
一种用于关节型机械臂姿态调整机构.pdf

努力****幻翠

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于关节型机械臂姿态调整机构.pdf
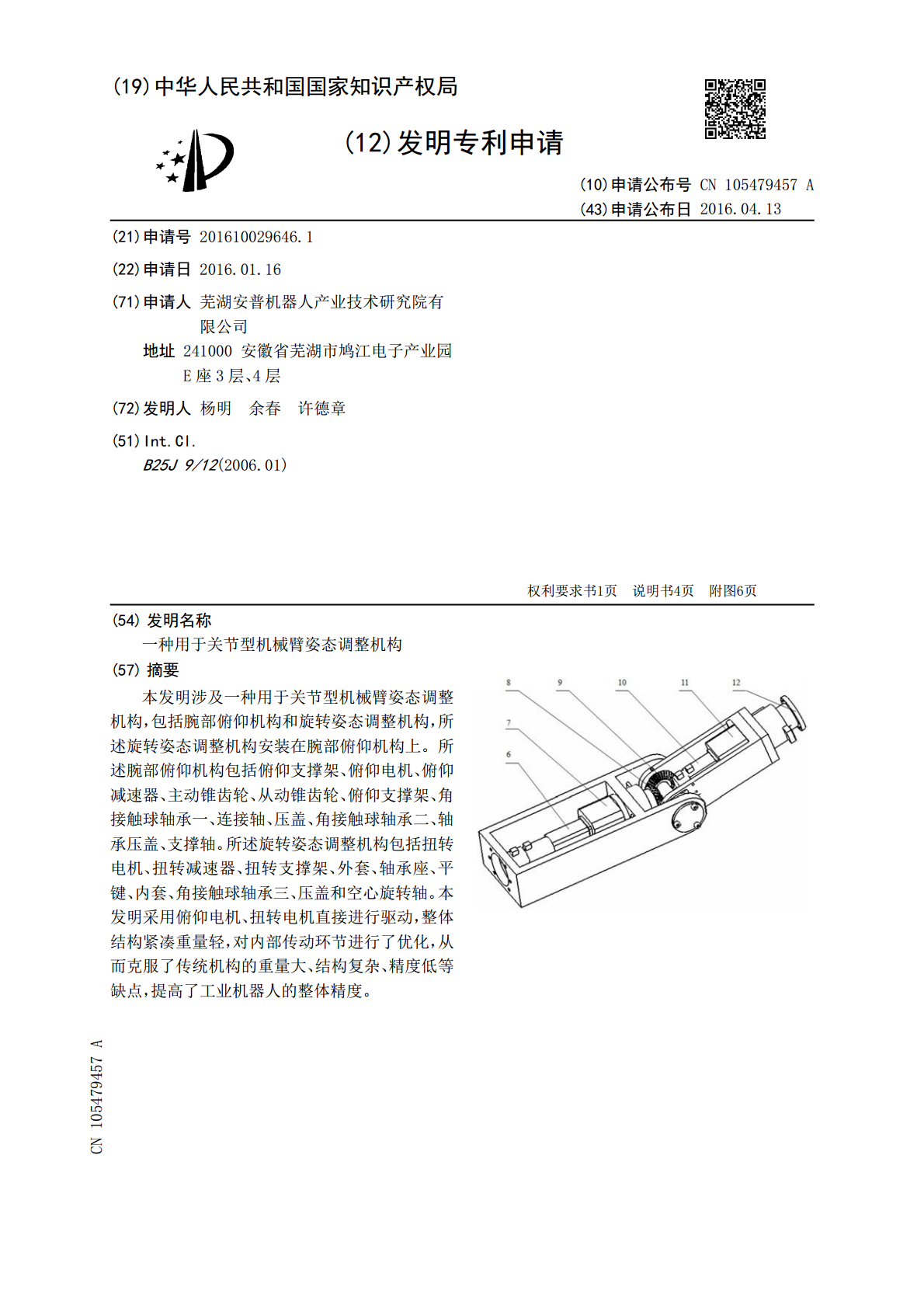
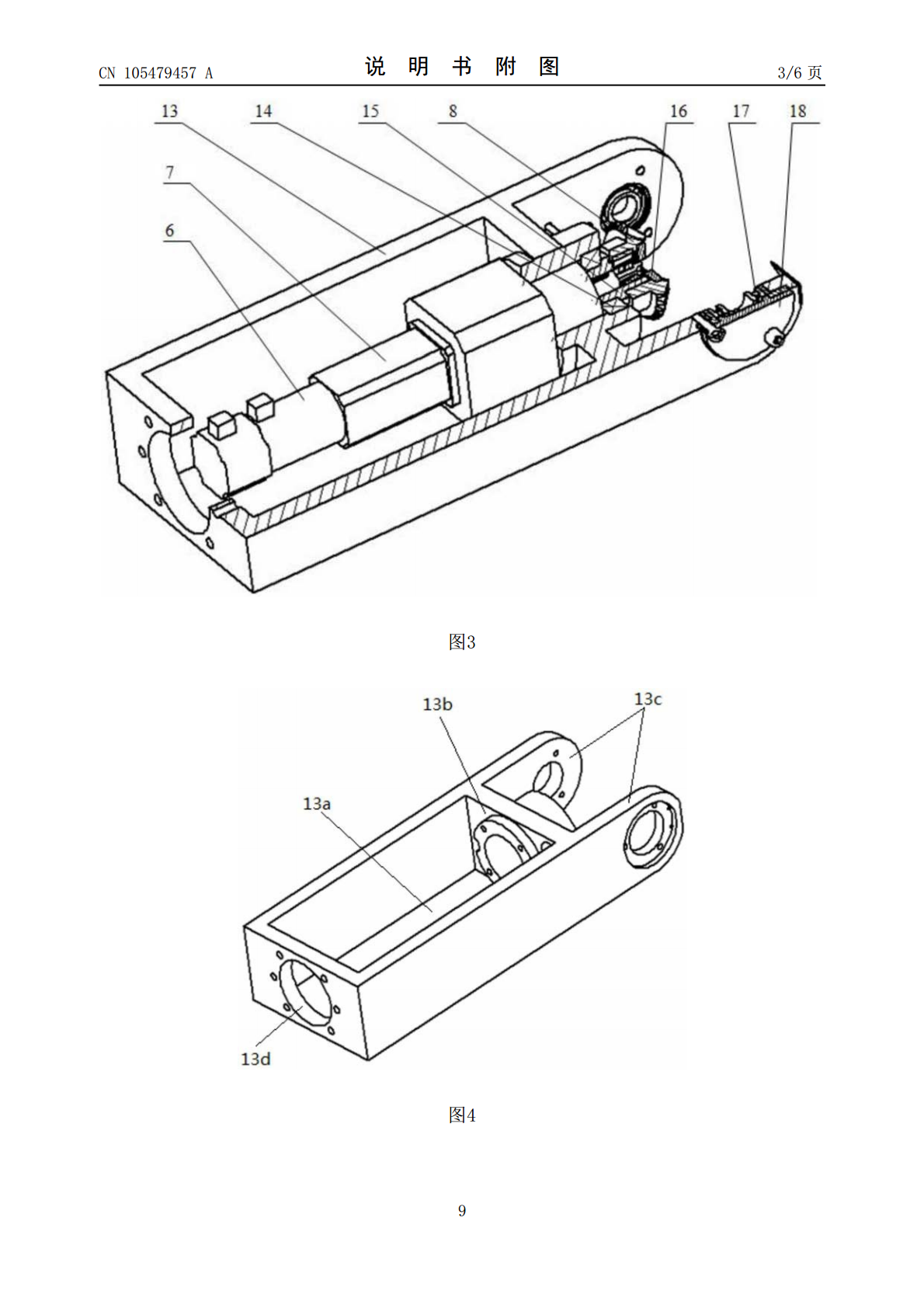
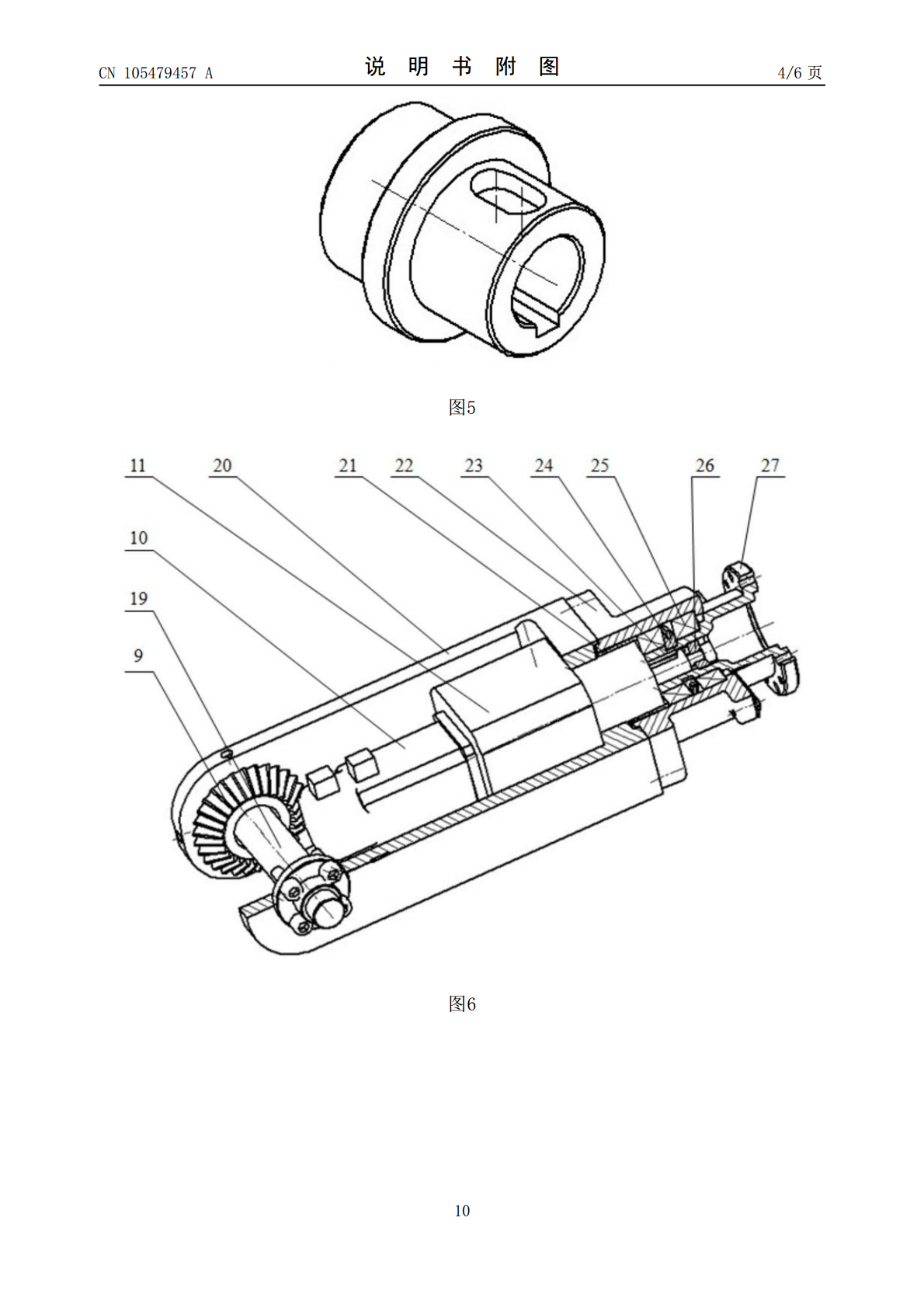
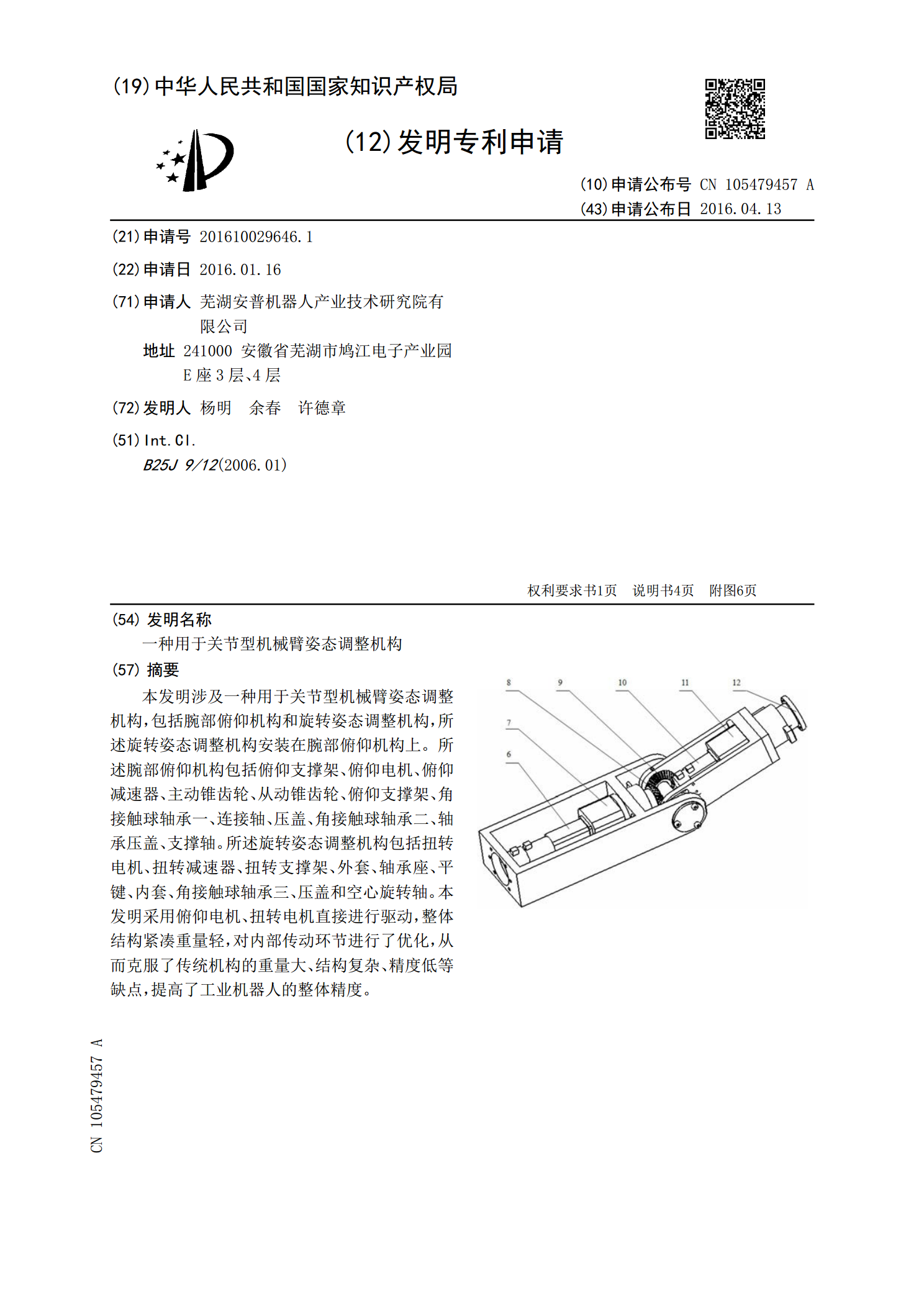
本发明涉及一种用于关节型机械臂姿态调整机构,包括腕部俯仰机构和旋转姿态调整机构,所述旋转姿态调整机构安装在腕部俯仰机构上。所述腕部俯仰机构包括俯仰支撑架、俯仰电机、俯仰减速器、主动锥齿轮、从动锥齿轮、俯仰支撑架、角接触球轴承一、连接轴、压盖、角接触球轴承二、轴承压盖、支撑轴。所述旋转姿态调整机构包括扭转电机、扭转减速器、扭转支撑架、外套、轴承座、平键、内套、角接触球轴承三、压盖和空心旋转轴。本发明采用俯仰电机、扭转电机直接进行驱动,整体结构紧凑重量轻,对内部传动环节进行了优化,从而克服了传统机构的重量大、
一种姿态调整机械臂.pdf
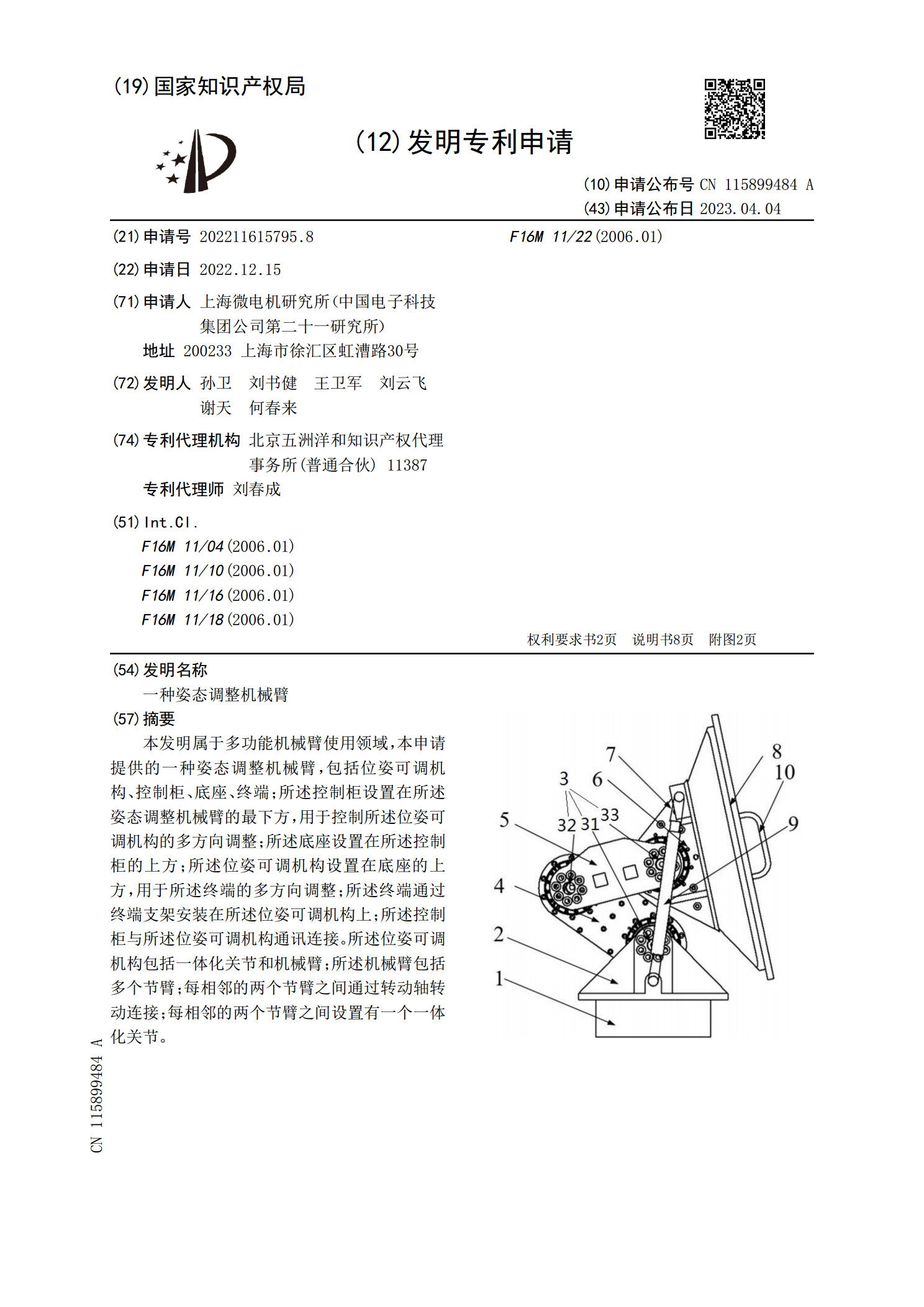
本发明属于多功能机械臂使用领域,本申请提供的一种姿态调整机械臂,包括位姿可调机构、控制柜、底座、终端;所述控制柜设置在所述姿态调整机械臂的最下方,用于控制所述位姿可调机构的多方向调整;所述底座设置在所述控制柜的上方;所述位姿可调机构设置在底座的上方,用于所述终端的多方向调整;所述终端通过终端支架安装在所述位姿可调机构上;所述控制柜与所述位姿可调机构通讯连接。所述位姿可调机构包括一体化关节和机械臂;所述机械臂包括多个节臂;每相邻的两个节臂之间通过转动轴转动连接;每相邻的两个节臂之间设置有一个一体化关节。

一种具有姿态调整机构的关节履带.pdf
本发明涉及履带车辆或履带式移动机器人的一种移动机构,一种具有姿态调整机构的关节履带,在大轮旋转轴(17)和驱动空心轴(26)之间,套置一端有链盘的姿态调整空心轴(28),三轴同轴线可相互转动;姿态调整空心轴(28)的插入端经扭矩减震机构连接杆形摆臂(13),摆臂(13)的另一端转动连接小轮(2);所述摆臂(13)的长度方向与大轮(14)和小轮(2)轴线的连线一致;履带总成具有接地角度调整功能,可跨越障碍适应复杂的路面环境,可实现履带接地角度的主动调整,具有较好仿地形能力,提高履带地面附着力,衰减履带前端受
一种用于冗余机械臂关节的省力驱动机构.pdf
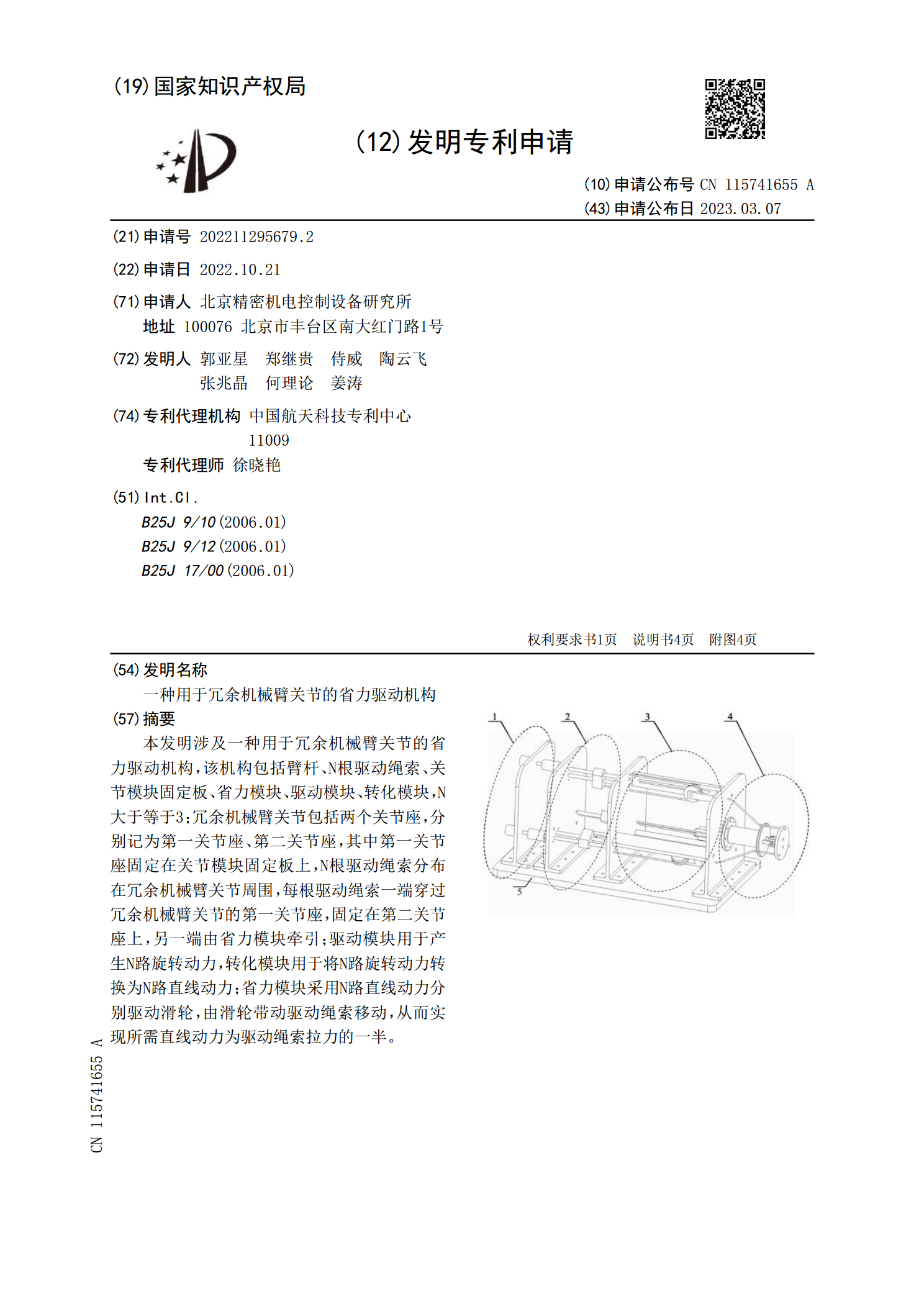
本发明涉及一种用于冗余机械臂关节的省力驱动机构,该机构包括臂杆、N根驱动绳索、关节模块固定板、省力模块、驱动模块、转化模块,N大于等于3;冗余机械臂关节包括两个关节座,分别记为第一关节座、第二关节座,其中第一关节座固定在关节模块固定板上,N根驱动绳索分布在冗余机械臂关节周围,每根驱动绳索一端穿过冗余机械臂关节的第一关节座,固定在第二关节座上,另一端由省力模块牵引;驱动模块用于产生N路旋转动力,转化模块用于将N路旋转动力转换为N路直线动力;省力模块采用N路直线动力分别驱动滑轮,由滑轮带动驱动绳索移动,从而实

一种机械臂末端姿态调整方法及装置.pdf
本申请公开了一种机械臂末端姿态调整方法及装置,应用于智能机器人,所述智能机器人包括基座和机械臂,所述方法包括:在预先设定的情况下,获取所述机械臂末端在基座坐标系O