
一种用于冗余机械臂关节的省力驱动机构.pdf

An****70

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于冗余机械臂关节的省力驱动机构.pdf
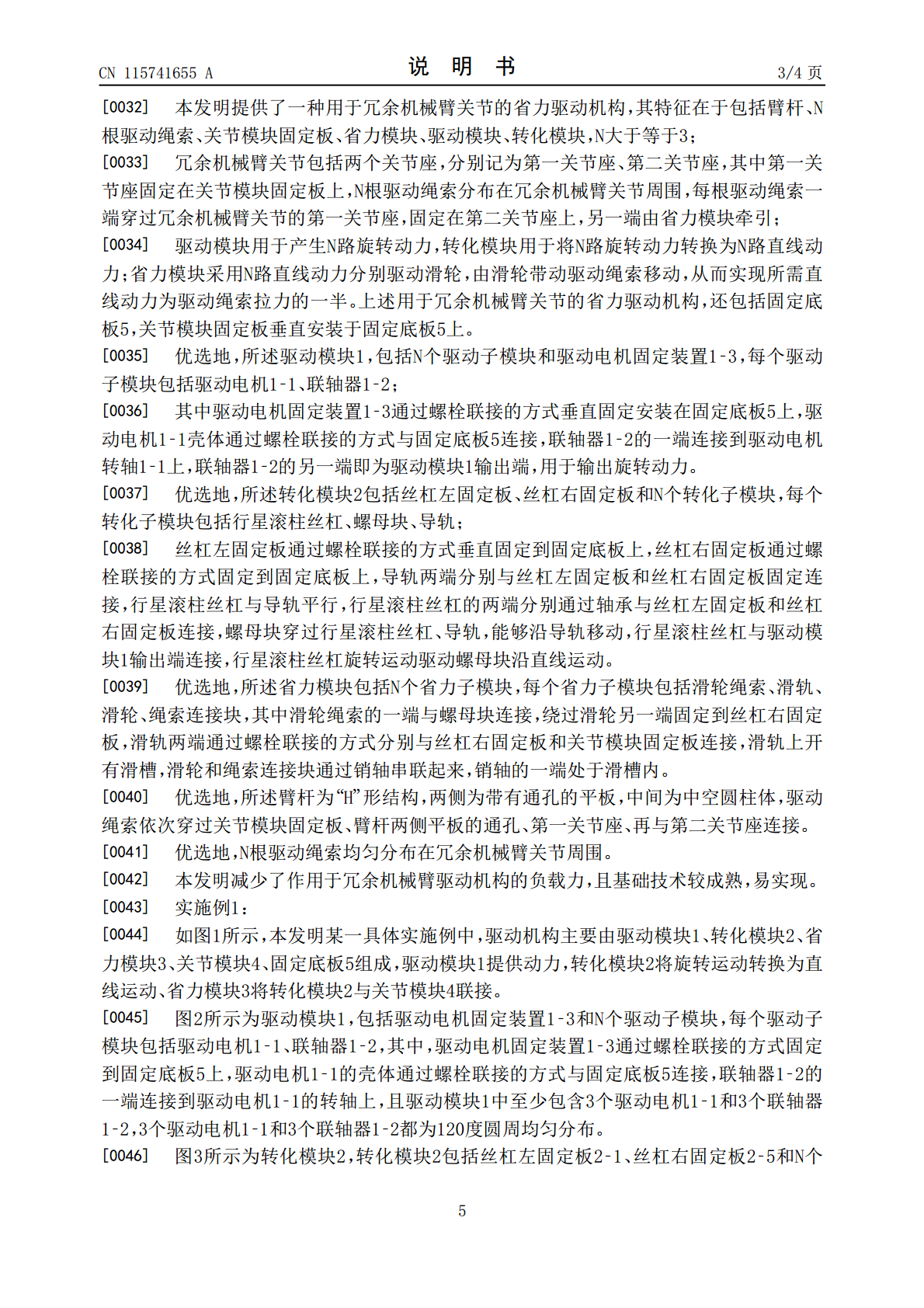
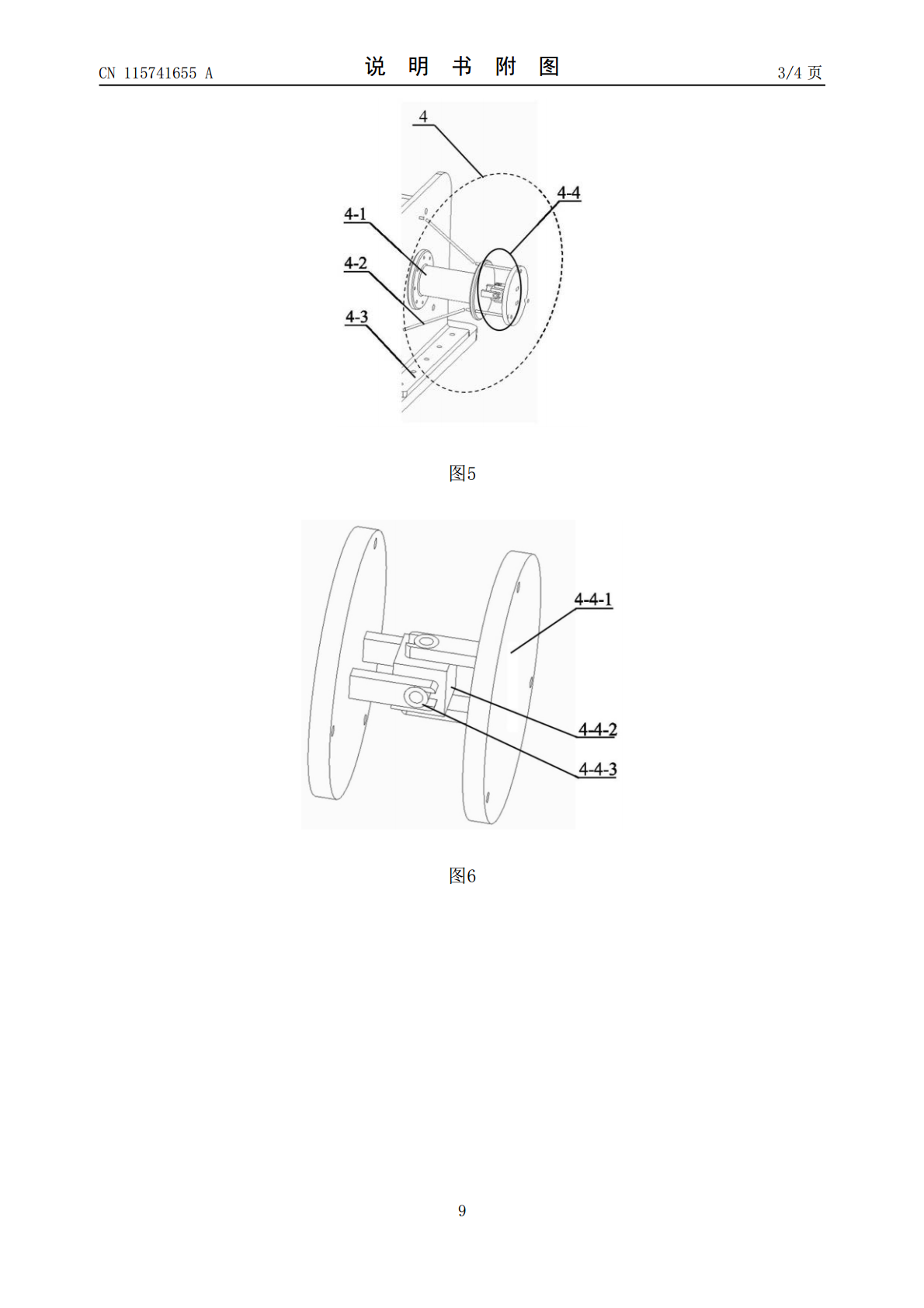
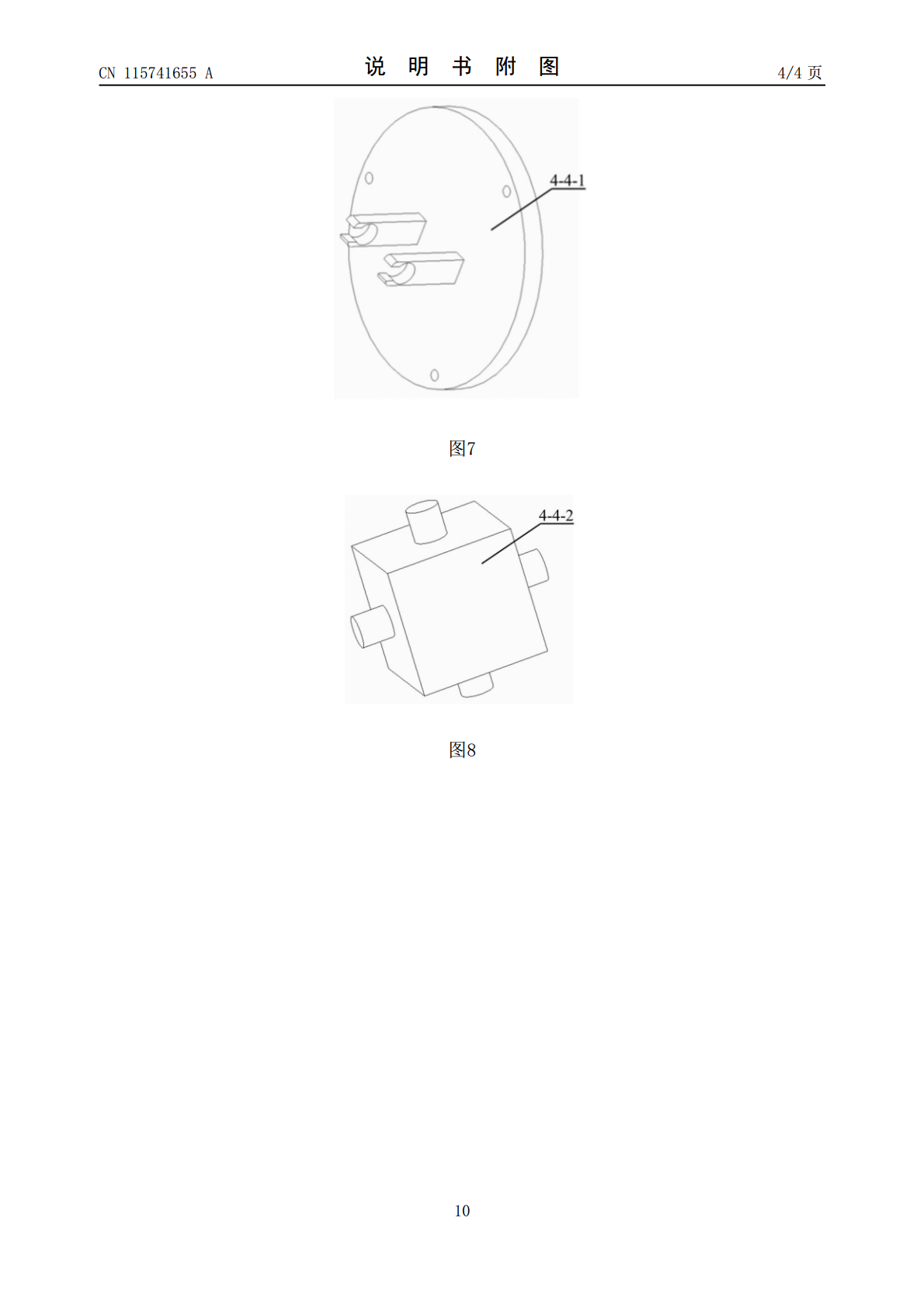
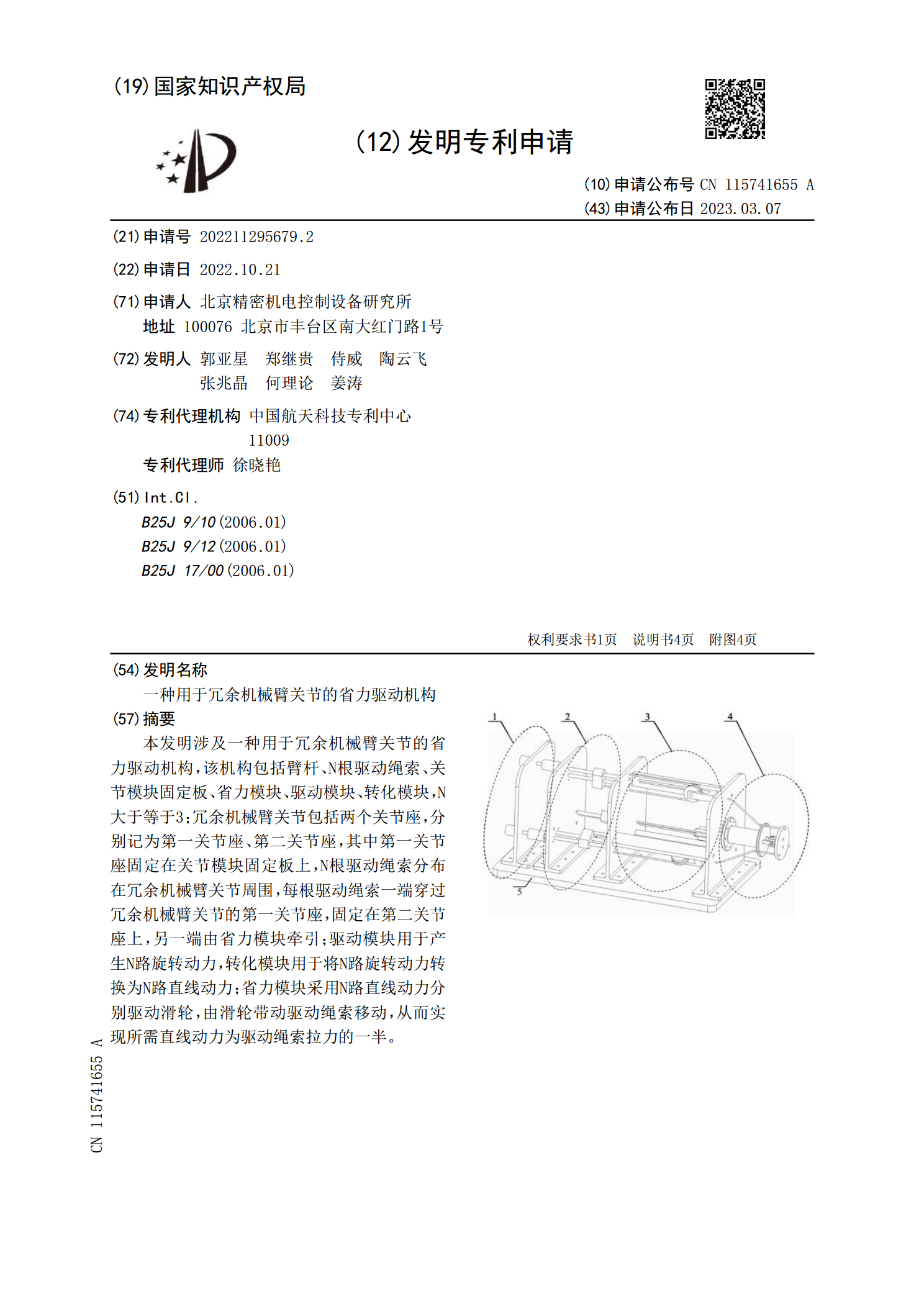
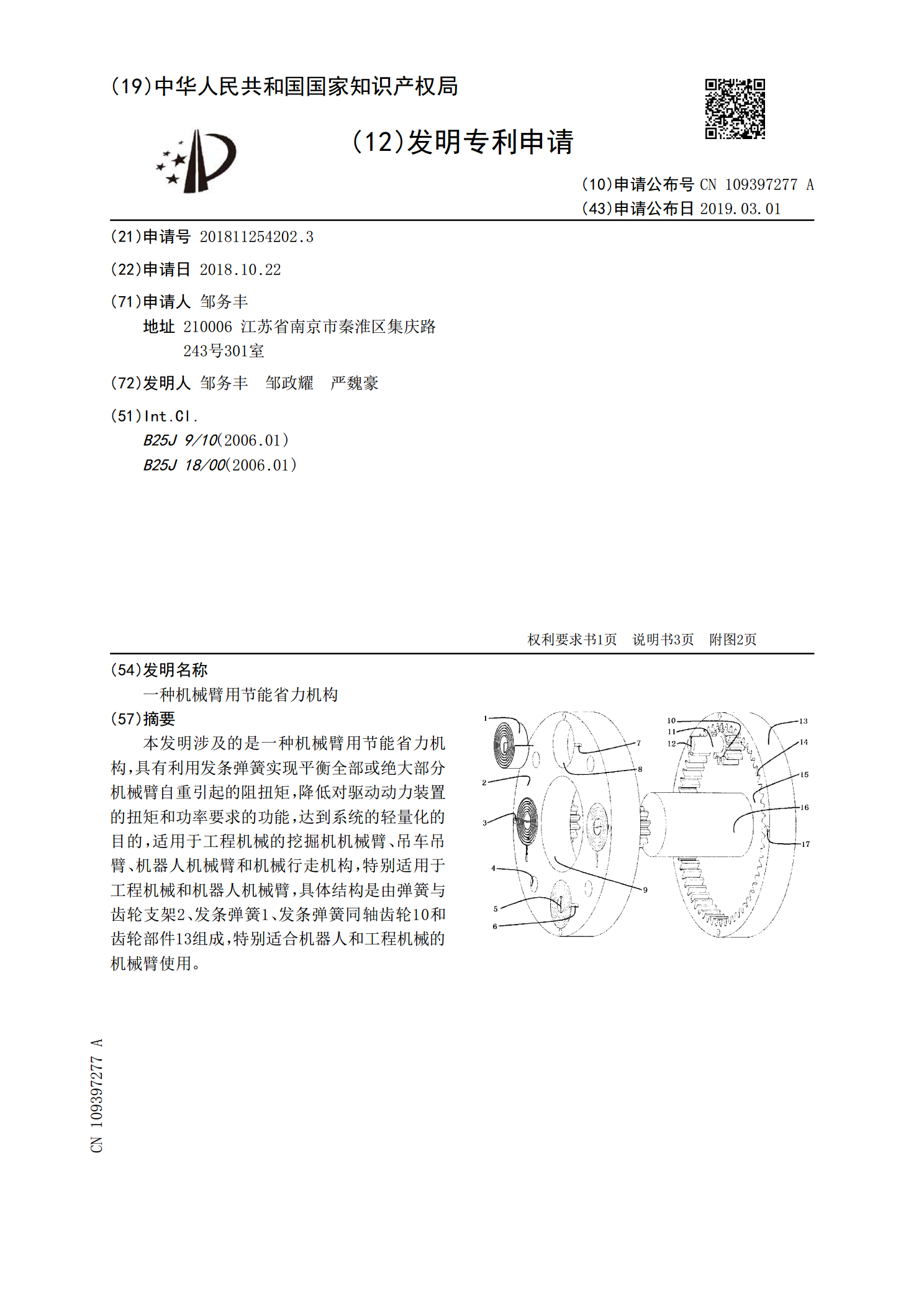
本发明涉及一种用于冗余机械臂关节的省力驱动机构,该机构包括臂杆、N根驱动绳索、关节模块固定板、省力模块、驱动模块、转化模块,N大于等于3;冗余机械臂关节包括两个关节座,分别记为第一关节座、第二关节座,其中第一关节座固定在关节模块固定板上,N根驱动绳索分布在冗余机械臂关节周围,每根驱动绳索一端穿过冗余机械臂关节的第一关节座,固定在第二关节座上,另一端由省力模块牵引;驱动模块用于产生N路旋转动力,转化模块用于将N路旋转动力转换为N路直线动力;省力模块采用N路直线动力分别驱动滑轮,由滑轮带动驱动绳索移动,从而实
一种机械臂用节能省力机构.pdf
本发明涉及的是一种机械臂用节能省力机构,具有利用发条弹簧实现平衡全部或绝大部分机械臂自重引起的阻扭矩,降低对驱动动力装置的扭矩和功率要求的功能,达到系统的轻量化的目的,适用于工程机械的挖掘机机械臂、吊车吊臂、机器人机械臂和机械行走机构,特别适用于工程机械和机器人机械臂,具体结构是由弹簧与齿轮支架2、发条弹簧1、发条弹簧同轴齿轮10和齿轮部件13组成,特别适合机器人和工程机械的机械臂使用。
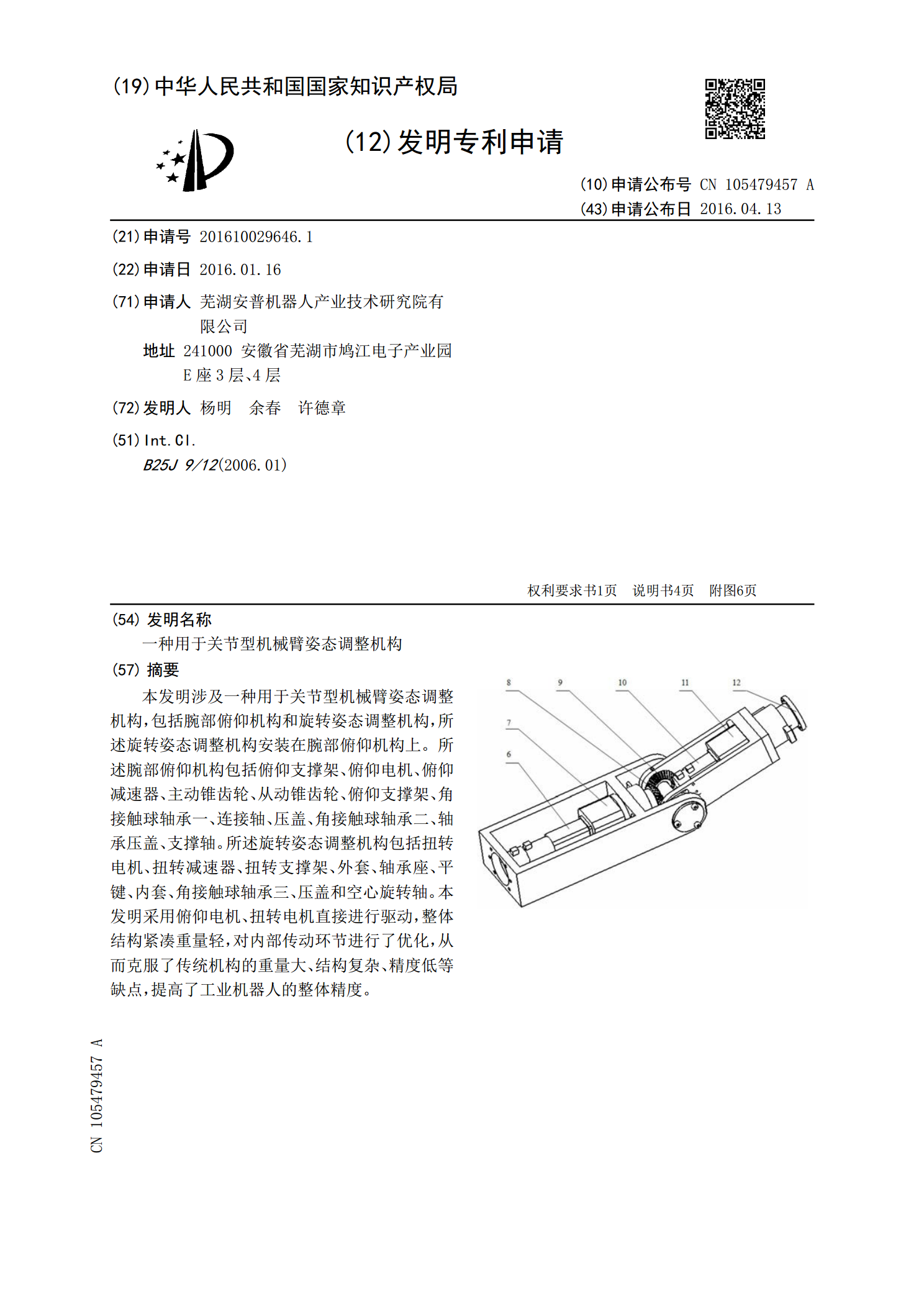
一种用于关节型机械臂姿态调整机构.pdf
本发明涉及一种用于关节型机械臂姿态调整机构,包括腕部俯仰机构和旋转姿态调整机构,所述旋转姿态调整机构安装在腕部俯仰机构上。所述腕部俯仰机构包括俯仰支撑架、俯仰电机、俯仰减速器、主动锥齿轮、从动锥齿轮、俯仰支撑架、角接触球轴承一、连接轴、压盖、角接触球轴承二、轴承压盖、支撑轴。所述旋转姿态调整机构包括扭转电机、扭转减速器、扭转支撑架、外套、轴承座、平键、内套、角接触球轴承三、压盖和空心旋转轴。本发明采用俯仰电机、扭转电机直接进行驱动,整体结构紧凑重量轻,对内部传动环节进行了优化,从而克服了传统机构的重量大、
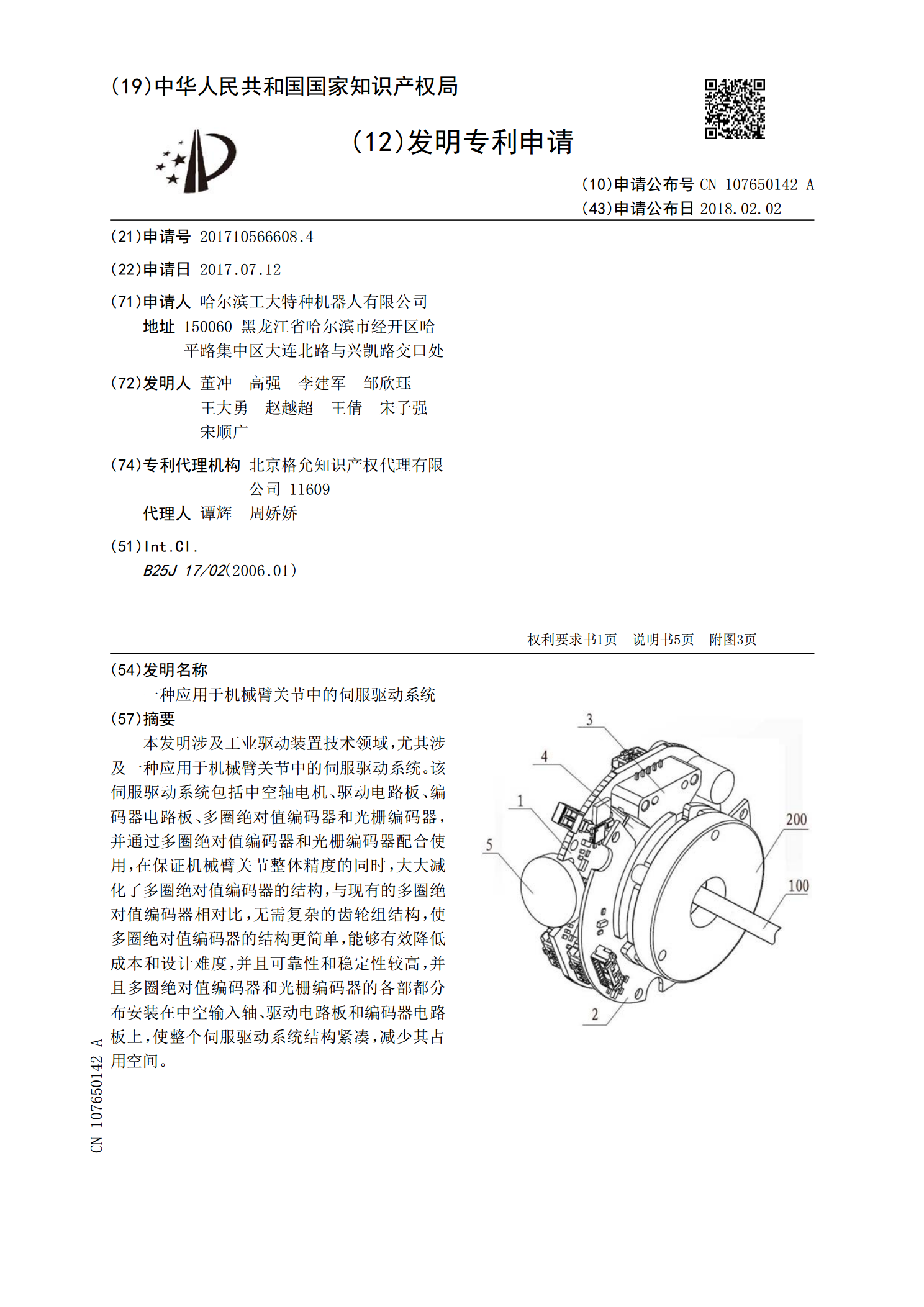
一种应用于机械臂关节中的伺服驱动系统.pdf
本发明涉及工业驱动装置技术领域,尤其涉及一种应用于机械臂关节中的伺服驱动系统。该伺服驱动系统包括中空轴电机、驱动电路板、编码器电路板、多圈绝对值编码器和光栅编码器,并通过多圈绝对值编码器和光栅编码器配合使用,在保证机械臂关节整体精度的同时,大大减化了多圈绝对值编码器的结构,与现有的多圈绝对值编码器相对比,无需复杂的齿轮组结构,使多圈绝对值编码器的结构更简单,能够有效降低成本和设计难度,并且可靠性和稳定性较高,并且多圈绝对值编码器和光栅编码器的各部都分布安装在中空输入轴、驱动电路板和编码器电路板上,使整个伺
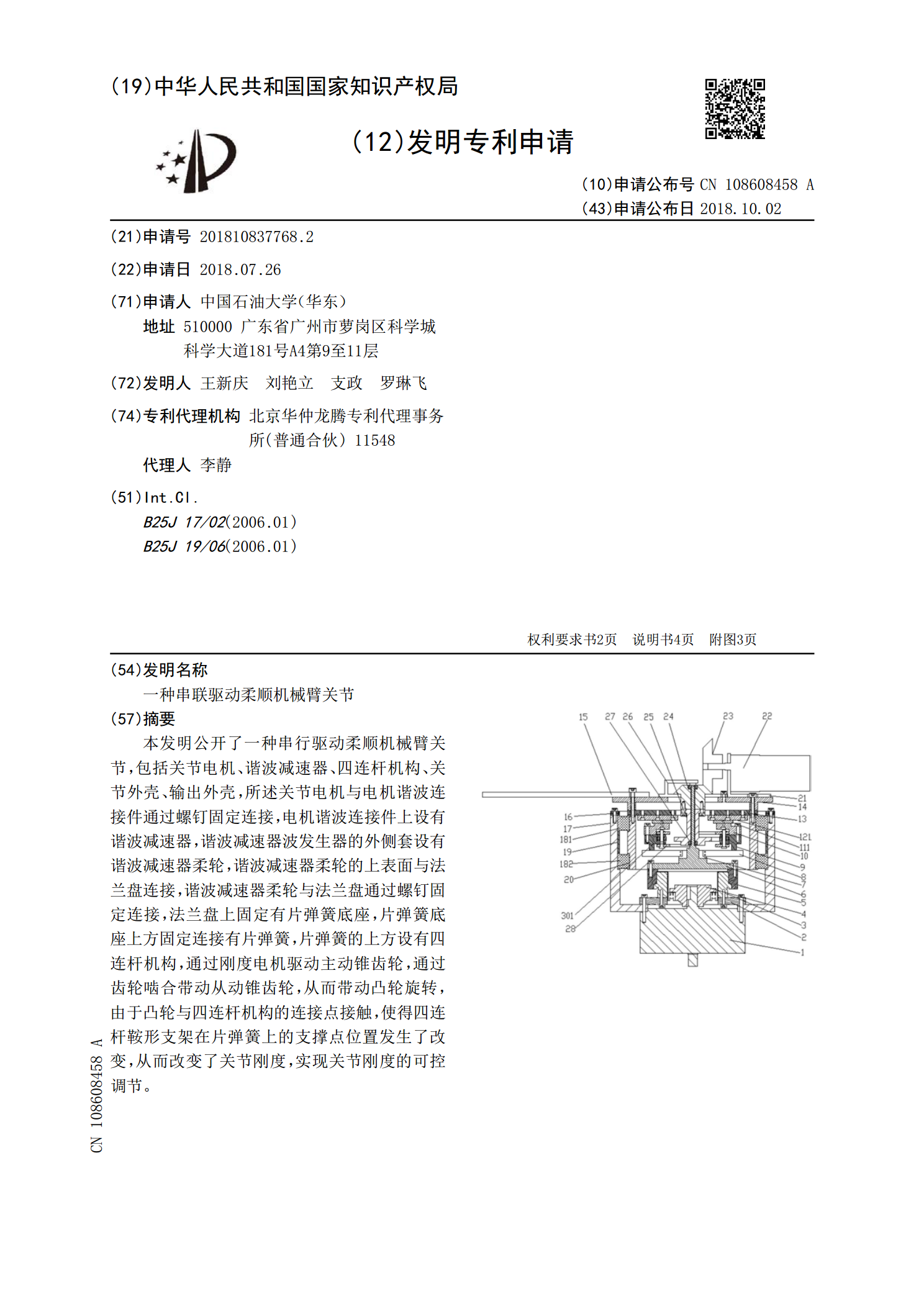
一种串联驱动柔顺机械臂关节.pdf
本发明公开了一种串行驱动柔顺机械臂关节,包括关节电机、谐波减速器、四连杆机构、关节外壳、输出外壳,所述关节电机与电机谐波连接件通过螺钉固定连接,电机谐波连接件上设有谐波减速器,谐波减速器波发生器的外侧套设有谐波减速器柔轮,谐波减速器柔轮的上表面与法兰盘连接,谐波减速器柔轮与法兰盘通过螺钉固定连接,法兰盘上固定有片弹簧底座,片弹簧底座上方固定连接有片弹簧,片弹簧的上方设有四连杆机构,通过刚度电机驱动主动锥齿轮,通过齿轮啮合带动从动锥齿轮,从而带动凸轮旋转,由于凸轮与四连杆机构的连接点接触,使得四连杆鞍形支架