
一种异形管道内壁激光清洗机器人及方法.pdf

念珊****写意

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种异形管道内壁激光清洗机器人及方法.pdf
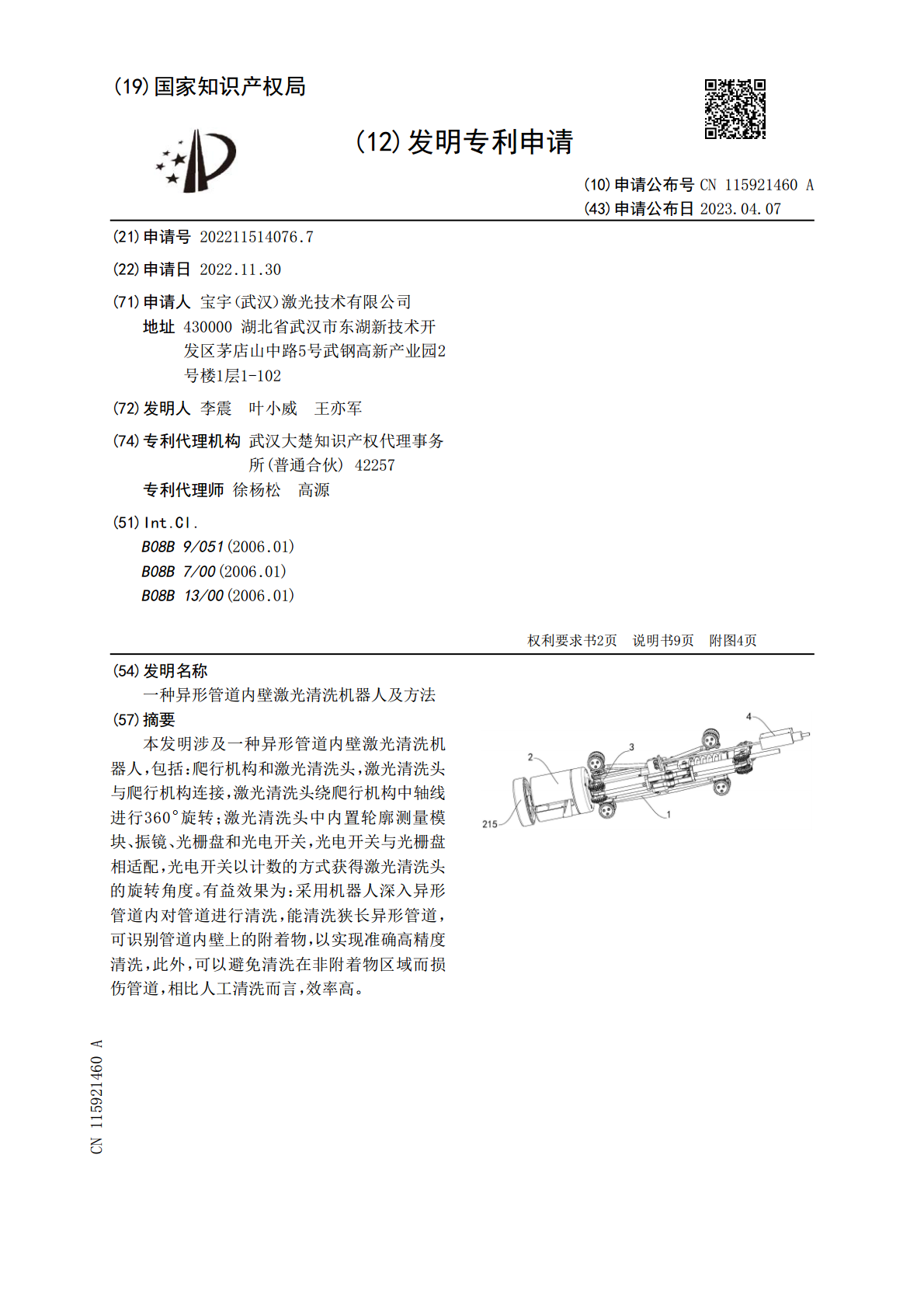
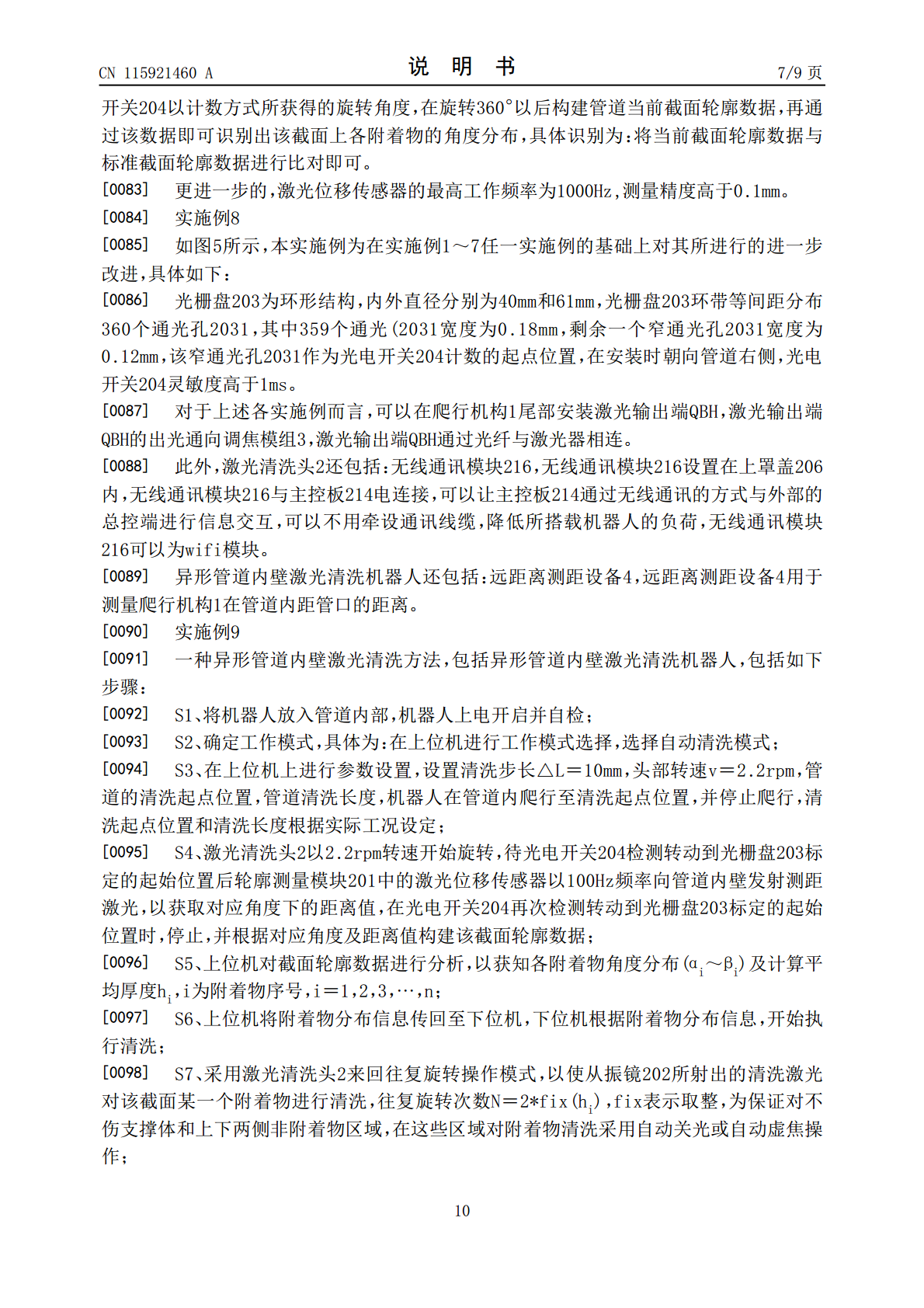
本发明涉及一种异形管道内壁激光清洗机器人,包括:爬行机构和激光清洗头,激光清洗头与爬行机构连接,激光清洗头绕爬行机构中轴线进行360°旋转;激光清洗头中内置轮廓测量模块、振镜、光栅盘和光电开关,光电开关与光栅盘相适配,光电开关以计数的方式获得激光清洗头的旋转角度。有益效果为:采用机器人深入异形管道内对管道进行清洗,能清洗狭长异形管道,可识别管道内壁上的附着物,以实现准确高精度清洗,此外,可以避免清洗在非附着物区域而损伤管道,相比人工清洗而言,效率高。
一种管道内壁的激光清洗方法及清洗装置.pdf
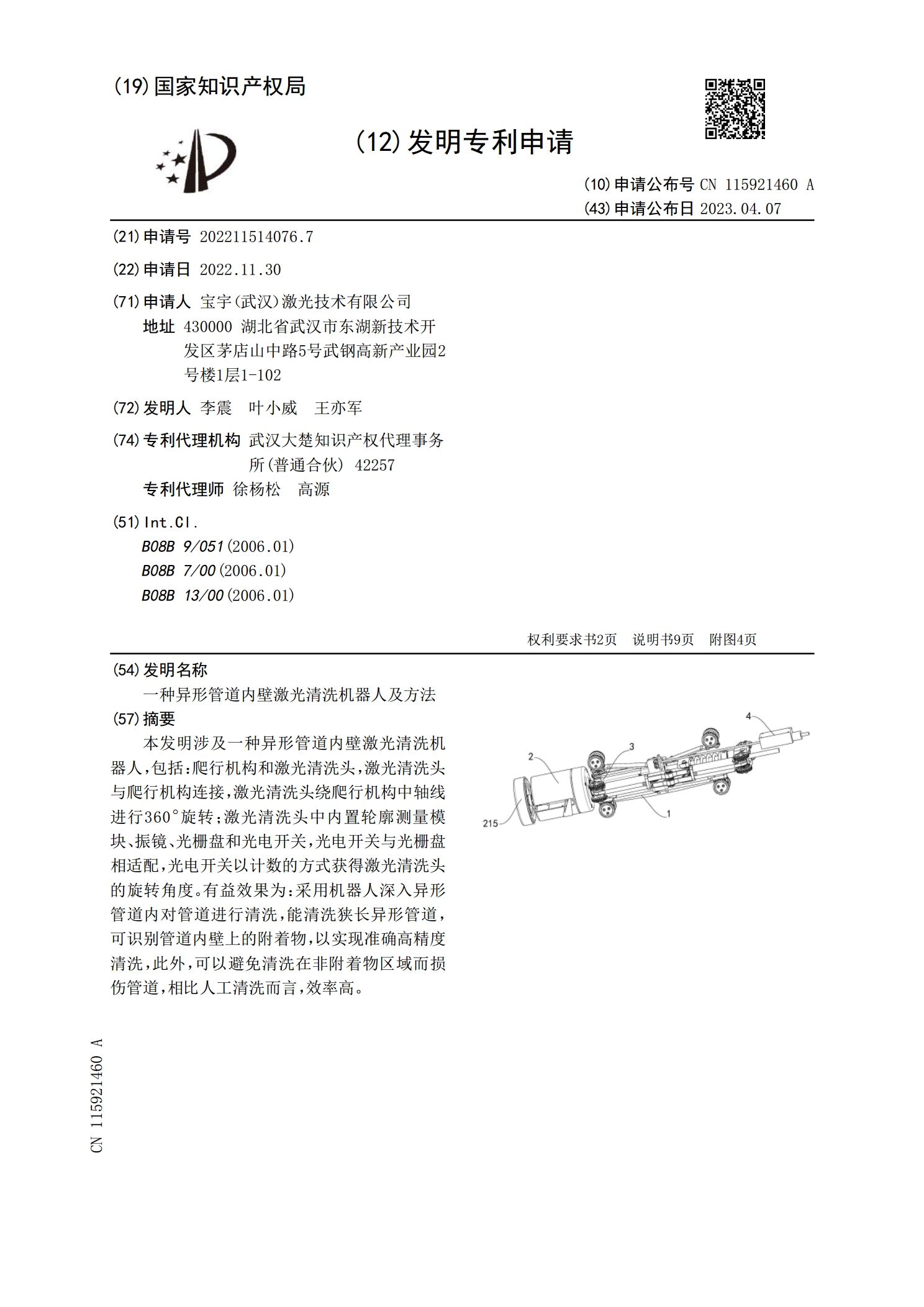
本发明提供了一种管道内壁的激光清洗方法及清洗装置,包括:将管道放置在支撑平台的导轮上;通过水平轴向调节模块使得镜头支撑管深入到所述管道内部,通过高度调节模块调节所述镜头支撑管的高度,使得设置在所述镜头支撑管上的激光镜头的焦点作用在所述管道的内壁;开启所述激光镜头,通过所述导轮控制所述管道的旋转,通过所述水平轴向调节模块控制所述激光镜头沿所述管道的轴向移动,从而清洗所述管道的内壁。通过管道的旋转运动配合激光镜头的轴向与径向移动的方式,实现对不同内径的管道内壁清洗。
一种用于管道内壁的激光清洗头.pdf
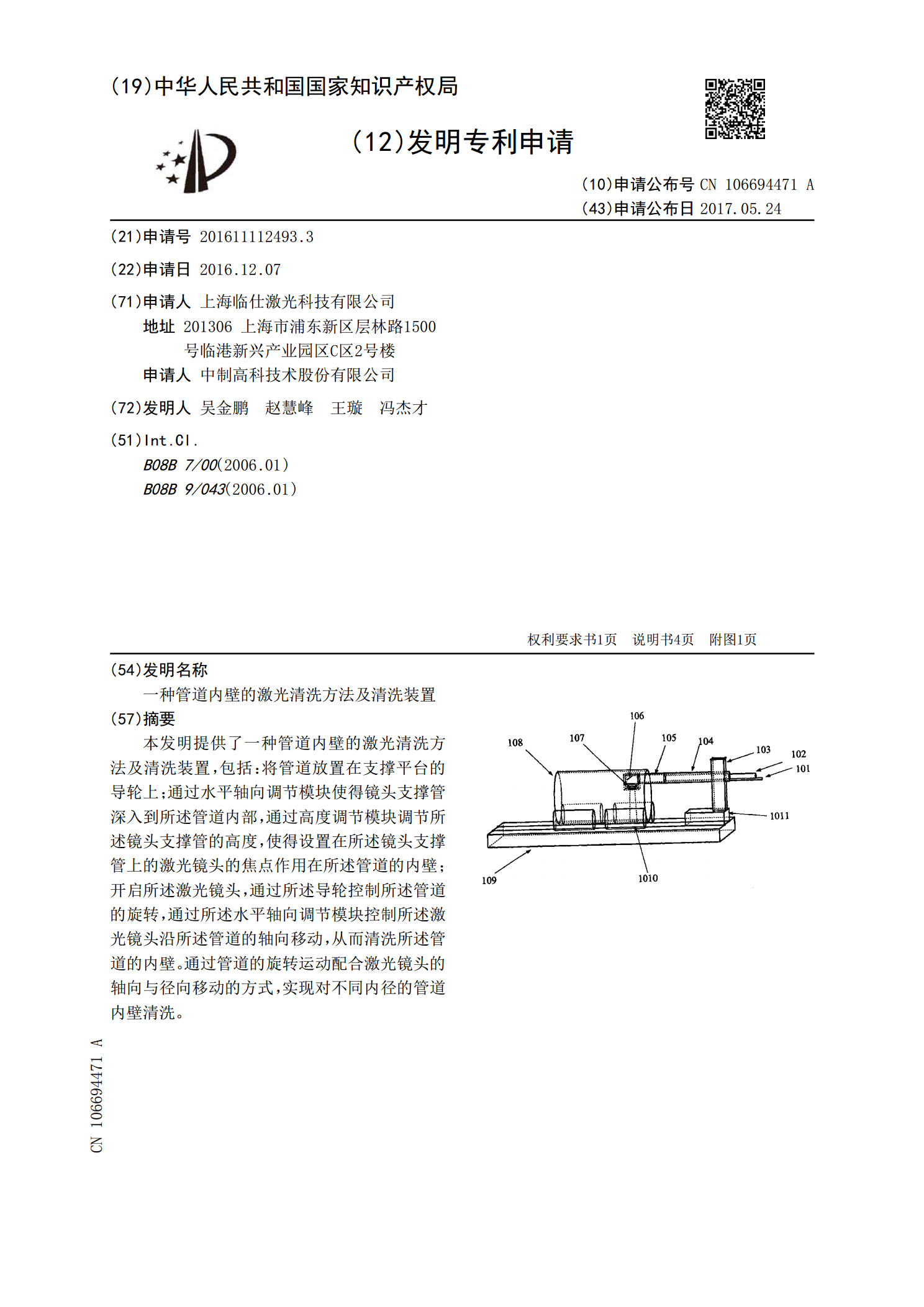
一种用于管道内壁的激光清洗头,包括位于管道外部的隔离头与位于管道内部的清洗头,隔离头发出的激光光束的轴线与管道的轴线重合,清洗头包括沿管道的轴线方向依次连接的镜筒、连接座、前支座、后支座,镜筒内设置有聚焦透镜与反射镜座,反射镜座上倾斜设置有反射镜,连接座内设置有与反射镜座相连接的一号旋转电机,前支座内设置有与一号旋转电机相连接的直线电机,后支座内设置有相连接的二号旋转电机与蜗杆,前支座内沿圆周方向均匀设置有三个与蜗杆相配合的涡轮,沿后支座圆周方向120度均匀设置有三个驱动轮,驱动轮通过同步带与涡轮传动连接

一种管道内壁清洗机器人.pdf
本发明公开一种管道内壁清洗机器人,通过三个均匀分布的可调半径主动轮行走部分带动机器在管道内壁行走,通过前部的高速旋转清洗部分对管道内壁进行旋转清洗,尾部的可调角度支撑牵引组则提供支撑的同时,保证机器人在前进过程中遇到弯管可以为主机身提供尾部支撑,减小冲击力,增大缓冲。通过调节机器人驱动电机的速率实现机器人前进的速度,以及前部旋转清洗部件的速度,以实现对厚度和粘度不同管道内壁附着污垢的清理。
一种管道内壁清洗机器人.pdf
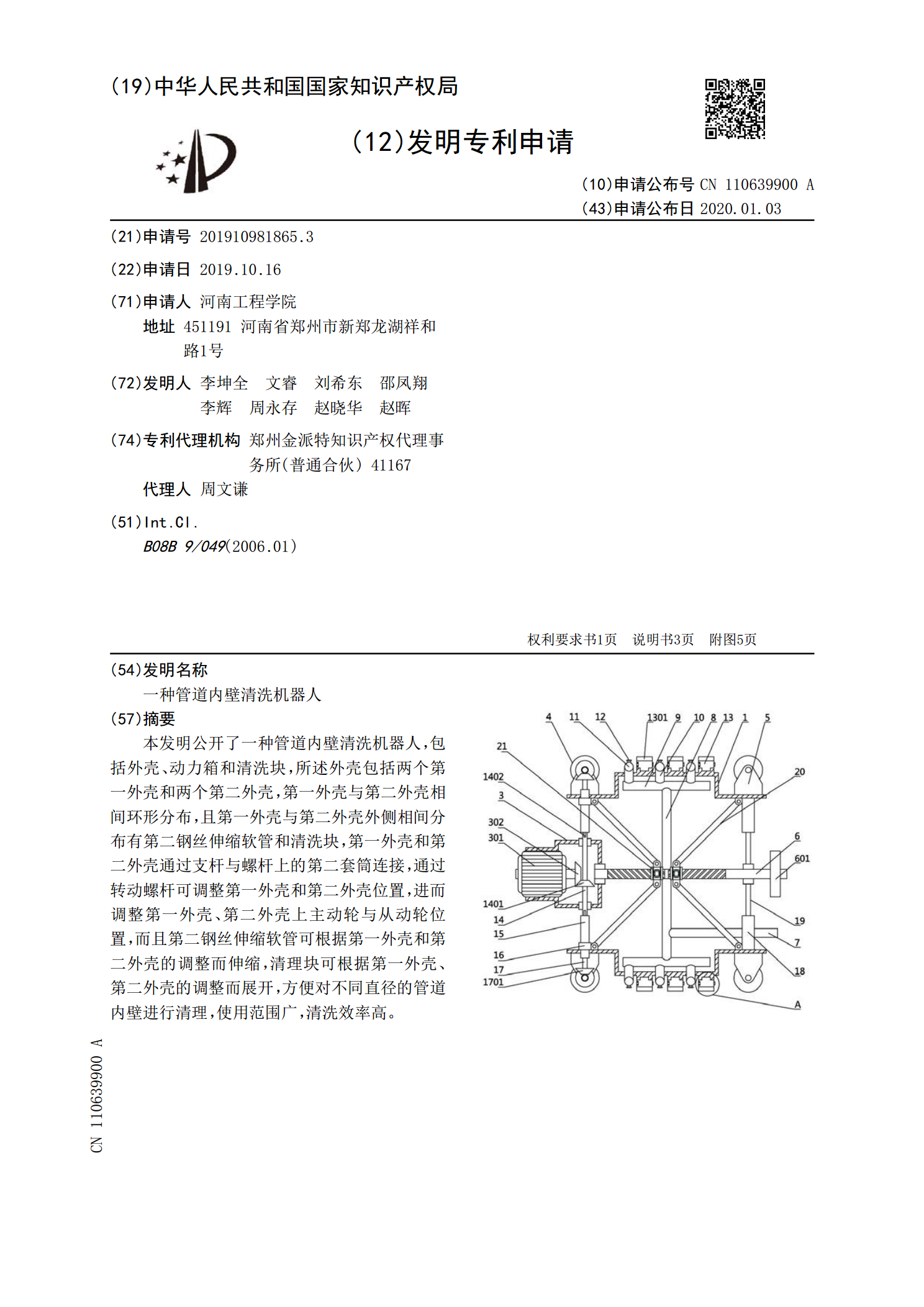
本发明公开了一种管道内壁清洗机器人,包括外壳、动力箱和清洗块,所述外壳包括两个第一外壳和两个第二外壳,第一外壳与第二外壳相间环形分布,且第一外壳与第二外壳外侧相间分布有第二钢丝伸缩软管和清洗块,第一外壳和第二外壳通过支杆与螺杆上的第二套筒连接,通过转动螺杆可调整第一外壳和第二外壳位置,进而调整第一外壳、第二外壳上主动轮与从动轮位置,而且第二钢丝伸缩软管可根据第一外壳和第二外壳的调整而伸缩,清理块可根据第一外壳、第二外壳的调整而展开,方便对不同直径的管道内壁进行清理,使用范围广,清洗效率高。