
支撑装置、投影光学系统、曝光装置、物品制造方法及调整方法.pdf

茂学****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

支撑装置、投影光学系统、曝光装置、物品制造方法及调整方法.pdf
本发明提供支撑装置、投影光学系统、曝光装置、支撑装置的调整方法以及物品制造方法。支撑物体的支撑装置具备分别支撑上述物体的互不相同的部位的至少3个支撑机构。上述至少3个支撑机构分别包括:以在第1方向具有自由度的方式由第1平行板簧机构支撑的可动部;经由第2平行板簧机构而与上述可动部连接的输入部;调整上述输入部的位置的进给丝杠;中间体;将上述物体与上述中间体连结的第1弹性铰链;以及将上述中间体与上述可动部连结的第2弹性铰链。上述第2平行板簧机构的刚性低于上述第1平行板簧机构的刚性。

投影光学系统、曝光装置以及物品的制造方法.pdf
本发明涉及投影光学系统、曝光装置以及物品的制造方法。提供能够同时实现高规格化和良好的光学性能的投影光学系统。具有凹面镜以及凸面镜并且使位于物体面上的光轴外的照明区域的图案的像按照凹面镜、凸面镜、凹面镜的顺序反射而投影到像面的投影光学系统具备配置于凹面镜与凸面镜之间的光路上的透镜群,所述透镜群包括具有第1非球面的第1透镜和配置于第1透镜与凸面镜之间并且具有第2非球面的第2透镜,在第1透镜的第1非球面中,在将第1非球面的位置Pcr、位置Psm处的光焦度分别设为<base:Imagehe=@51@wi=@244

曝光装置和物品制造方法.pdf
本发明公开了曝光装置和物品制造方法。提供了一种曝光装置,该曝光装置执行在交换基板的同时曝光多个基板中的各个基板的作业处理。该装置包括被配置为保持基板的基板保持器以及被配置为控制作业处理的控制器。控制器基于作业处理的经过时间与基板变形量之间的关系来校正由于基板的变形而生成的重叠误差,并曝光基板。在该关系中,在基板交换时输送到基板保持器的基板被赋予初始变形量,该初始变形量与基板保持器在基板交换时的残留热量对应。
收纳装置、曝光装置以及物品制造方法.pdf
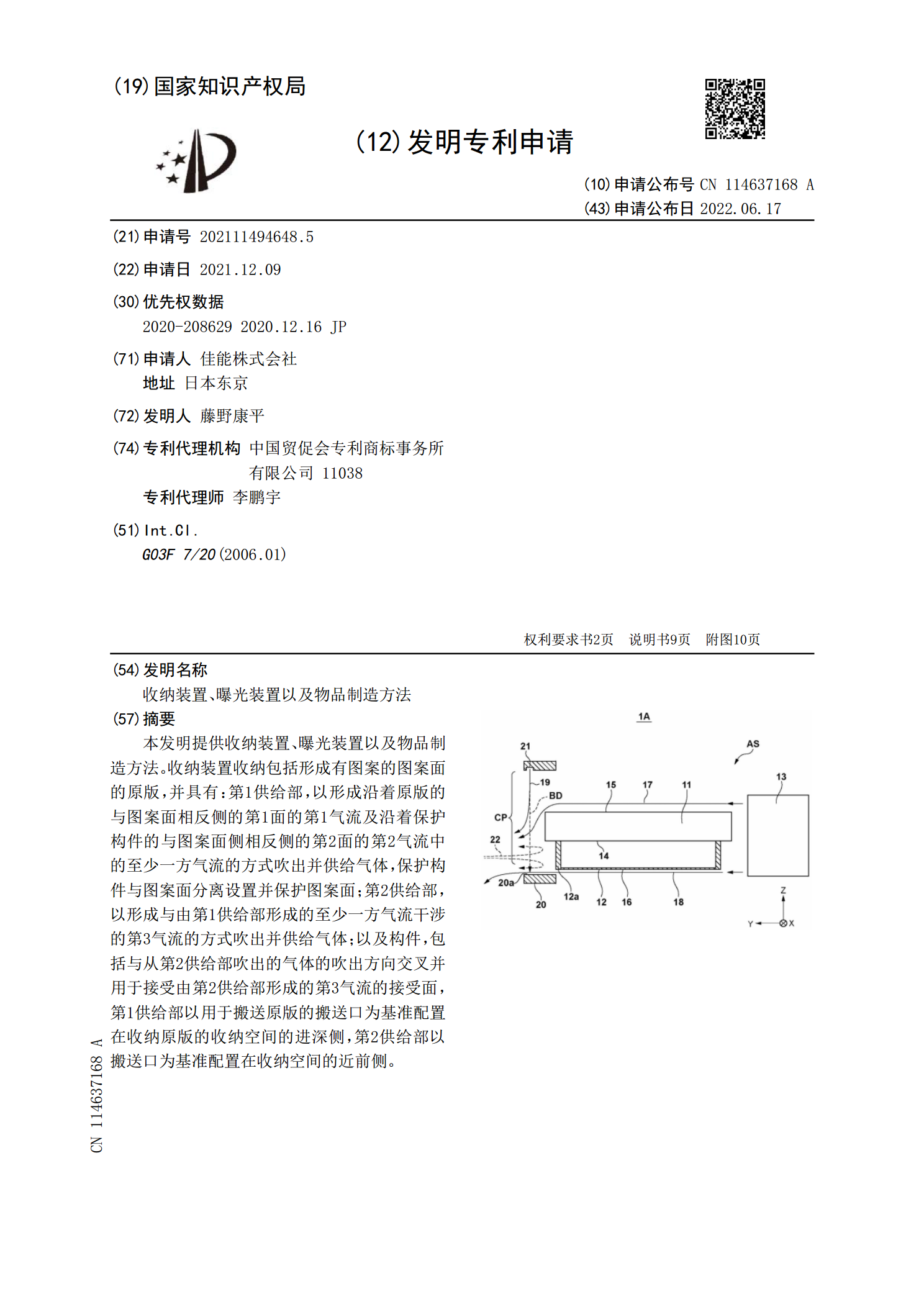
本发明提供收纳装置、曝光装置以及物品制造方法。收纳装置收纳包括形成有图案的图案面的原版,并具有:第1供给部,以形成沿着原版的与图案面相反侧的第1面的第1气流及沿着保护构件的与图案面侧相反侧的第2面的第2气流中的至少一方气流的方式吹出并供给气体,保护构件与图案面分离设置并保护图案面;第2供给部,以形成与由第1供给部形成的至少一方气流干涉的第3气流的方式吹出并供给气体;以及构件,包括与从第2供给部吹出的气体的吹出方向交叉并用于接受由第2供给部形成的第3气流的接受面,第1供给部以用于搬送原版的搬送口为基准配置在

收纳装置、曝光装置以及物品制造方法.pdf
本发明提供收纳装置、曝光装置以及物品制造方法。收纳装置收纳包括形成有图案的图案面的原版,并具有:第1供给部,以形成沿着原版的与图案面相反侧的第1面的第1气流及沿着保护构件的与图案面侧相反侧的第2面的第2气流中的至少一方气流的方式吹出并供给气体,保护构件与图案面分离设置并保护图案面;第2供给部,以形成与由第1供给部形成的至少一方气流干涉的第3气流的方式吹出并供给气体;以及构件,包括与从第2供给部吹出的气体的吹出方向交叉并用于接受由第2供给部形成的第3气流的接受面,第1供给部以用于搬送原版的搬送口为基准配置在