
一种机器人单自由度驱动模块.pdf

fa****楠吖

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人单自由度驱动模块.pdf
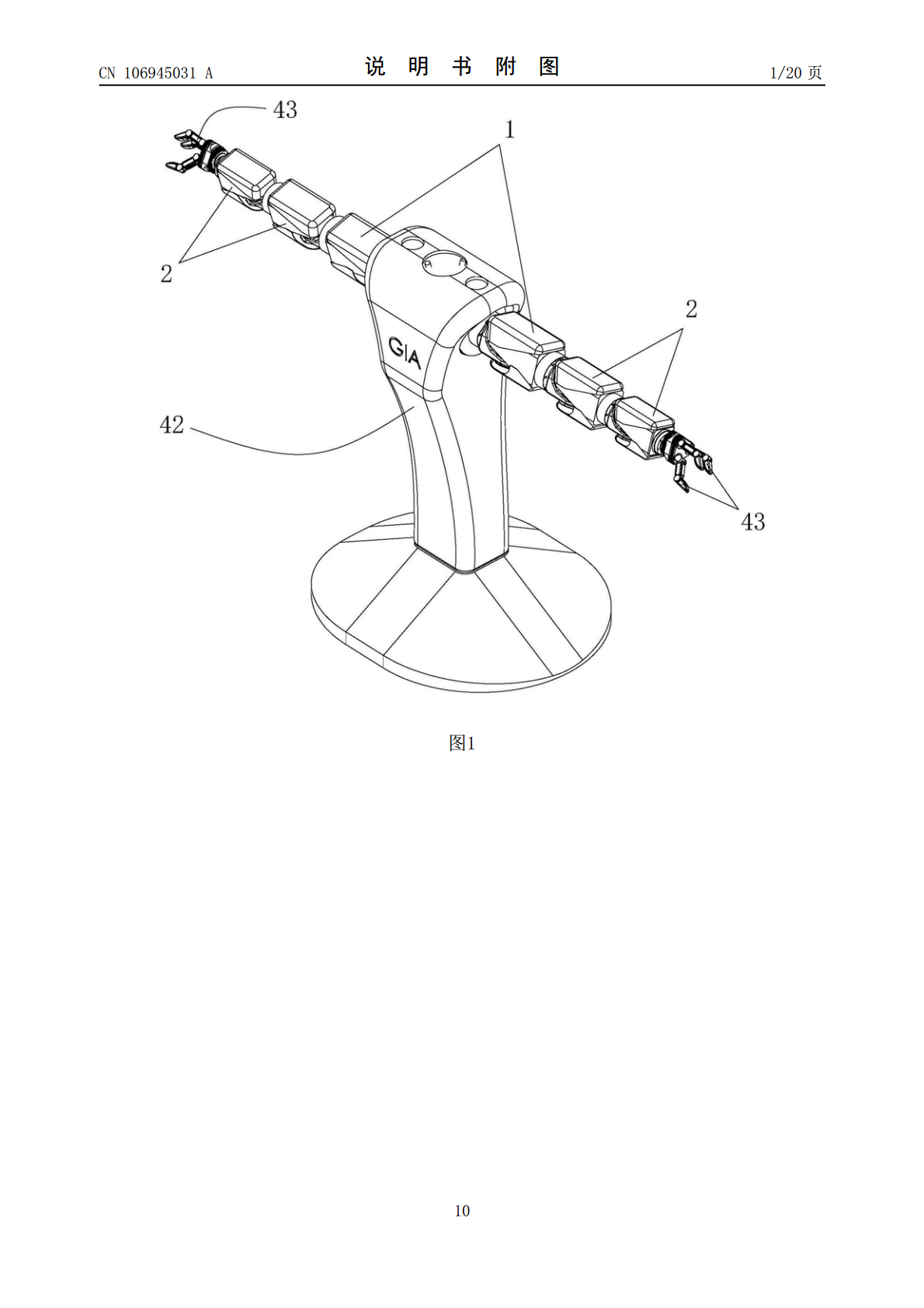
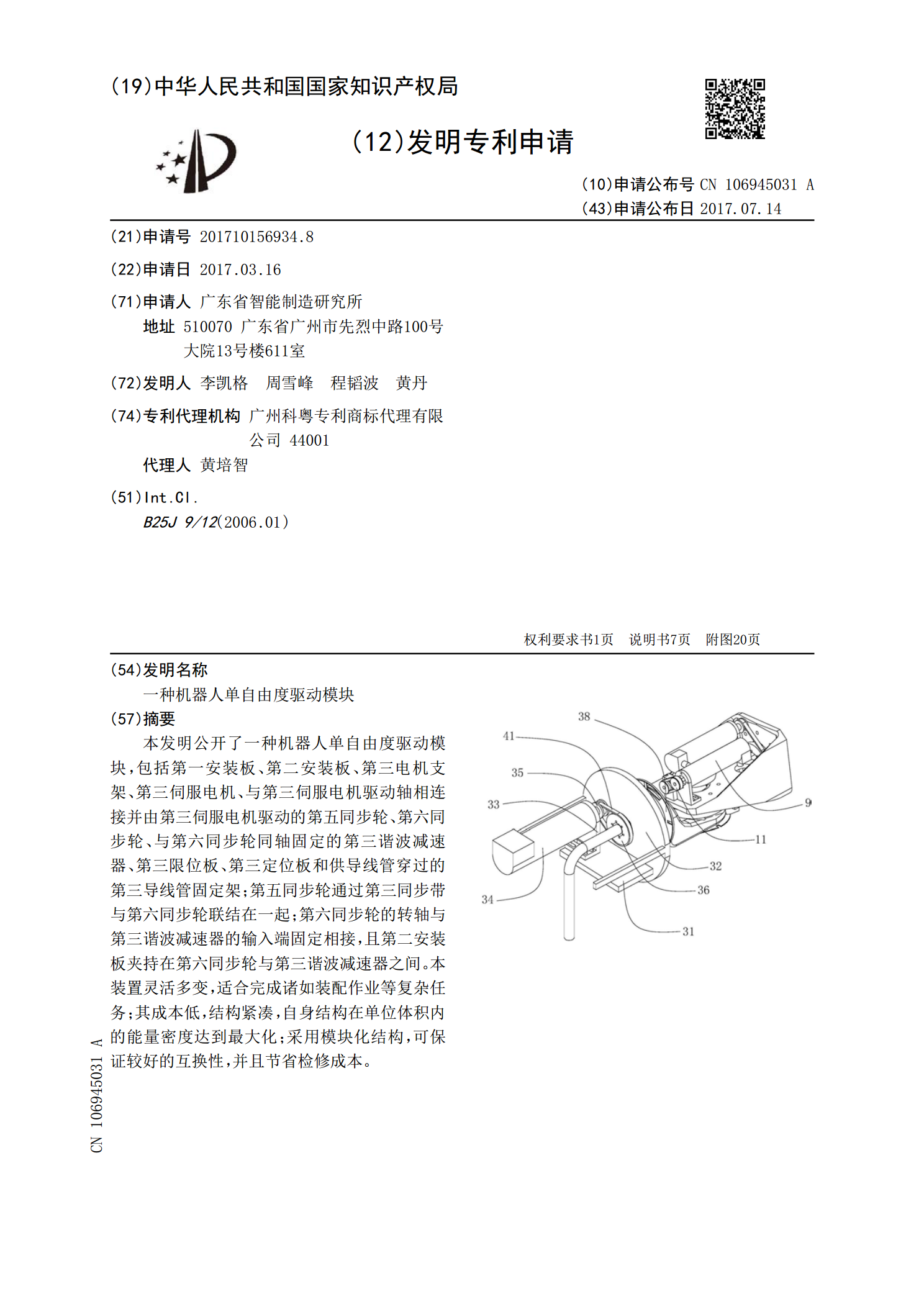
本发明公开了一种机器人单自由度驱动模块,包括第一安装板、第二安装板、第三电机支架、第三伺服电机、与第三伺服电机驱动轴相连接并由第三伺服电机驱动的第五同步轮、第六同步轮、与第六同步轮同轴固定的第三谐波减速器、第三限位板、第三定位板和供导线管穿过的第三导线管固定架;第五同步轮通过第三同步带与第六同步轮联结在一起;第六同步轮的转轴与第三谐波减速器的输入端固定相接,且第二安装板夹持在第六同步轮与第三谐波减速器之间。本装置灵活多变,适合完成诸如装配作业等复杂任务;其成本低,结构紧凑,自身结构在单位体积内的能量密度达

一种机器人双自由度驱动模块.pdf
本发明公开了一种机器人双自由度驱动模块,包括第一驱动机构、第二驱动机构、三角支架、第一外壳、以及直角支架;第一驱动机构包括第一电机支架、第一伺服电机、第一电机控制器、通过第一同步带联动的第一同步轮与第二同步轮、锥齿轮支撑架、第一锥齿轮、第二锥齿轮、第一谐波减速器、第一限位板、第一定位板和第一导线管固定架;第二同步轮与第一锥齿轮通过轴连接整体通过轴承与锥齿轮支撑架相连接,第一锥齿轮与第二锥齿轮成直角啮合连接分布。本装置灵活多变,适合完成诸如装配作业等复杂任务;其成本低,结构紧凑,自身结构在单位体积内的能量密
一种绳索驱动的单自由度模块及采用其的多自由度机构.pdf
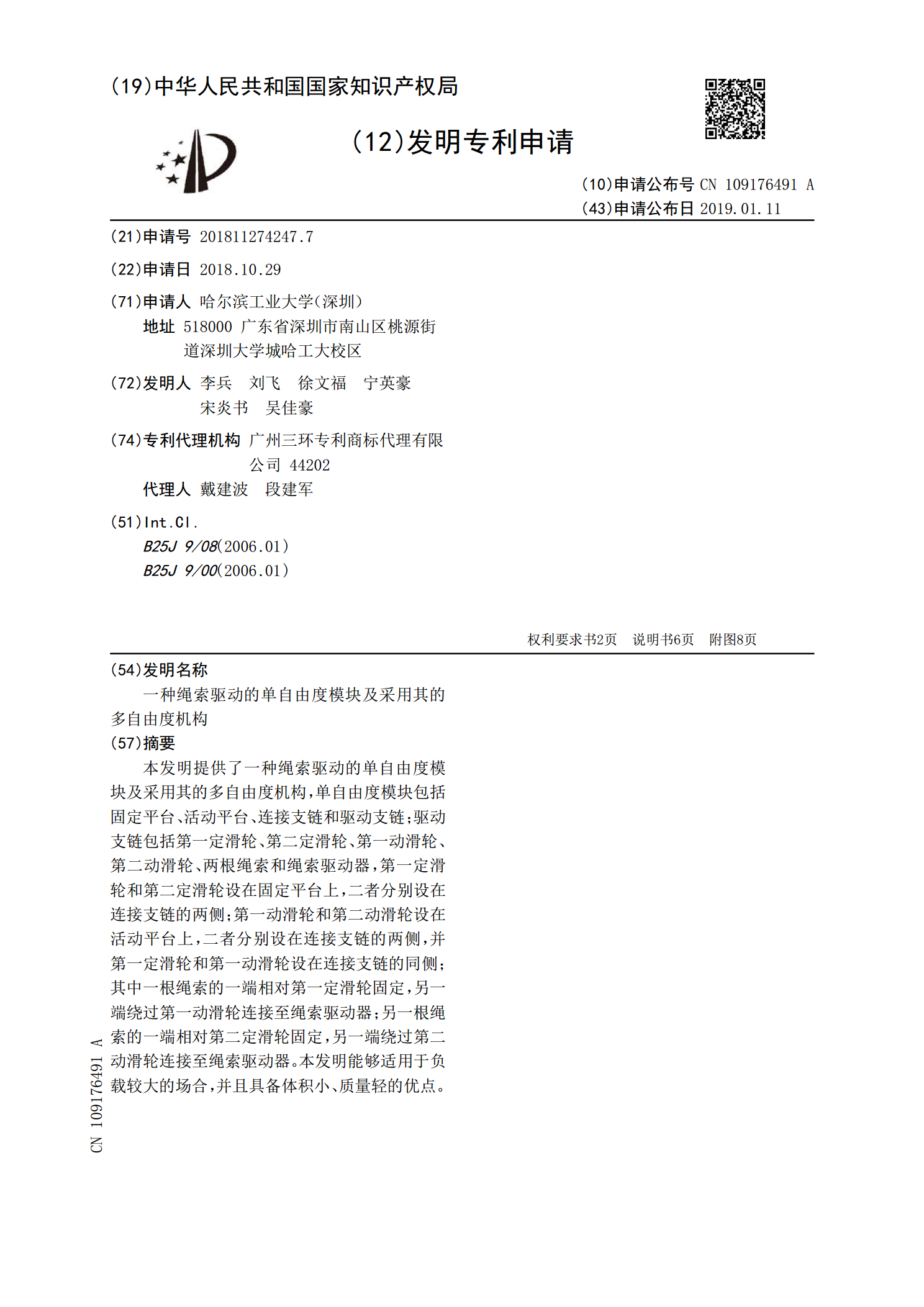
本发明提供了一种绳索驱动的单自由度模块及采用其的多自由度机构,单自由度模块包括固定平台、活动平台、连接支链和驱动支链;驱动支链包括第一定滑轮、第二定滑轮、第一动滑轮、第二动滑轮、两根绳索和绳索驱动器,第一定滑轮和第二定滑轮设在固定平台上,二者分别设在连接支链的两侧;第一动滑轮和第二动滑轮设在活动平台上,二者分别设在连接支链的两侧,并第一定滑轮和第一动滑轮设在连接支链的同侧;其中一根绳索的一端相对第一定滑轮固定,另一端绕过第一动滑轮连接至绳索驱动器;另一根绳索的一端相对第二定滑轮固定,另一端绕过第二动滑轮连

一种单自由度机器人摆转关节模块.pdf
本发明涉及一种单自由度机器人摆转关节模块。该关节模块具有一个转动自由度,其关节转轴与模块连接轴线垂直,形成摆转运动。它配以相应的控制系统即可实现运动或力矩控制,关节零位和极限位置用霍尔开关检测。主要包括伺服电机及光电编码器组件、盘式谐波减速器组件、谐波减速器输出轴、电机座、关节座、轴承及轴套和端盖、一对锥齿轮和关节转轴等。电机轴通过轴套与谐波减速器的波发生器连接,而谐波减速器的输出刚轮与输出盘固接。后者与关节转轴之间是一对锥齿轮。关节转轴通过梯形键与关节摆动件连接而最终实现运动和动力的传输。本模块结构紧凑
一种单自由度机器人回转关节模块.pdf
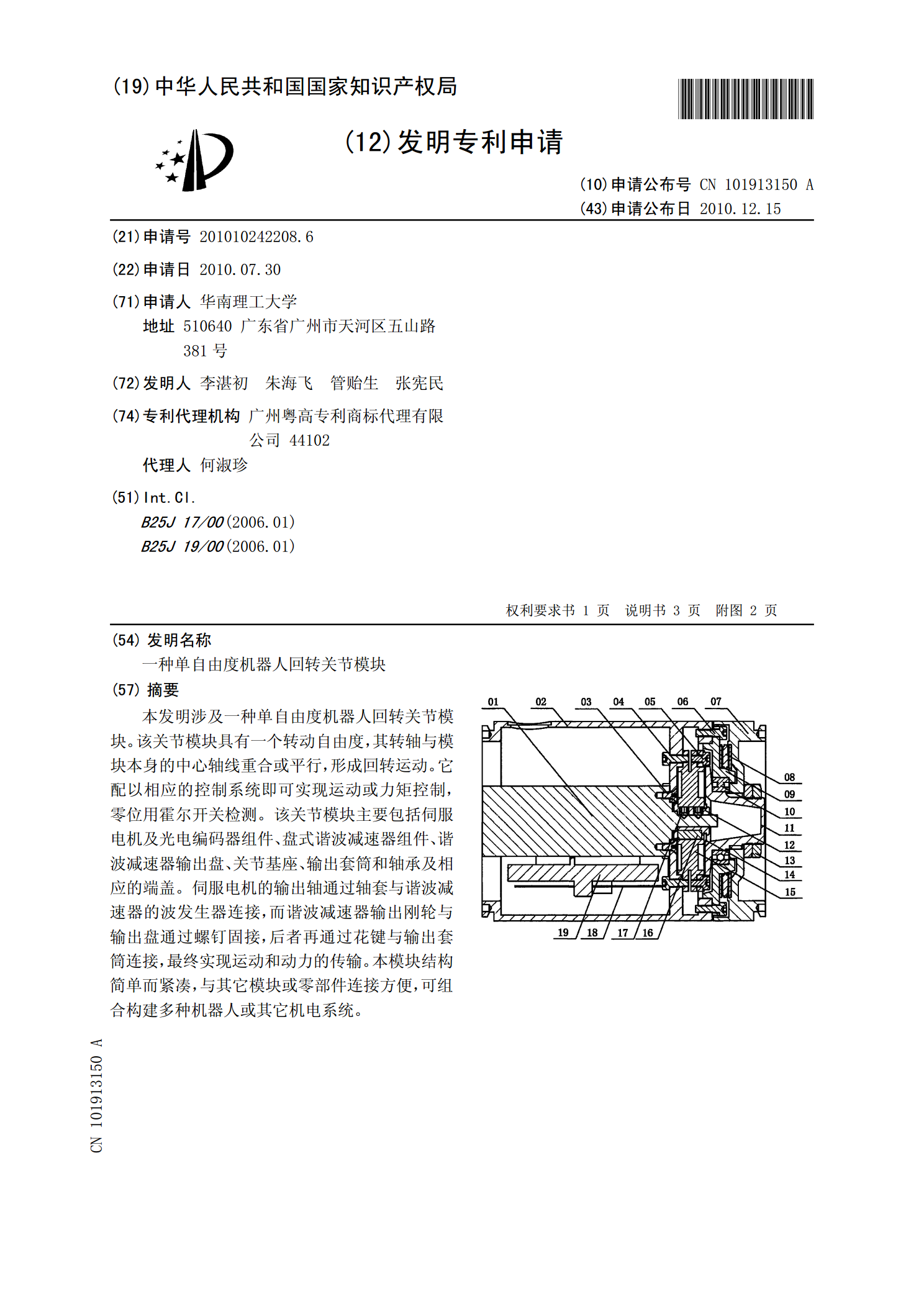
本发明涉及一种单自由度机器人回转关节模块。该关节模块具有一个转动自由度,其转轴与模块本身的中心轴线重合或平行,形成回转运动。它配以相应的控制系统即可实现运动或力矩控制,零位用霍尔开关检测。该关节模块主要包括伺服电机及光电编码器组件、盘式谐波减速器组件、谐波减速器输出盘、关节基座、输出套筒和轴承及相应的端盖。伺服电机的输出轴通过轴套与谐波减速器的波发生器连接,而谐波减速器输出刚轮与输出盘通过螺钉固接,后者再通过花键与输出套筒连接,最终实现运动和动力的传输。本模块结构简单而紧凑,与其它模块或零部件连接方便,可