
一种码垛机的抓取装置.pdf

一只****爱敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种码垛机抓取装置.pdf
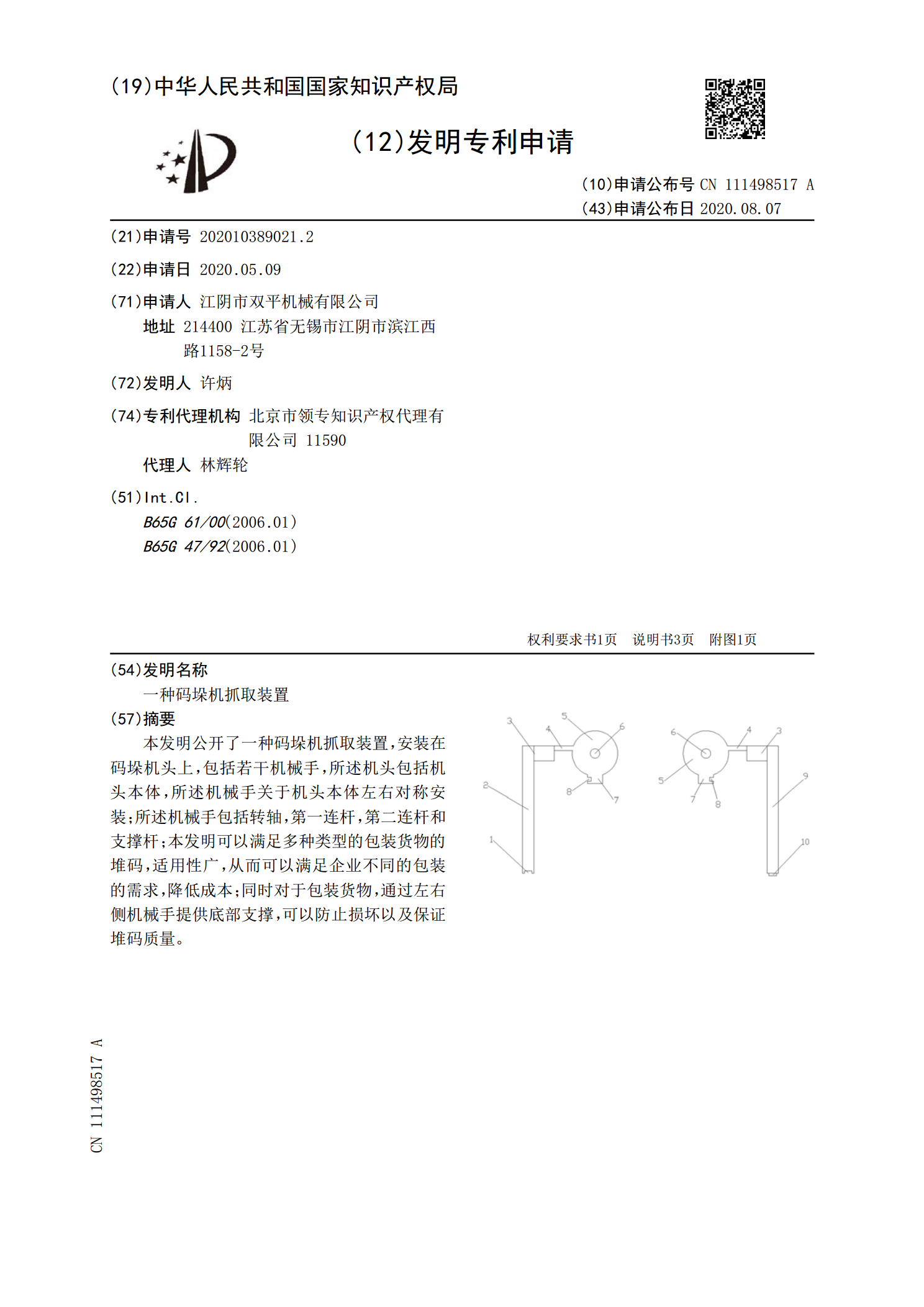
本发明公开了一种码垛机抓取装置,安装在码垛机头上,包括若干机械手,所述机头包括机头本体,所述机械手关于机头本体左右对称安装;所述机械手包括转轴,第一连杆,第二连杆和支撑杆;本发明可以满足多种类型的包装货物的堆码,适用性广,从而可以满足企业不同的包装的需求,降低成本;同时对于包装货物,通过左右侧机械手提供底部支撑,可以防止损坏以及保证堆码质量。
一种码垛机的抓取装置.pdf
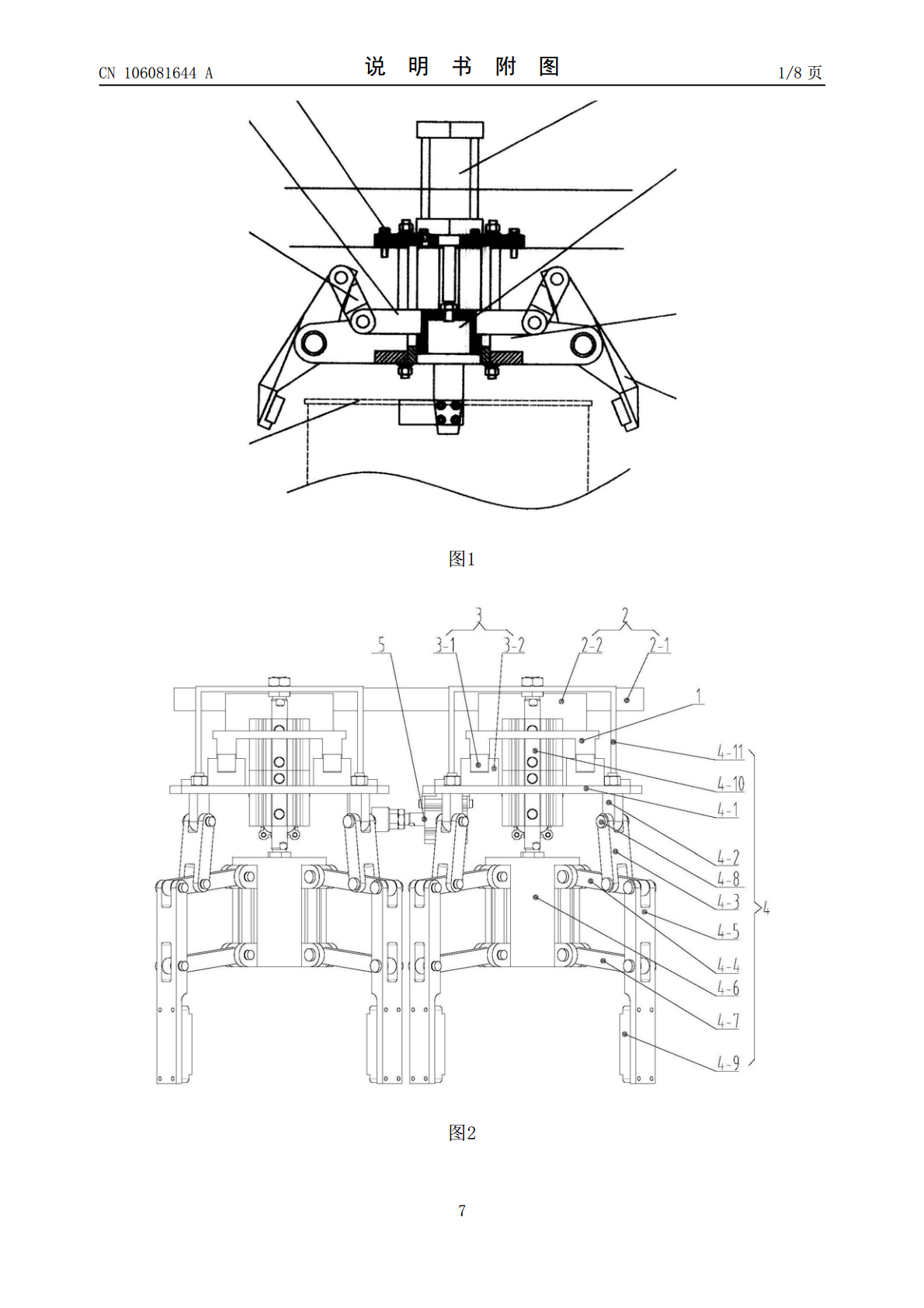
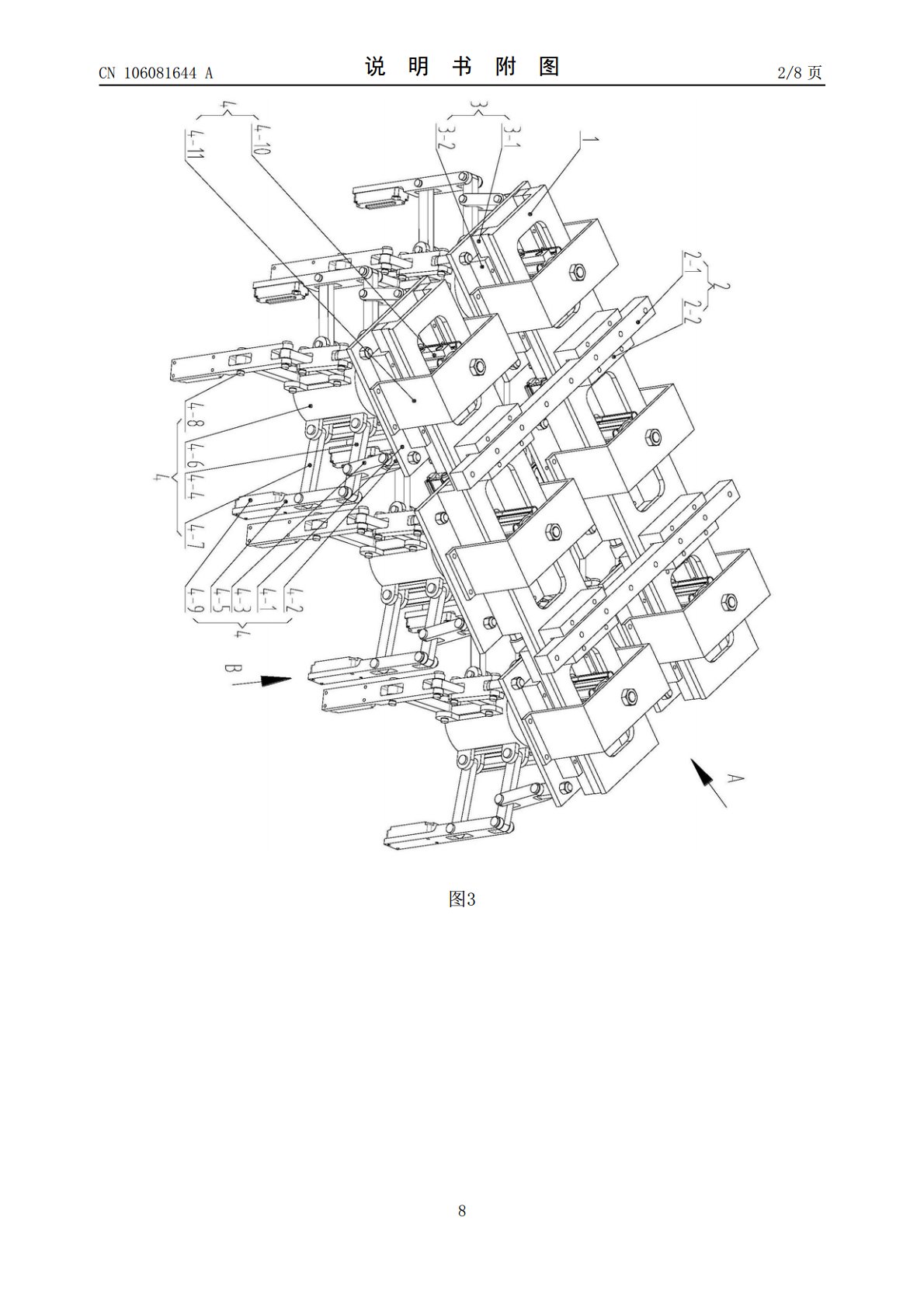
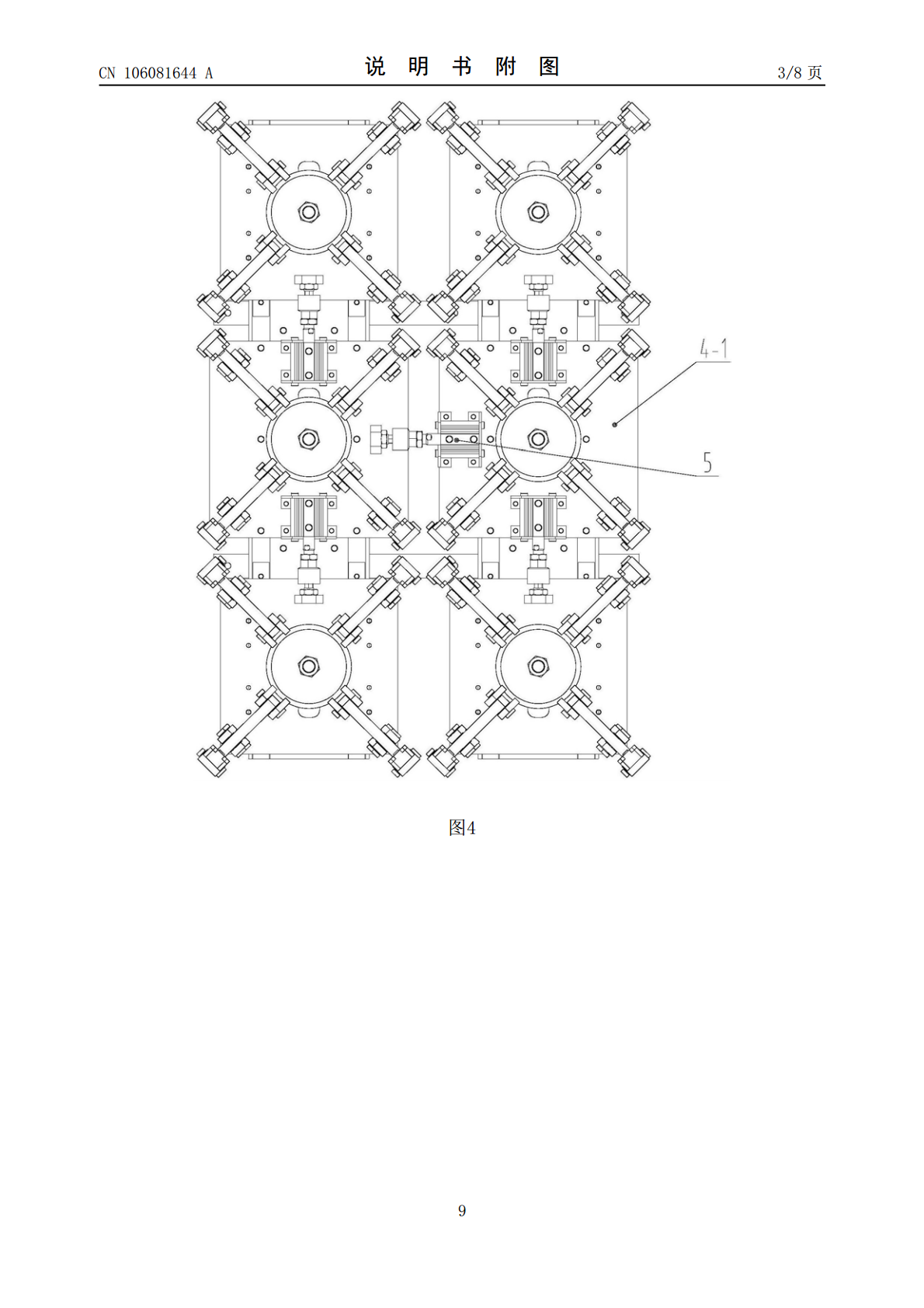
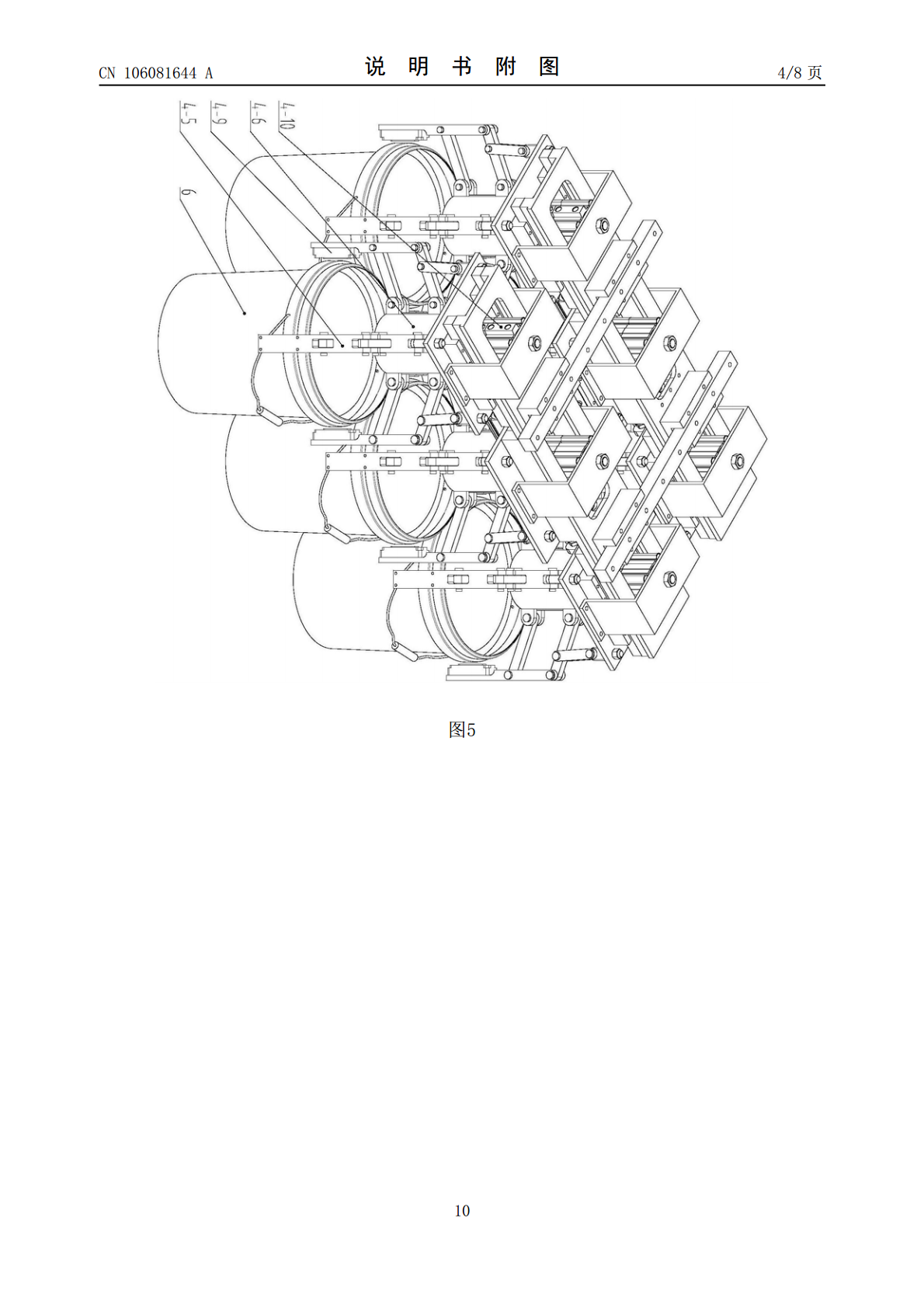
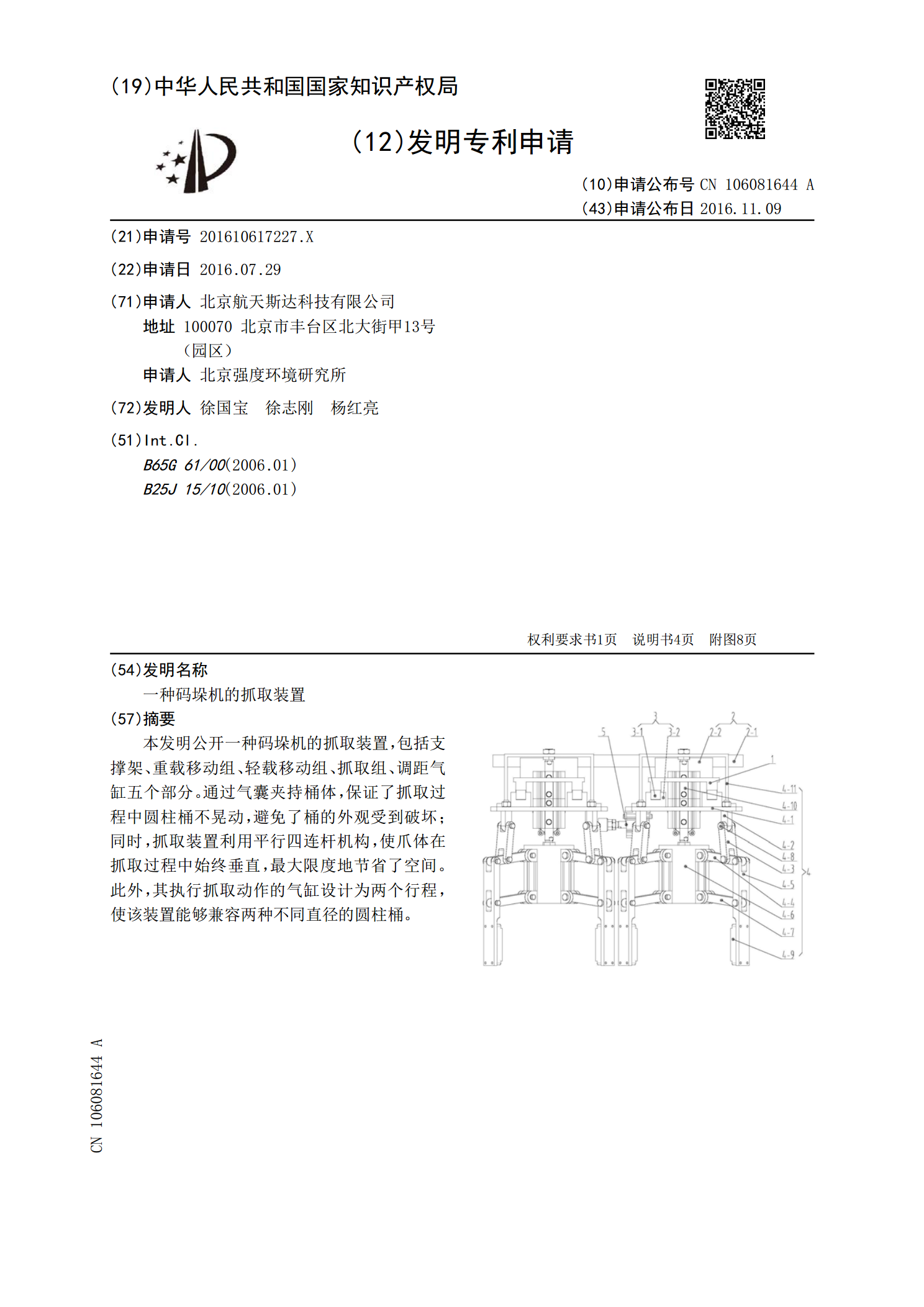
本发明公开一种码垛机的抓取装置,包括支撑架、重载移动组、轻载移动组、抓取组、调距气缸五个部分。通过气囊夹持桶体,保证了抓取过程中圆柱桶不晃动,避免了桶的外观受到破坏;同时,抓取装置利用平行四连杆机构,使爪体在抓取过程中始终垂直,最大限度地节省了空间。此外,其执行抓取动作的气缸设计为两个行程,使该装置能够兼容两种不同直径的圆柱桶。
一种新型码垛机抓取机构.pdf
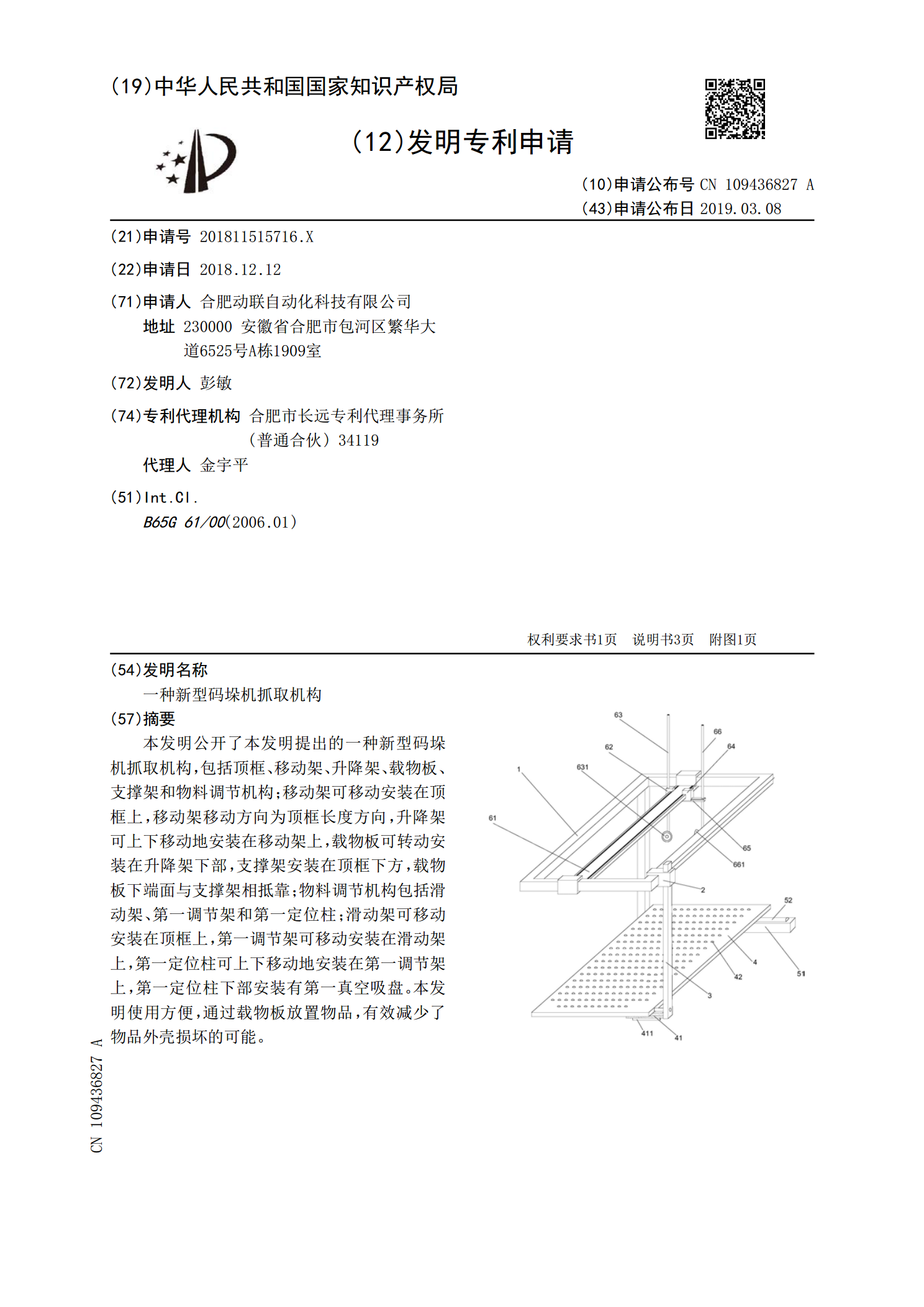
本发明公开了本发明提出的一种新型码垛机抓取机构,包括顶框、移动架、升降架、载物板、支撑架和物料调节机构;移动架可移动安装在顶框上,移动架移动方向为顶框长度方向,升降架可上下移动地安装在移动架上,载物板可转动安装在升降架下部,支撑架安装在顶框下方,载物板下端面与支撑架相抵靠;物料调节机构包括滑动架、第一调节架和第一定位柱;滑动架可移动安装在顶框上,第一调节架可移动安装在滑动架上,第一定位柱可上下移动地安装在第一调节架上,第一定位柱下部安装有第一真空吸盘。本发明使用方便,通过载物板放置物品,有效减少了物品外壳

一种椭圆桶码垛抓取装置.pdf
本实用新型具体是一种椭圆桶码垛抓取装置,包括连接架,所述连接架下端面固定有连接板,所述连接板上端面固定有气缸,所述连接板下端插接有第一限位板与第二限位板,所述连接板下端两侧转动安装有呈相互对称设置的夹爪,四个所述夹爪呈矩形分布,所述夹爪内端转动安装有滚动安装于第一限位板与第二限位板之间的滚轮,所述第一限位板上端固定有与气缸内腔插接的驱动杆,所述连接板下端插接有固定轴,所述夹爪呈直角设置,且所述夹爪上端外侧转动安装于固定轴下侧,所述连接板上端面外侧开设有定位孔,所述固定轴上端固定有与定位孔插接的定位螺杆,本

一种楔横轧码垛抓取装置.pdf
本发明公开了一种楔横轧码垛抓取装置,涉及抓取设备技术领域。包括第一夹持件和第二夹持件,第一夹持件设有第一啮合齿,第二夹持件设有第二啮合齿,通过两啮合齿啮合传动,两夹持件同时相背或相向转动实现开合抓取;第一夹持件的上部转动连接连杆的下端,连杆的上端固定连接第一连接件,在第一连接件的上方设有导向件,在第一连接件与导向件之间设有弹簧,吊绳的下端穿过导向件与弹簧后连接第一连接件,吊绳的上端连接直线驱动装置,直线驱动装置连接在夹持臂上,夹持臂沿悬臂水平移动,悬臂沿立柱上下移动。本发明实现了楔横轧码料自动化,降低了工