
一种双自由度机器人模块.pdf

猫巷****永安


1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双自由度机器人模块.pdf
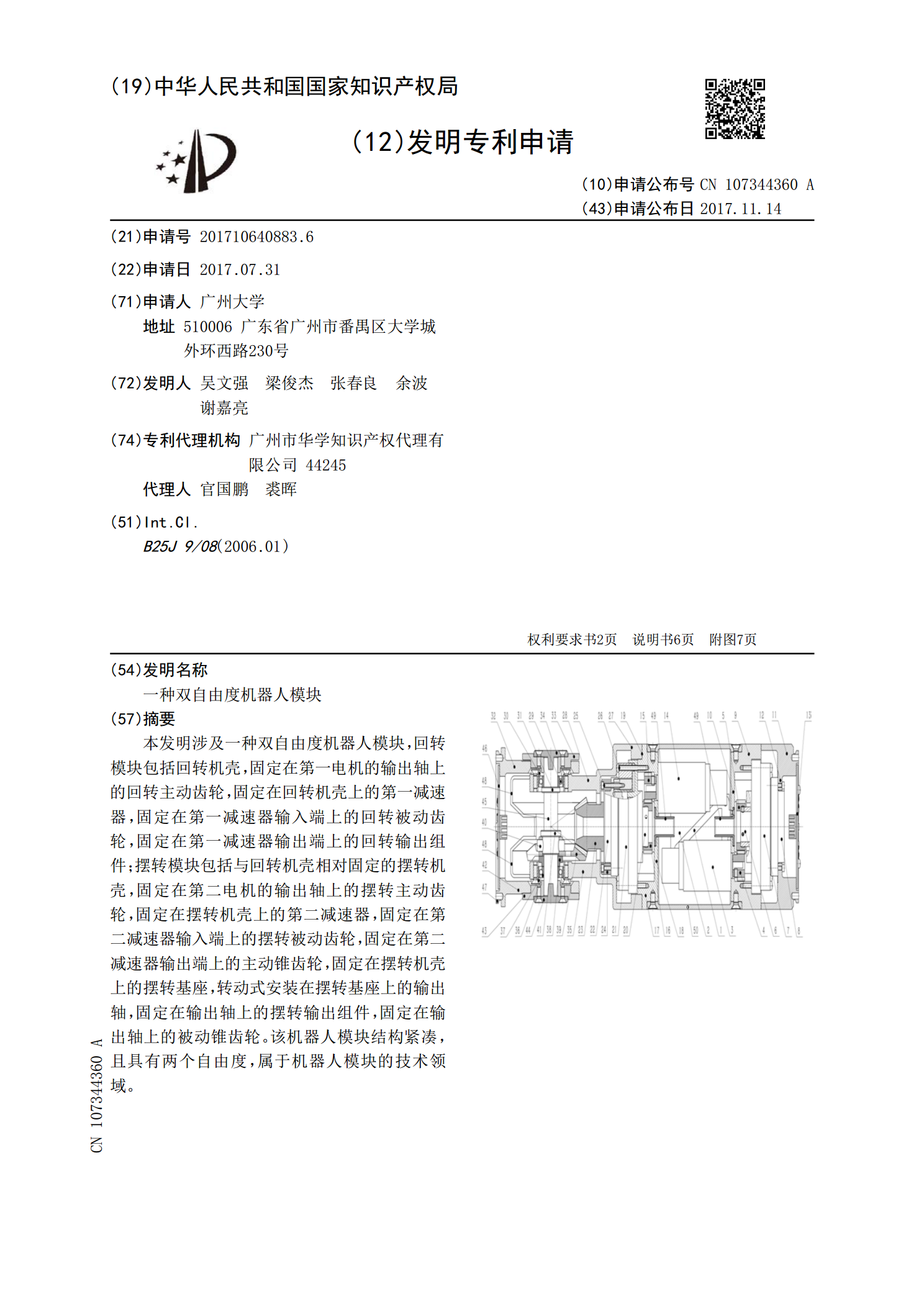
本发明涉及一种双自由度机器人模块,回转模块包括回转机壳,固定在第一电机的输出轴上的回转主动齿轮,固定在回转机壳上的第一减速器,固定在第一减速器输入端上的回转被动齿轮,固定在第一减速器输出端上的回转输出组件;摆转模块包括与回转机壳相对固定的摆转机壳,固定在第二电机的输出轴上的摆转主动齿轮,固定在摆转机壳上的第二减速器,固定在第二减速器输入端上的摆转被动齿轮,固定在第二减速器输出端上的主动锥齿轮,固定在摆转机壳上的摆转基座,转动式安装在摆转基座上的输出轴,固定在输出轴上的摆转输出组件,固定在输出轴上的被动锥齿

一种机器人双自由度驱动模块.pdf
本发明公开了一种机器人双自由度驱动模块,包括第一驱动机构、第二驱动机构、三角支架、第一外壳、以及直角支架;第一驱动机构包括第一电机支架、第一伺服电机、第一电机控制器、通过第一同步带联动的第一同步轮与第二同步轮、锥齿轮支撑架、第一锥齿轮、第二锥齿轮、第一谐波减速器、第一限位板、第一定位板和第一导线管固定架;第二同步轮与第一锥齿轮通过轴连接整体通过轴承与锥齿轮支撑架相连接,第一锥齿轮与第二锥齿轮成直角啮合连接分布。本装置灵活多变,适合完成诸如装配作业等复杂任务;其成本低,结构紧凑,自身结构在单位体积内的能量密
一种机器人单自由度驱动模块.pdf
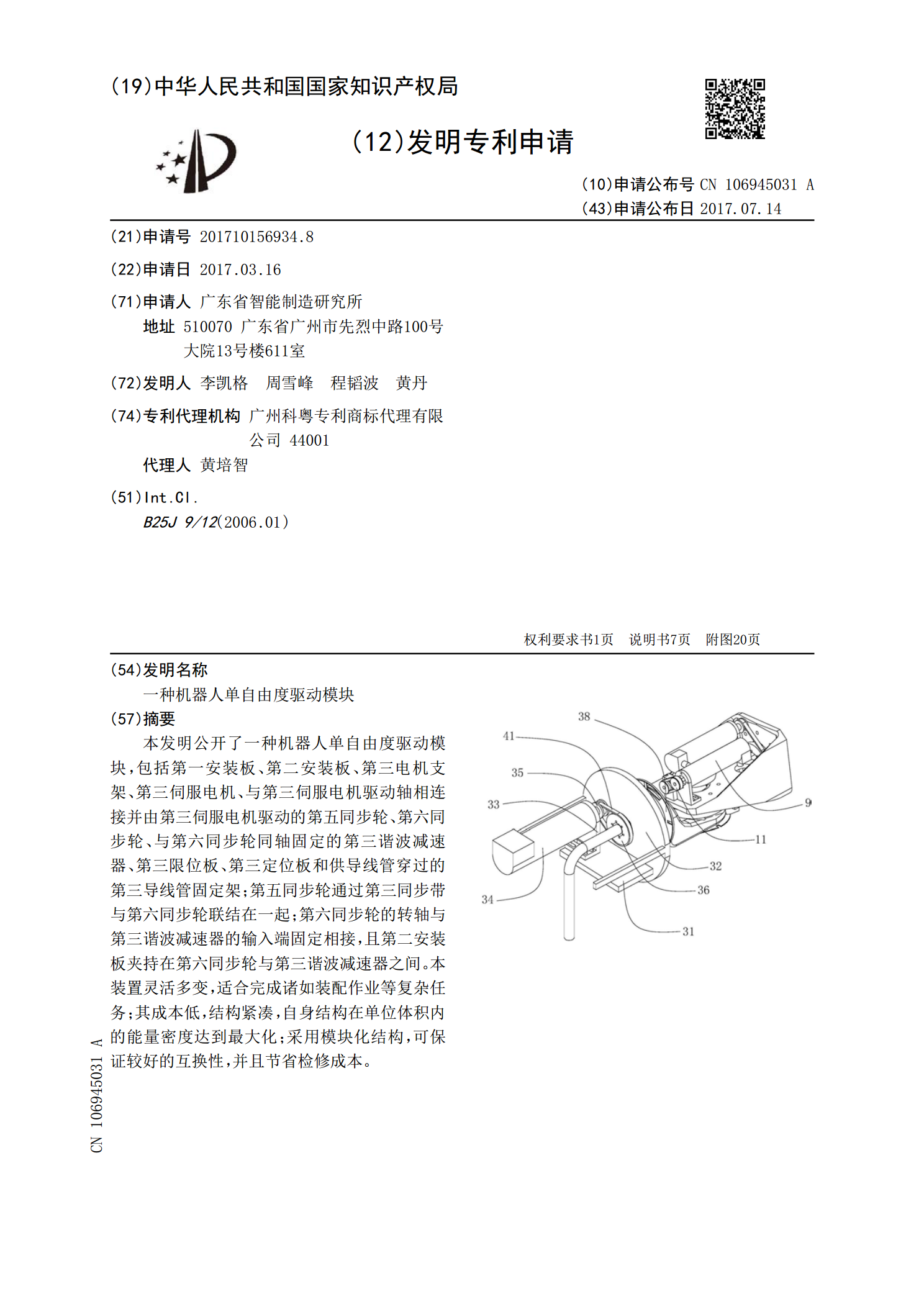
本发明公开了一种机器人单自由度驱动模块,包括第一安装板、第二安装板、第三电机支架、第三伺服电机、与第三伺服电机驱动轴相连接并由第三伺服电机驱动的第五同步轮、第六同步轮、与第六同步轮同轴固定的第三谐波减速器、第三限位板、第三定位板和供导线管穿过的第三导线管固定架;第五同步轮通过第三同步带与第六同步轮联结在一起;第六同步轮的转轴与第三谐波减速器的输入端固定相接,且第二安装板夹持在第六同步轮与第三谐波减速器之间。本装置灵活多变,适合完成诸如装配作业等复杂任务;其成本低,结构紧凑,自身结构在单位体积内的能量密度达
一种双自由度模块化关节装置及具有该装置的机器人.pdf
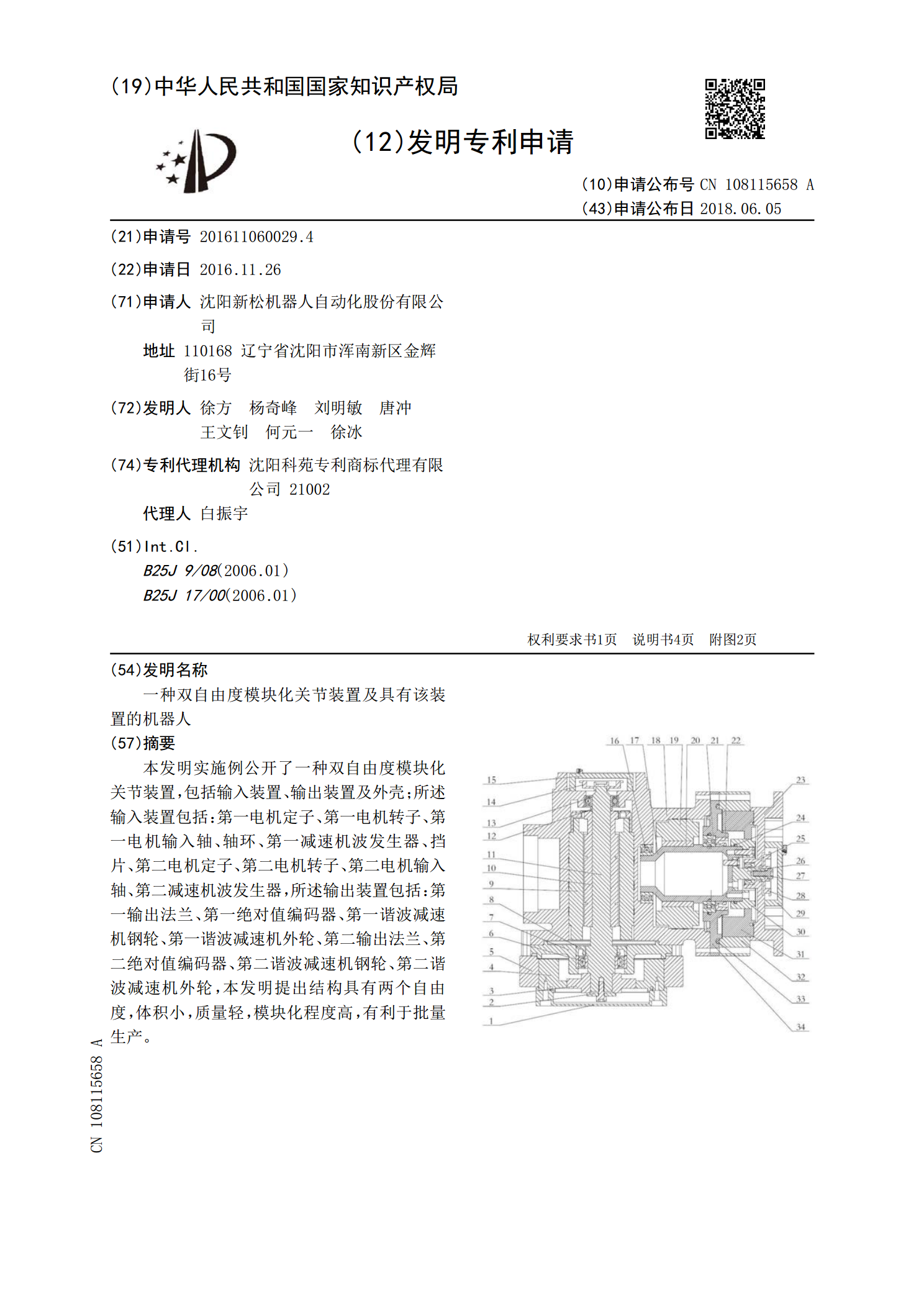
本发明实施例公开了一种双自由度模块化关节装置,包括输入装置、输出装置及外壳;所述输入装置包括:第一电机定子、第一电机转子、第一电机输入轴、轴环、第一减速机波发生器、挡片、第二电机定子、第二电机转子、第二电机输入轴、第二减速机波发生器,所述输出装置包括:第一输出法兰、第一绝对值编码器、第一谐波减速机钢轮、第一谐波减速机外轮、第二输出法兰、第二绝对值编码器、第二谐波减速机钢轮、第二谐波减速机外轮,本发明提出结构具有两个自由度,体积小,质量轻,模块化程度高,有利于批量生产。
一种模块化两自由度机器人关节.pdf
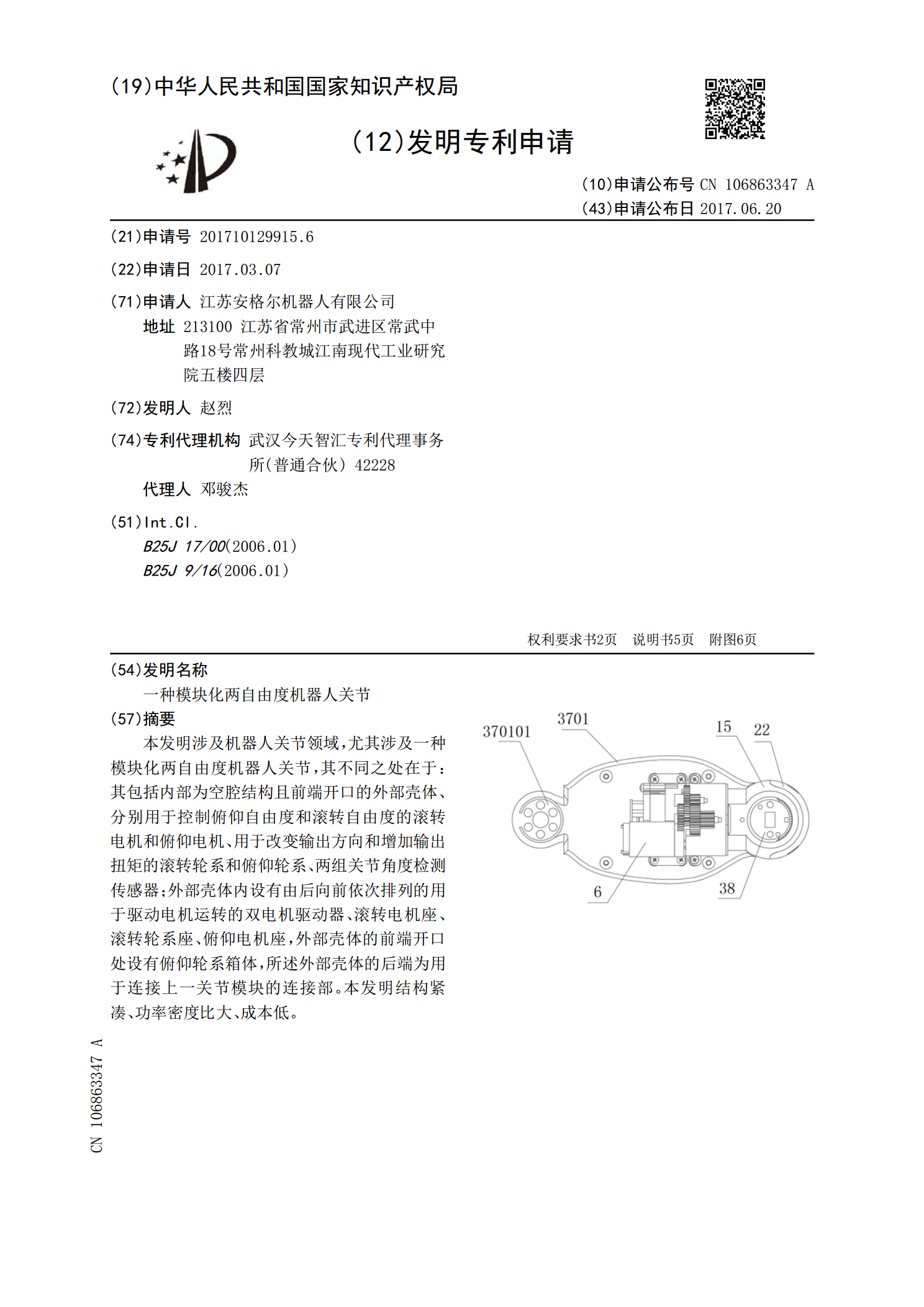
本发明涉及机器人关节领域,尤其涉及一种模块化两自由度机器人关节,其不同之处在于:其包括内部为空腔结构且前端开口的外部壳体、分别用于控制俯仰自由度和滚转自由度的滚转电机和俯仰电机、用于改变输出方向和增加输出扭矩的滚转轮系和俯仰轮系、两组关节角度检测传感器;外部壳体内设有由后向前依次排列的用于驱动电机运转的双电机驱动器、滚转电机座、滚转轮系座、俯仰电机座,外部壳体的前端开口处设有俯仰轮系箱体,所述外部壳体的后端为用于连接上一关节模块的连接部。本发明结构紧凑、功率密度比大、成本低。