
圆弧滑杆通用抓持装置.pdf

一只****生物

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
圆弧滑杆通用抓持装置.pdf
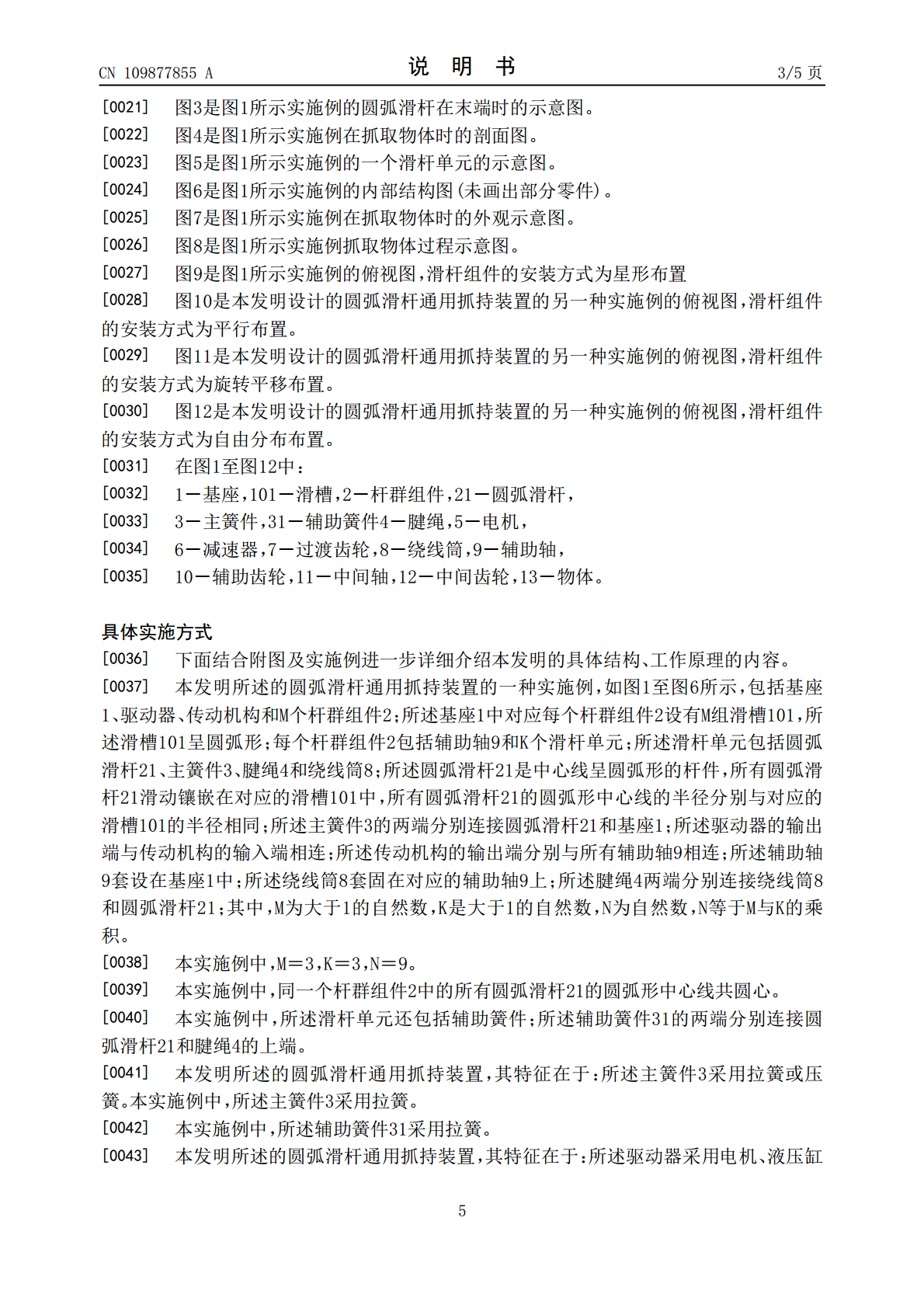
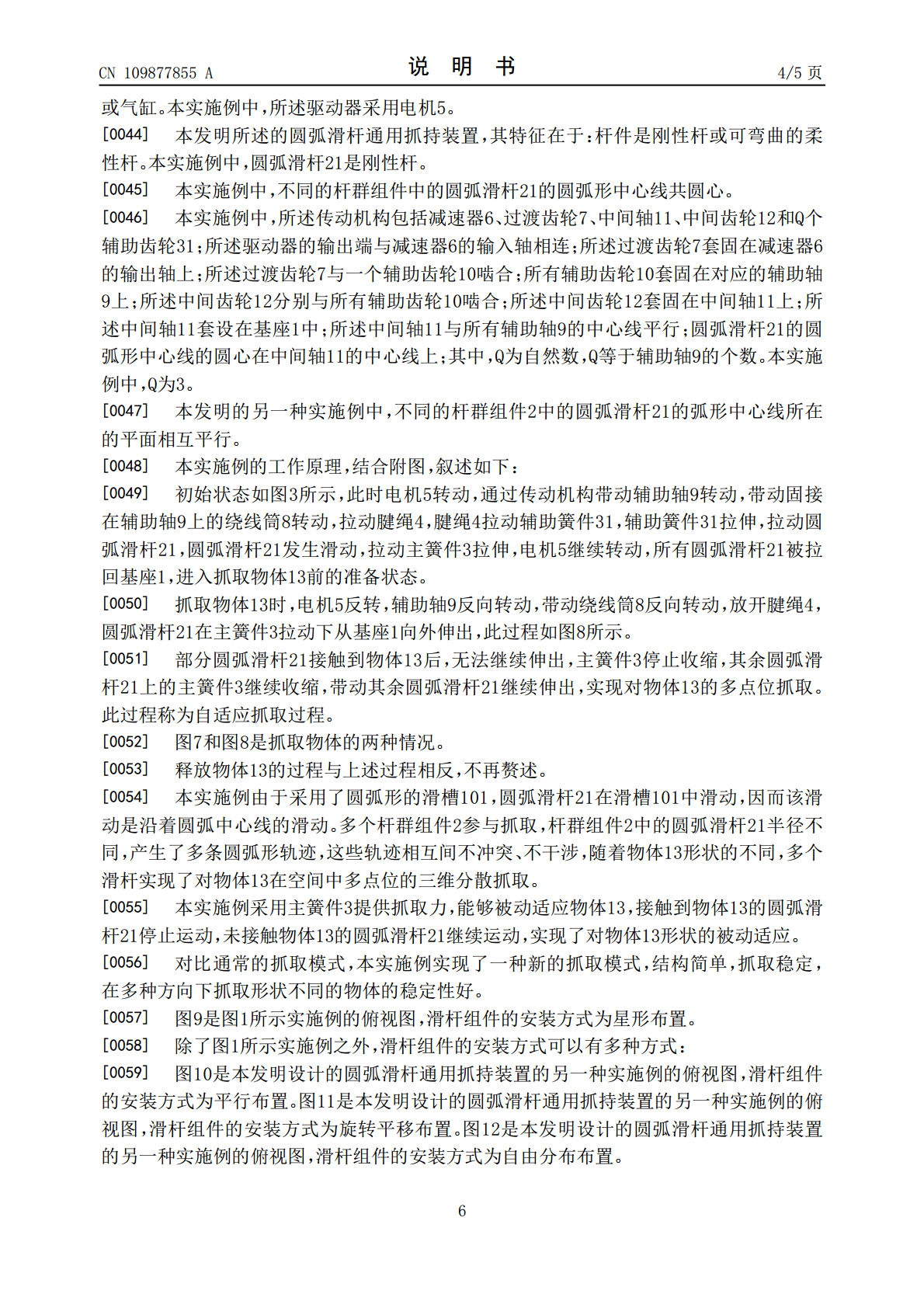
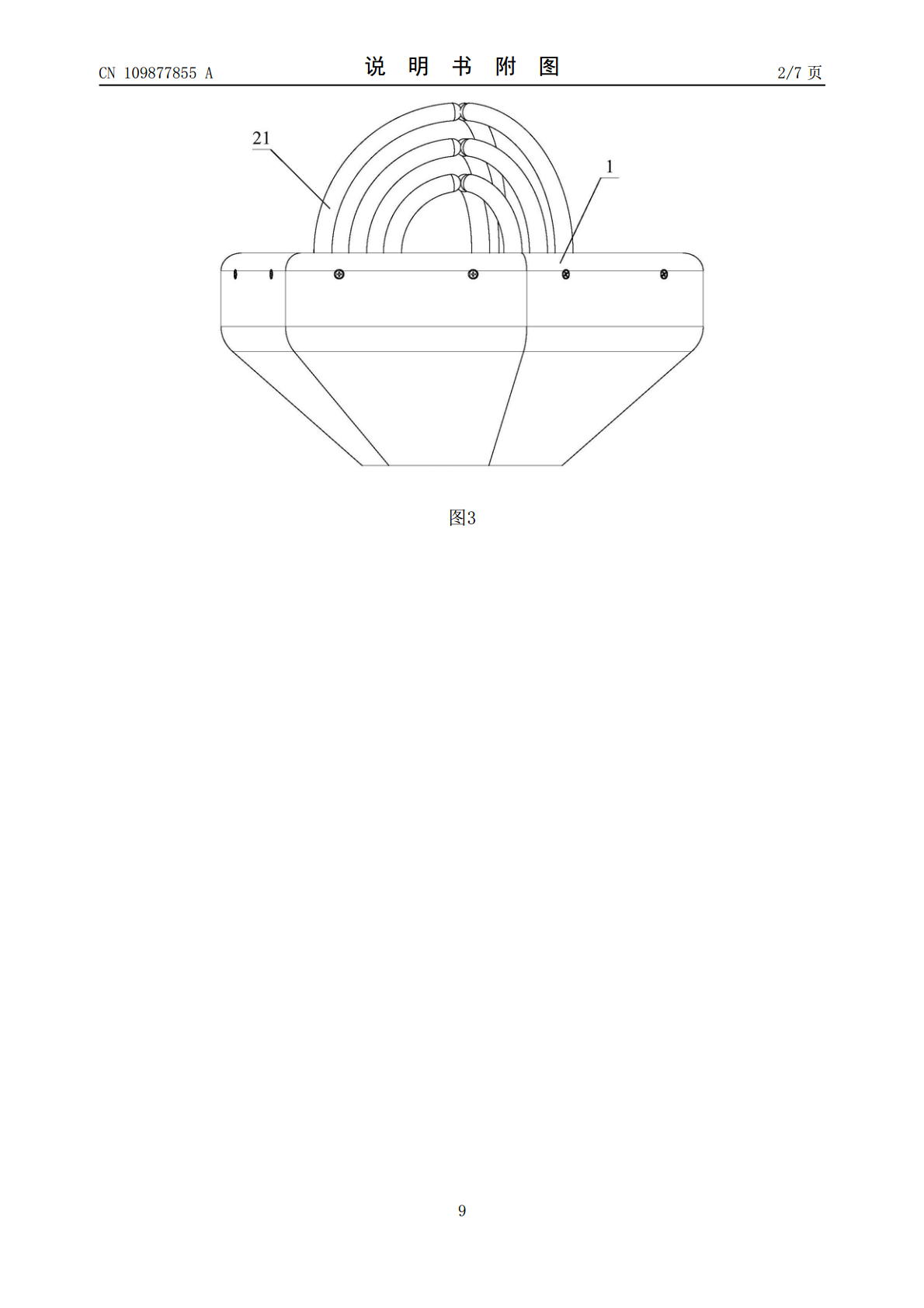
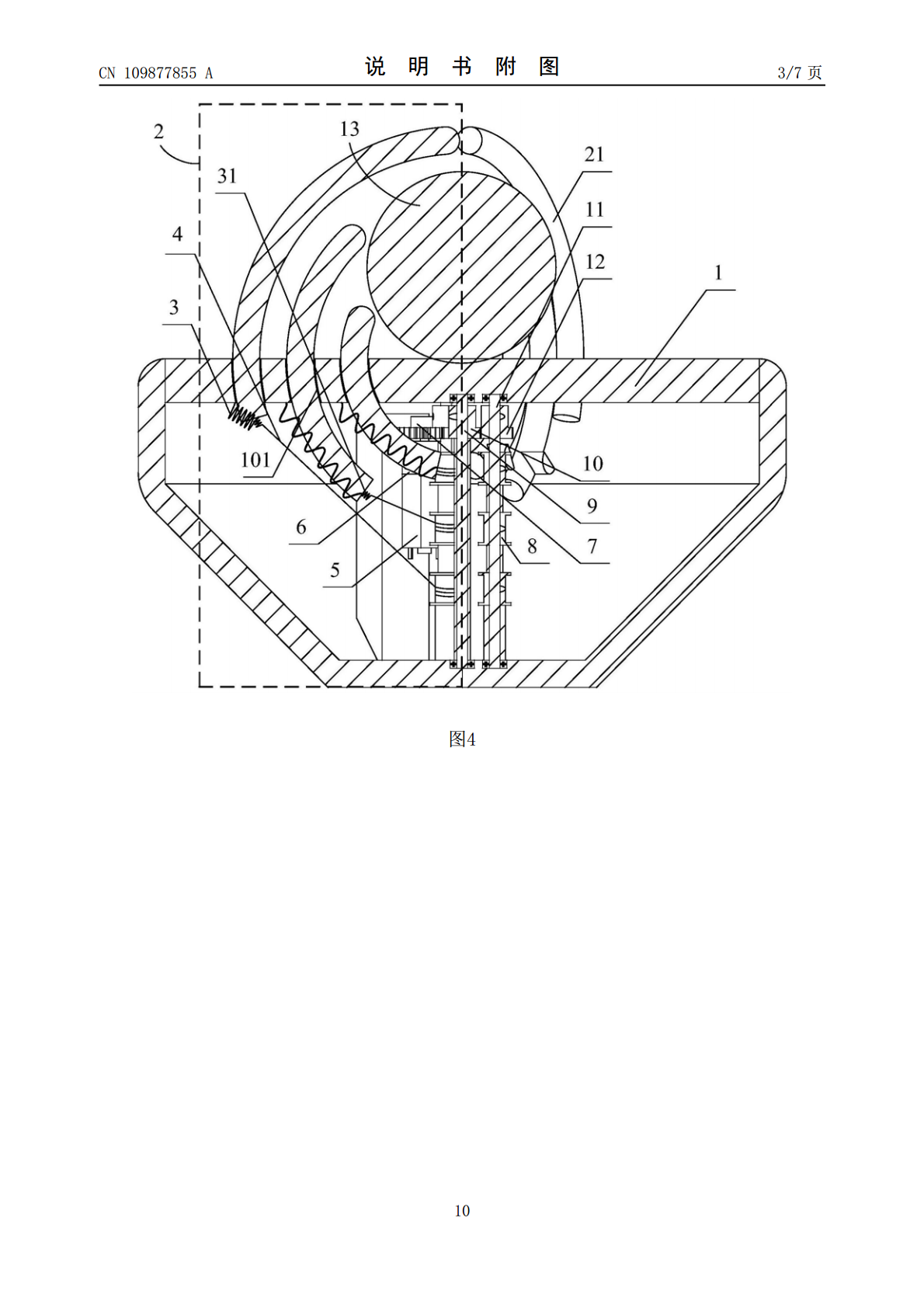
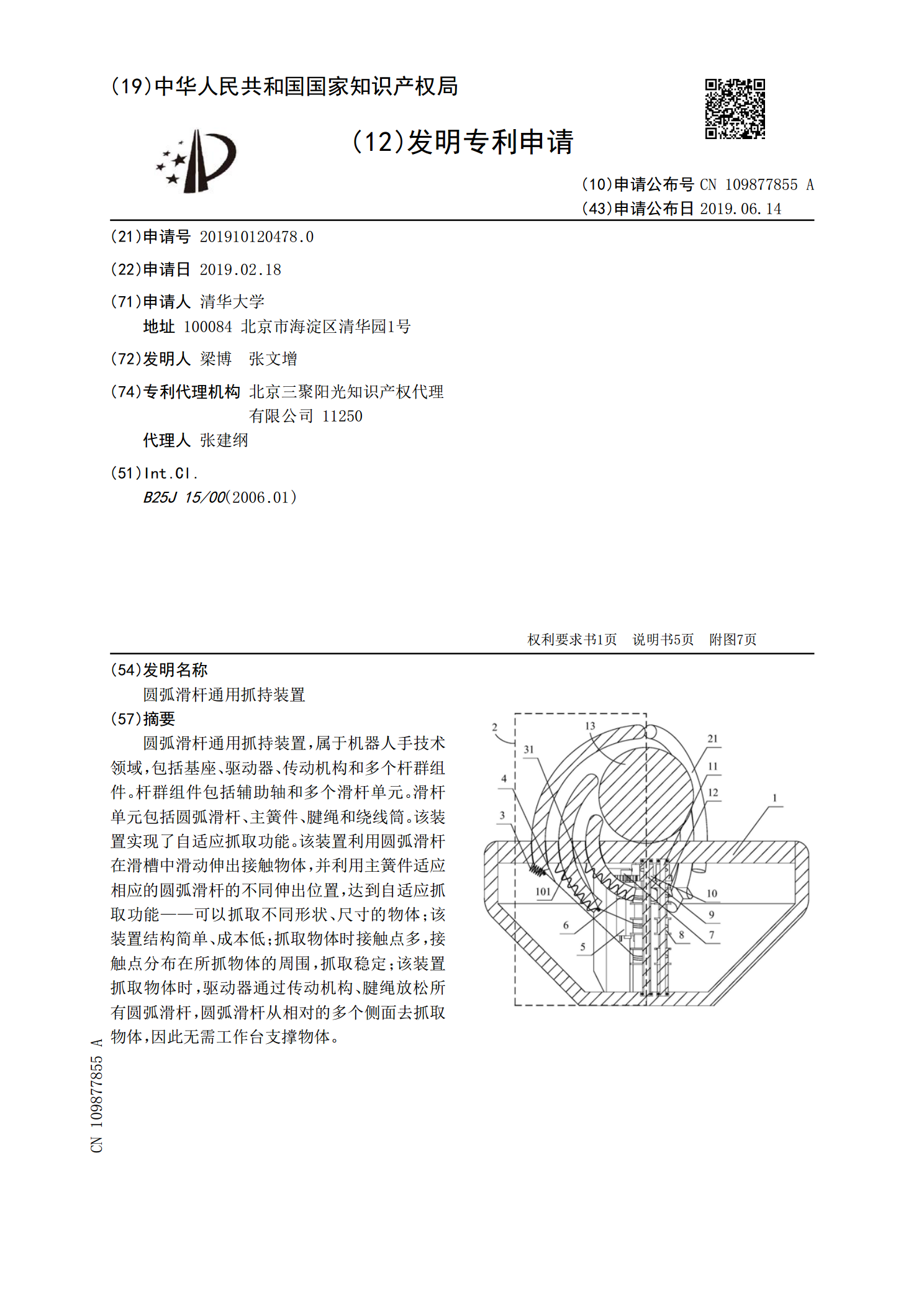
圆弧滑杆通用抓持装置,属于机器人手技术领域,包括基座、驱动器、传动机构和多个杆群组件。杆群组件包括辅助轴和多个滑杆单元。滑杆单元包括圆弧滑杆、主簧件、腱绳和绕线筒。该装置实现了自适应抓取功能。该装置利用圆弧滑杆在滑槽中滑动伸出接触物体,并利用主簧件适应相应的圆弧滑杆的不同伸出位置,达到自适应抓取功能——可以抓取不同形状、尺寸的物体;该装置结构简单、成本低;抓取物体时接触点多,接触点分布在所抓物体的周围,抓取稳定;该装置抓取物体时,驱动器通过传动机构、腱绳放松所有圆弧滑杆,圆弧滑杆从相对的多个侧面去抓取物体
抓持装置以及生产抓持装置的方法.pdf
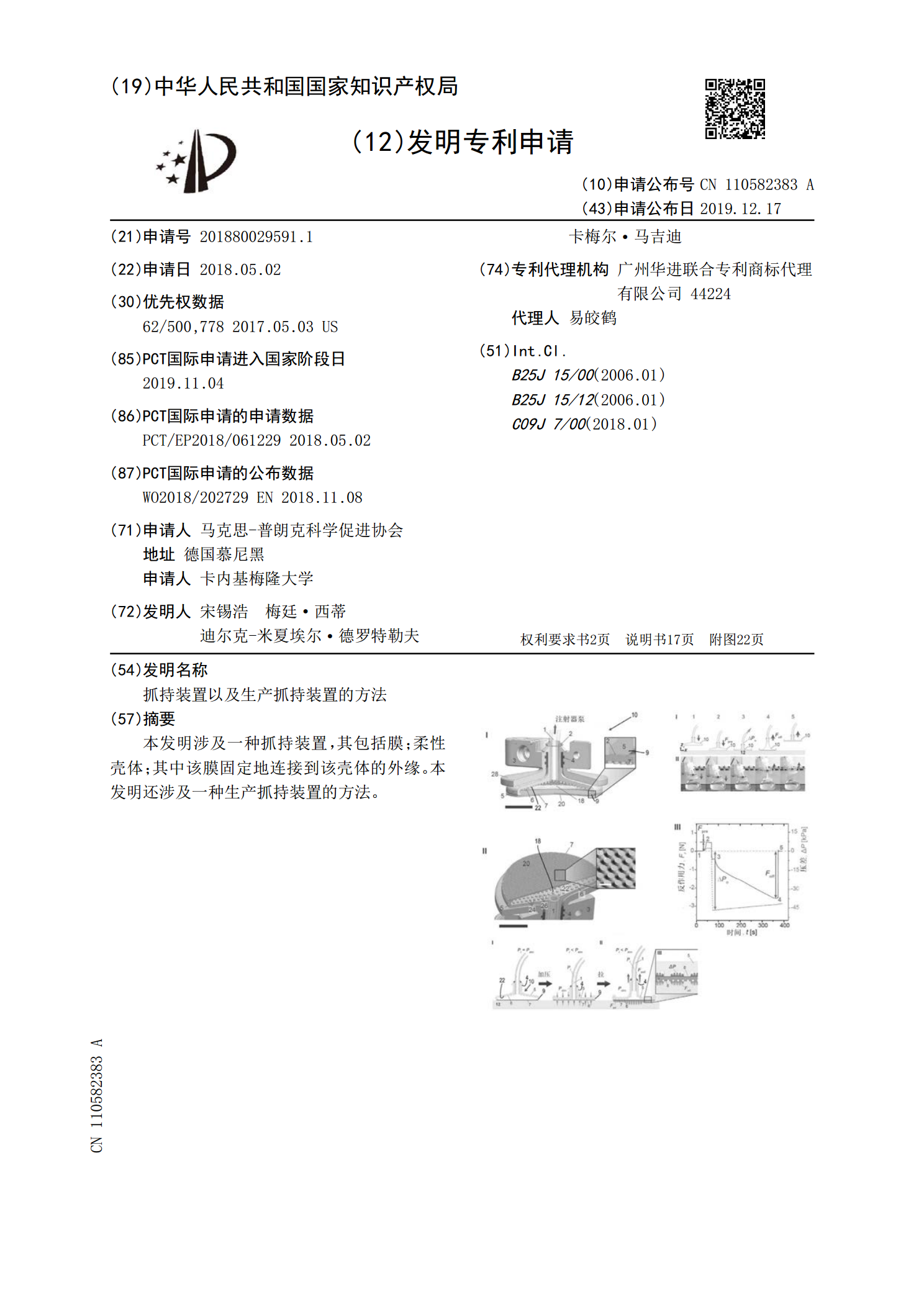
本发明涉及一种抓持装置,其包括膜;柔性壳体;其中该膜固定地连接到该壳体的外缘。本发明还涉及一种生产抓持装置的方法。
用于对象的抓持装置、具有抓持装置的充电机器人.pdf
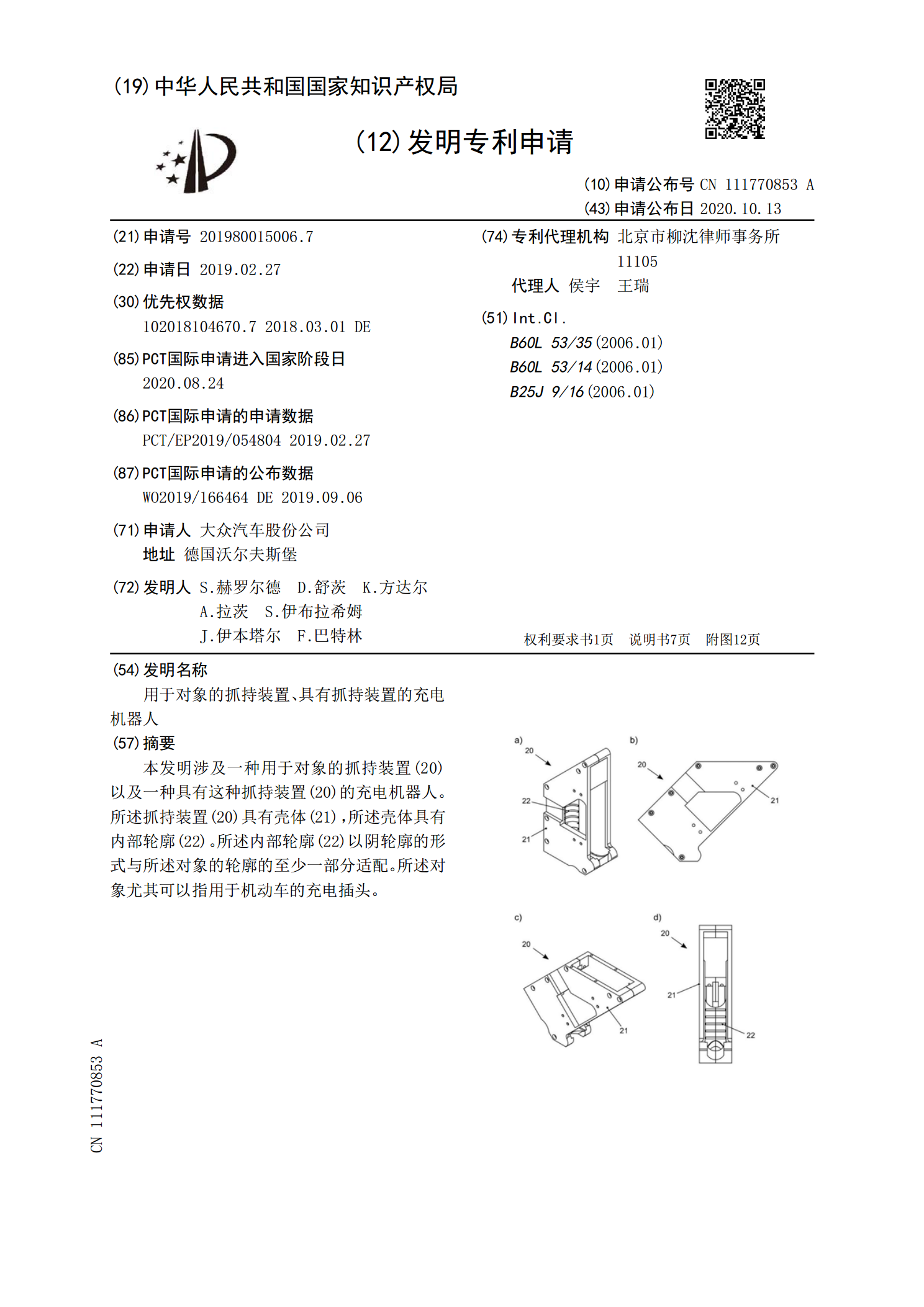
本发明涉及一种用于对象的抓持装置(20)以及一种具有这种抓持装置(20)的充电机器人。所述抓持装置(20)具有壳体(21),所述壳体具有内部轮廓(22)。所述内部轮廓(22)以阴轮廓的形式与所述对象的轮廓的至少一部分适配。所述对象尤其可以指用于机动车的充电插头。
轮胎抓持装置及轮胎检查装置.pdf
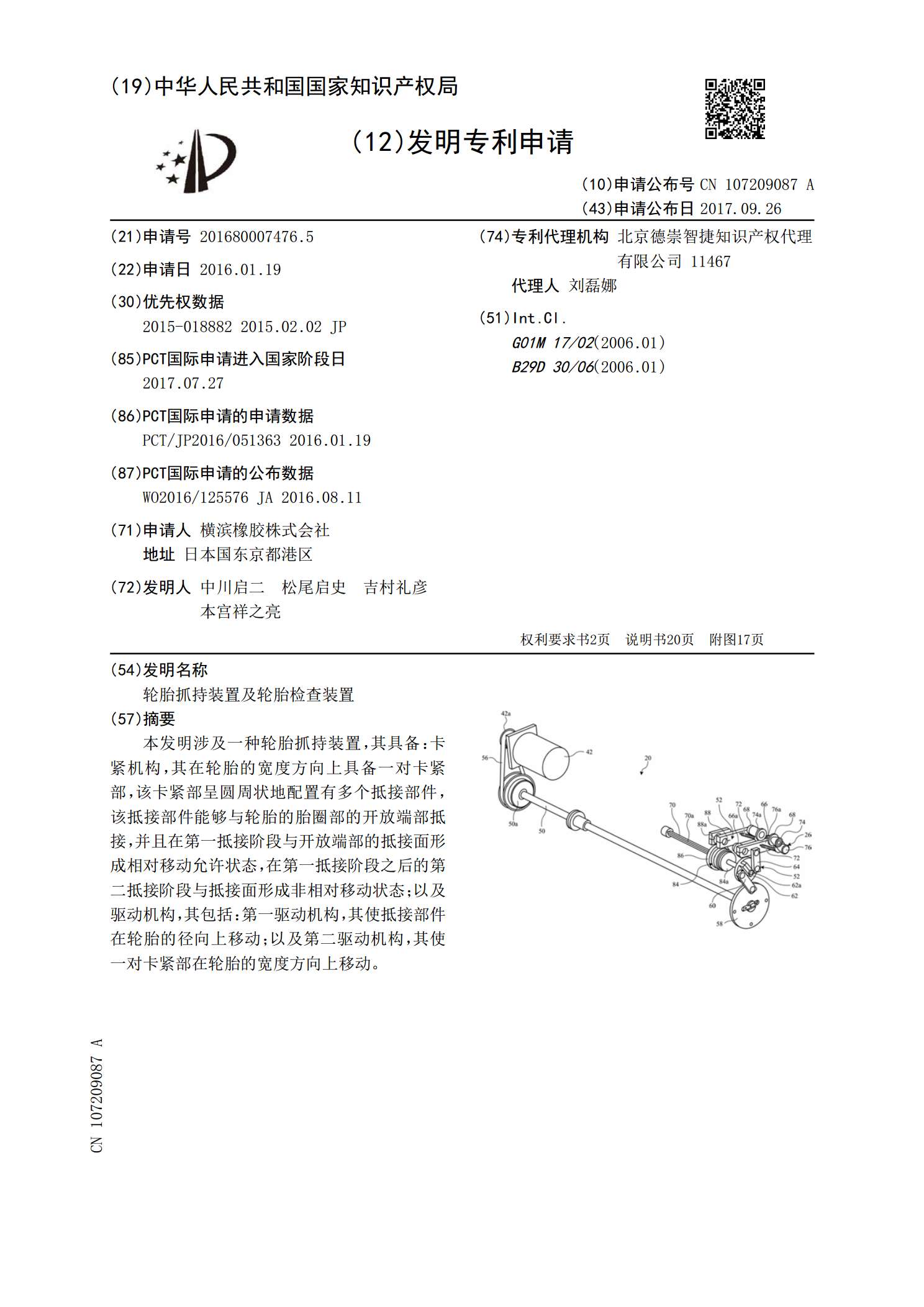
本发明涉及一种轮胎抓持装置,其具备:卡紧机构,其在轮胎的宽度方向上具备一对卡紧部,该卡紧部呈圆周状地配置有多个抵接部件,该抵接部件能够与轮胎的胎圈部的开放端部抵接,并且在第一抵接阶段与开放端部的抵接面形成相对移动允许状态,在第一抵接阶段之后的第二抵接阶段与抵接面形成非相对移动状态;以及驱动机构,其包括:第一驱动机构,其使抵接部件在轮胎的径向上移动;以及第二驱动机构,其使一对卡紧部在轮胎的宽度方向上移动。

铁磁板散开和抓持装置.pdf
用于从铁磁板材料的堆叠分离和抓持由铁磁材料制成的最外部的板的装置,包括:‑支架结构,具有用于将支架作为机械手臂末端工具(EOAT)附连到机械臂的安装件,该机械臂设置为用于使装置在邻近铁磁板的堆叠的侧部的操作位置和远离铁磁板的堆叠的远离位置之间运动和定位;‑磁性散开装置,安装在支架结构处并且具有可切换的磁体和能由磁体磁化具有相反的极性的成对散开极靴,所述散开极靴位于所述支架处,使得当在装置的操作位置中时,它们面向堆叠的板的侧部并且在至少该堆叠的最外部的板和在下方的板的厚度上延伸,由此,在磁体的开启状态中,由