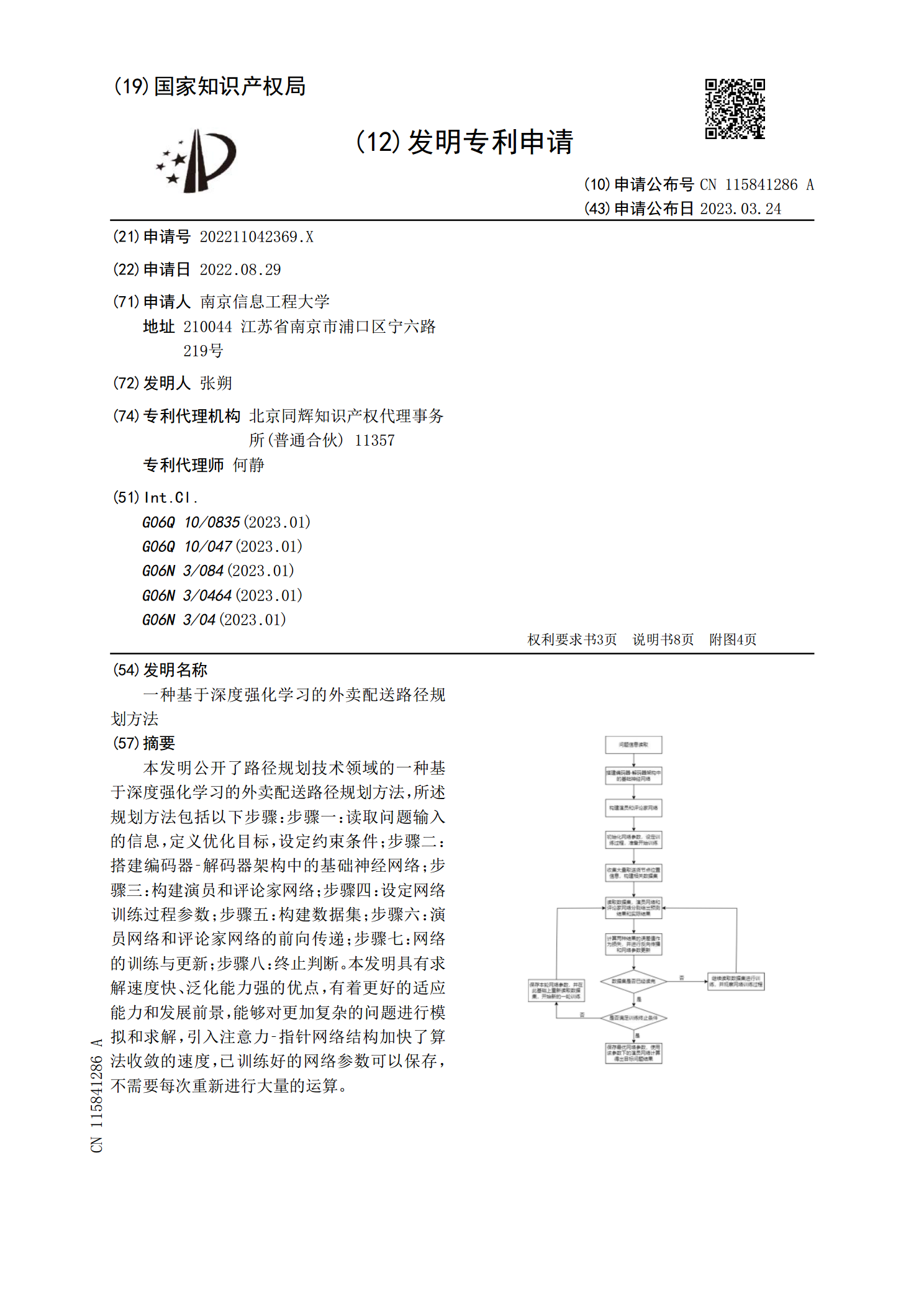
本发明公开了路径规划技术领域的一种基于深度强化学习的外卖配送路径规划方法,所述规划方法包括以下步骤:步骤一:读取问题输入的信息,定义优化目标,设定约束条件;步骤二:搭建编码器‑解码器架构中的基础神经网络;步骤三:构建演员和评论家网络;步骤四:设定网络训练过程参数;步骤五:构建数据集;步骤六:演员网络和评论家网络的前向传递;步骤七:网络的训练与更新;步骤八:终止判断。本发明具有求解速度快、泛化能力强的优点,有着更好的适应能力和发展前景,能够对更加复杂的问题进行模拟和求解,引入注意力‑指针网络结构加快了算法收