
一种机器人双自由度驱动模块.pdf

鹏飞****可爱

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人双自由度驱动模块.pdf
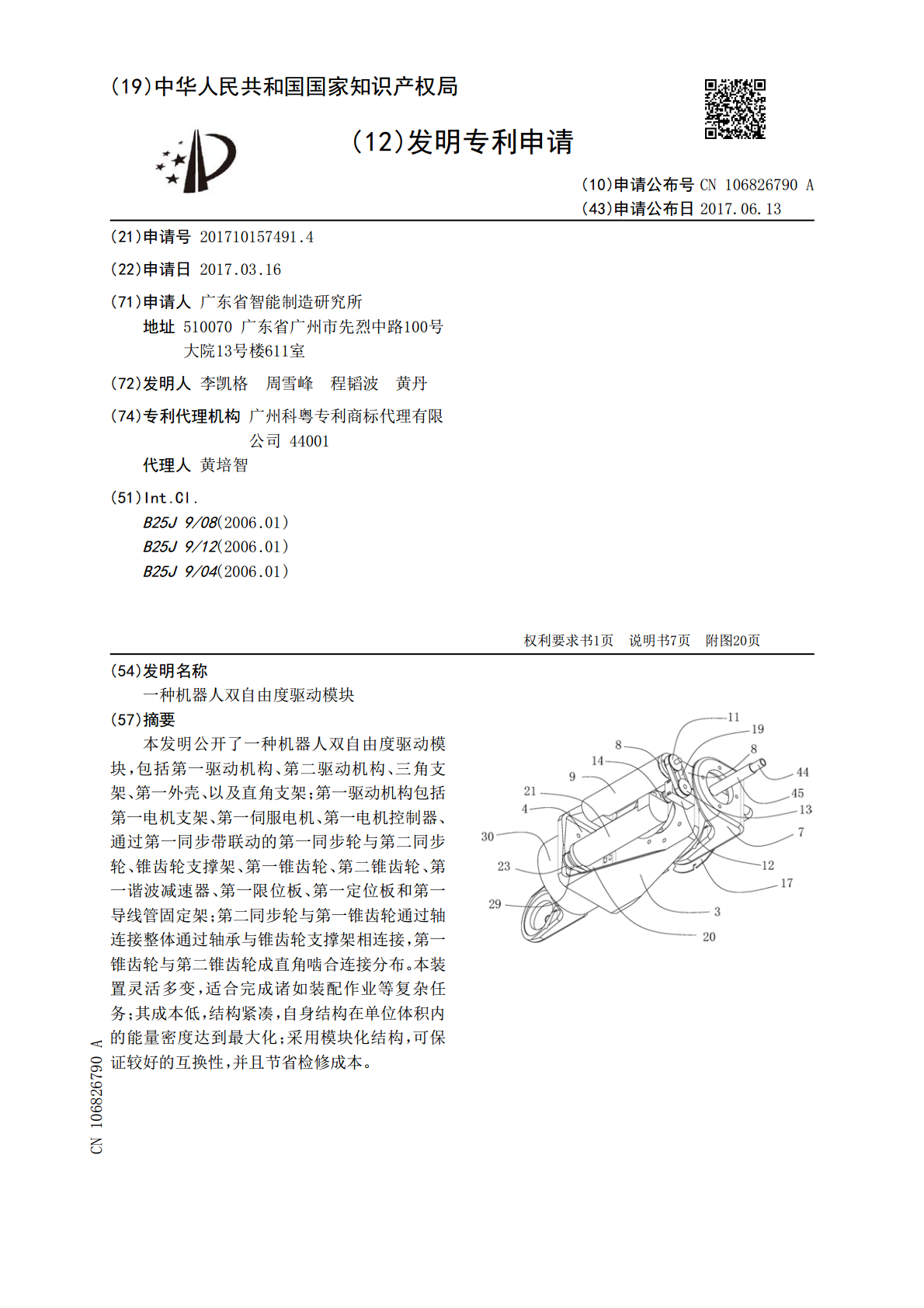
本发明公开了一种机器人双自由度驱动模块,包括第一驱动机构、第二驱动机构、三角支架、第一外壳、以及直角支架;第一驱动机构包括第一电机支架、第一伺服电机、第一电机控制器、通过第一同步带联动的第一同步轮与第二同步轮、锥齿轮支撑架、第一锥齿轮、第二锥齿轮、第一谐波减速器、第一限位板、第一定位板和第一导线管固定架;第二同步轮与第一锥齿轮通过轴连接整体通过轴承与锥齿轮支撑架相连接,第一锥齿轮与第二锥齿轮成直角啮合连接分布。本装置灵活多变,适合完成诸如装配作业等复杂任务;其成本低,结构紧凑,自身结构在单位体积内的能量密
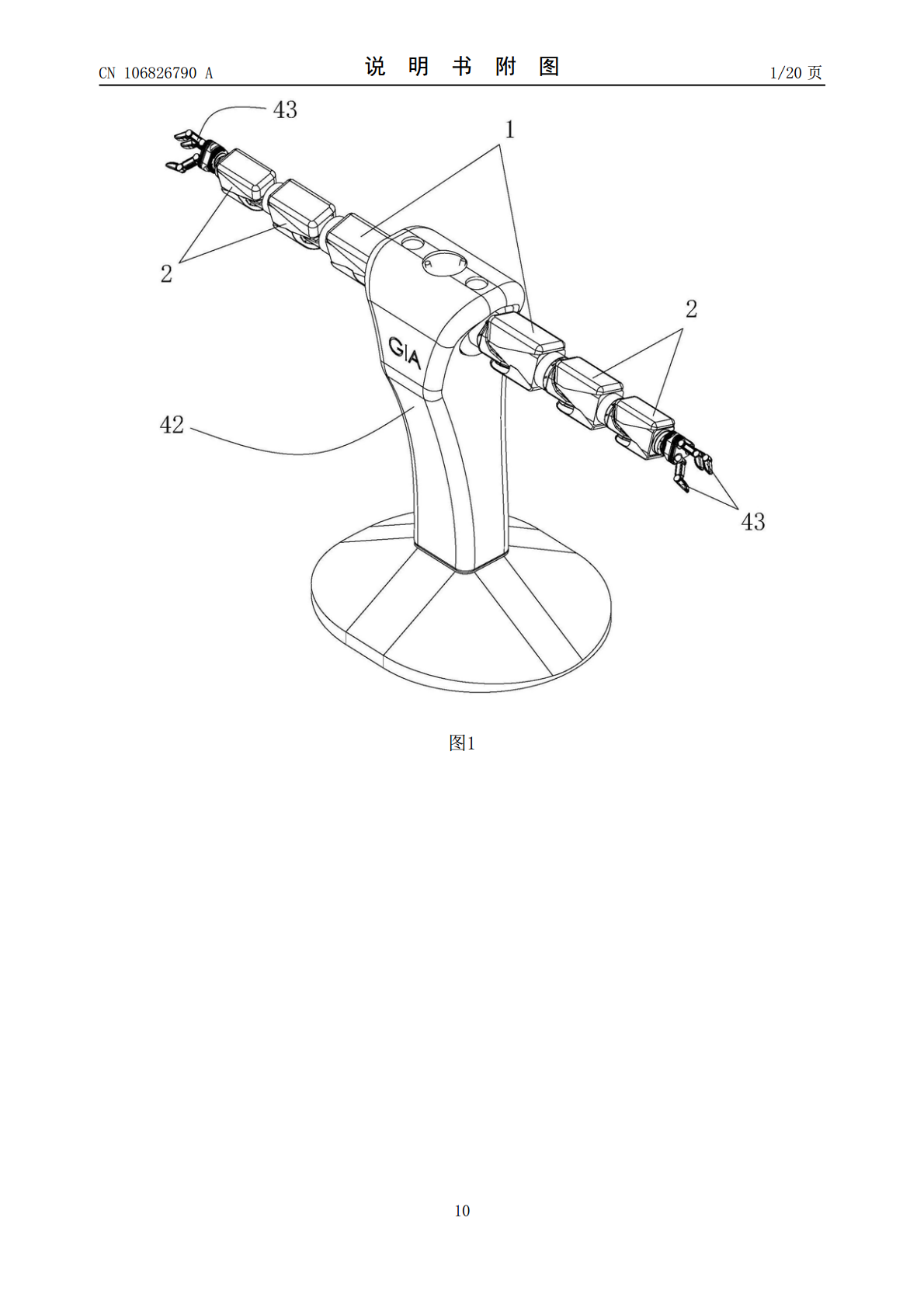
一种机器人单自由度驱动模块.pdf
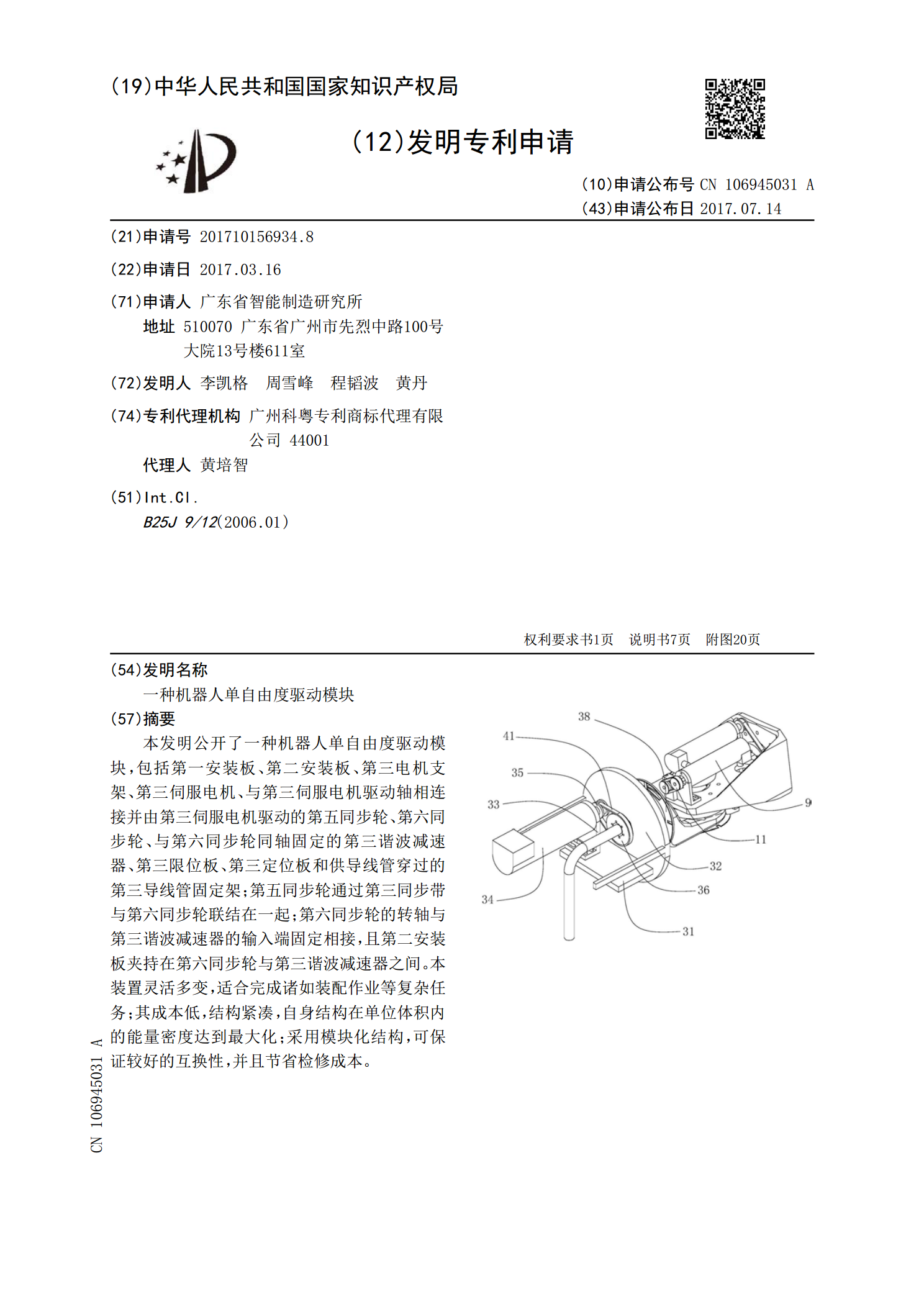
本发明公开了一种机器人单自由度驱动模块,包括第一安装板、第二安装板、第三电机支架、第三伺服电机、与第三伺服电机驱动轴相连接并由第三伺服电机驱动的第五同步轮、第六同步轮、与第六同步轮同轴固定的第三谐波减速器、第三限位板、第三定位板和供导线管穿过的第三导线管固定架;第五同步轮通过第三同步带与第六同步轮联结在一起;第六同步轮的转轴与第三谐波减速器的输入端固定相接,且第二安装板夹持在第六同步轮与第三谐波减速器之间。本装置灵活多变,适合完成诸如装配作业等复杂任务;其成本低,结构紧凑,自身结构在单位体积内的能量密度达
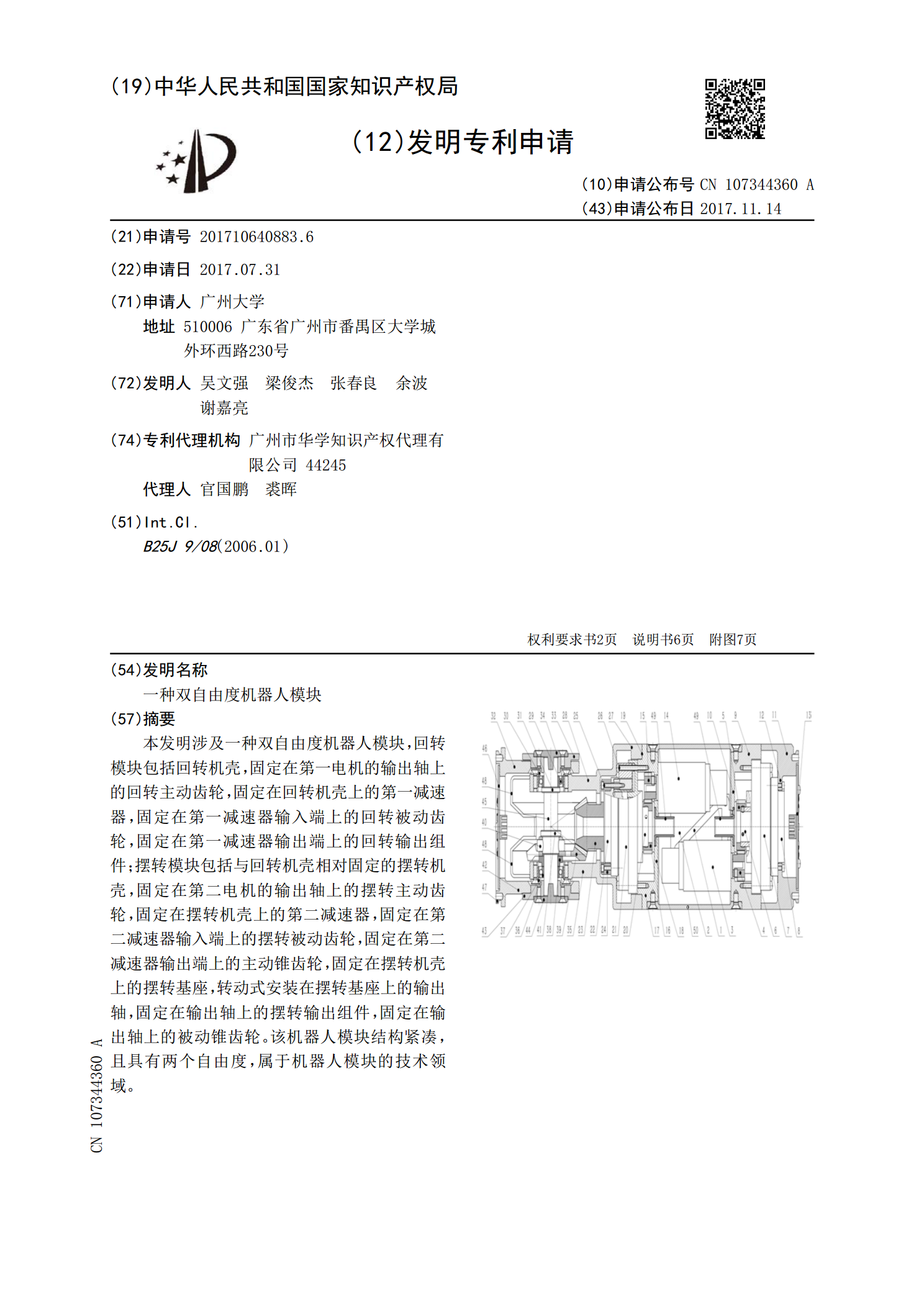
一种双自由度机器人模块.pdf
本发明涉及一种双自由度机器人模块,回转模块包括回转机壳,固定在第一电机的输出轴上的回转主动齿轮,固定在回转机壳上的第一减速器,固定在第一减速器输入端上的回转被动齿轮,固定在第一减速器输出端上的回转输出组件;摆转模块包括与回转机壳相对固定的摆转机壳,固定在第二电机的输出轴上的摆转主动齿轮,固定在摆转机壳上的第二减速器,固定在第二减速器输入端上的摆转被动齿轮,固定在第二减速器输出端上的主动锥齿轮,固定在摆转机壳上的摆转基座,转动式安装在摆转基座上的输出轴,固定在输出轴上的摆转输出组件,固定在输出轴上的被动锥齿
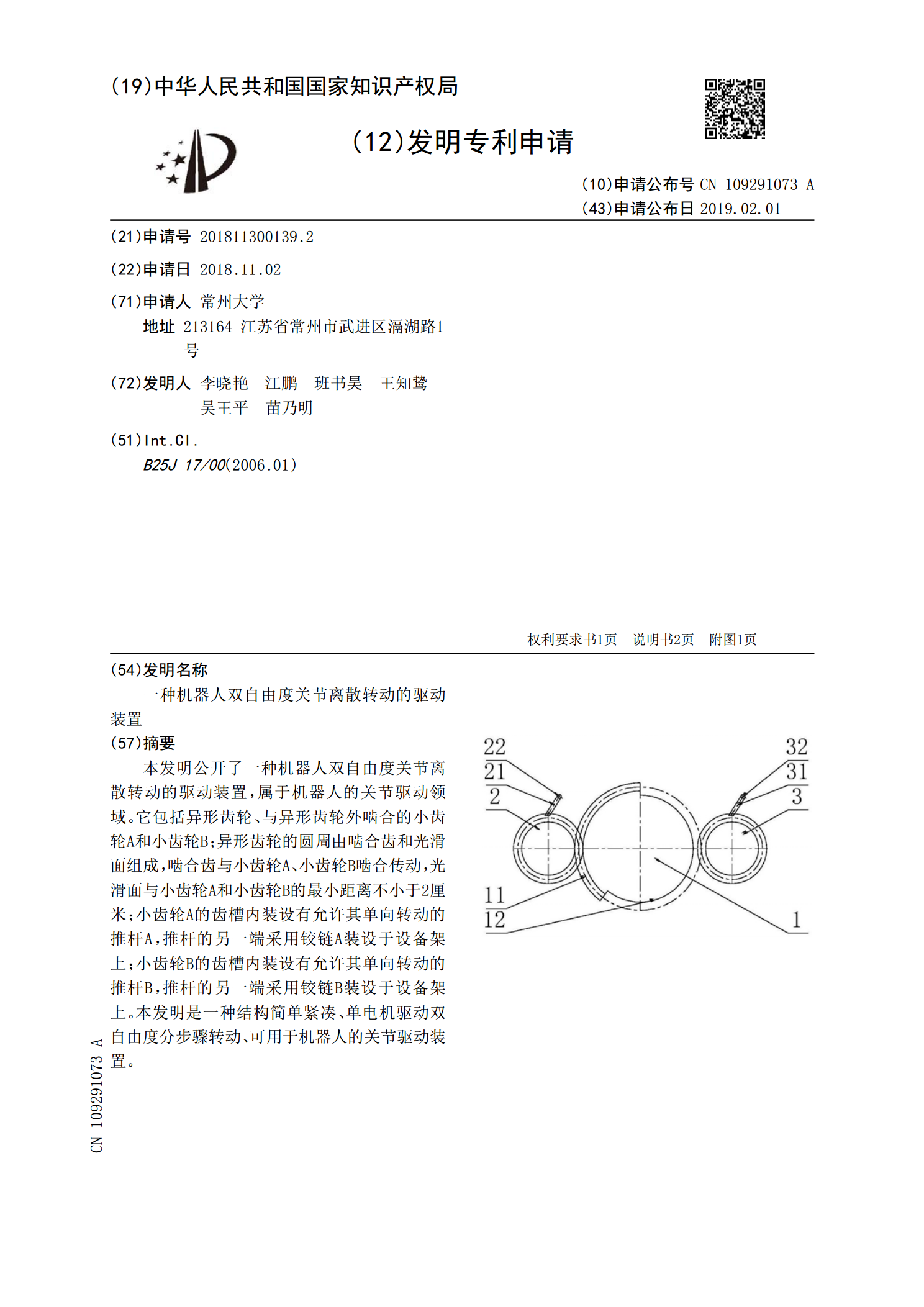
一种机器人双自由度关节离散转动的驱动装置.pdf
本发明公开了一种机器人双自由度关节离散转动的驱动装置,属于机器人的关节驱动领域。它包括异形齿轮、与异形齿轮外啮合的小齿轮A和小齿轮B;异形齿轮的圆周由啮合齿和光滑面组成,啮合齿与小齿轮A、小齿轮B啮合传动,光滑面与小齿轮A和小齿轮B的最小距离不小于2厘米;小齿轮A的齿槽内装设有允许其单向转动的推杆A,推杆的另一端采用铰链A装设于设备架上;小齿轮B的齿槽内装设有允许其单向转动的推杆B,推杆的另一端采用铰链B装设于设备架上。本发明是一种结构简单紧凑、单电机驱动双自由度分步骤转动、可用于机器人的关节驱动装置。
一种绳索驱动的单自由度模块及采用其的多自由度机构.pdf
本发明提供了一种绳索驱动的单自由度模块及采用其的多自由度机构,单自由度模块包括固定平台、活动平台、连接支链和驱动支链;驱动支链包括第一定滑轮、第二定滑轮、第一动滑轮、第二动滑轮、两根绳索和绳索驱动器,第一定滑轮和第二定滑轮设在固定平台上,二者分别设在连接支链的两侧;第一动滑轮和第二动滑轮设在活动平台上,二者分别设在连接支链的两侧,并第一定滑轮和第一动滑轮设在连接支链的同侧;其中一根绳索的一端相对第一定滑轮固定,另一端绕过第一动滑轮连接至绳索驱动器;另一根绳索的一端相对第二定滑轮固定,另一端绕过第二动滑轮连