
一种机器人双自由度关节离散转动的驱动装置.pdf

猫巷****提格


1/5
2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人双自由度关节离散转动的驱动装置.pdf
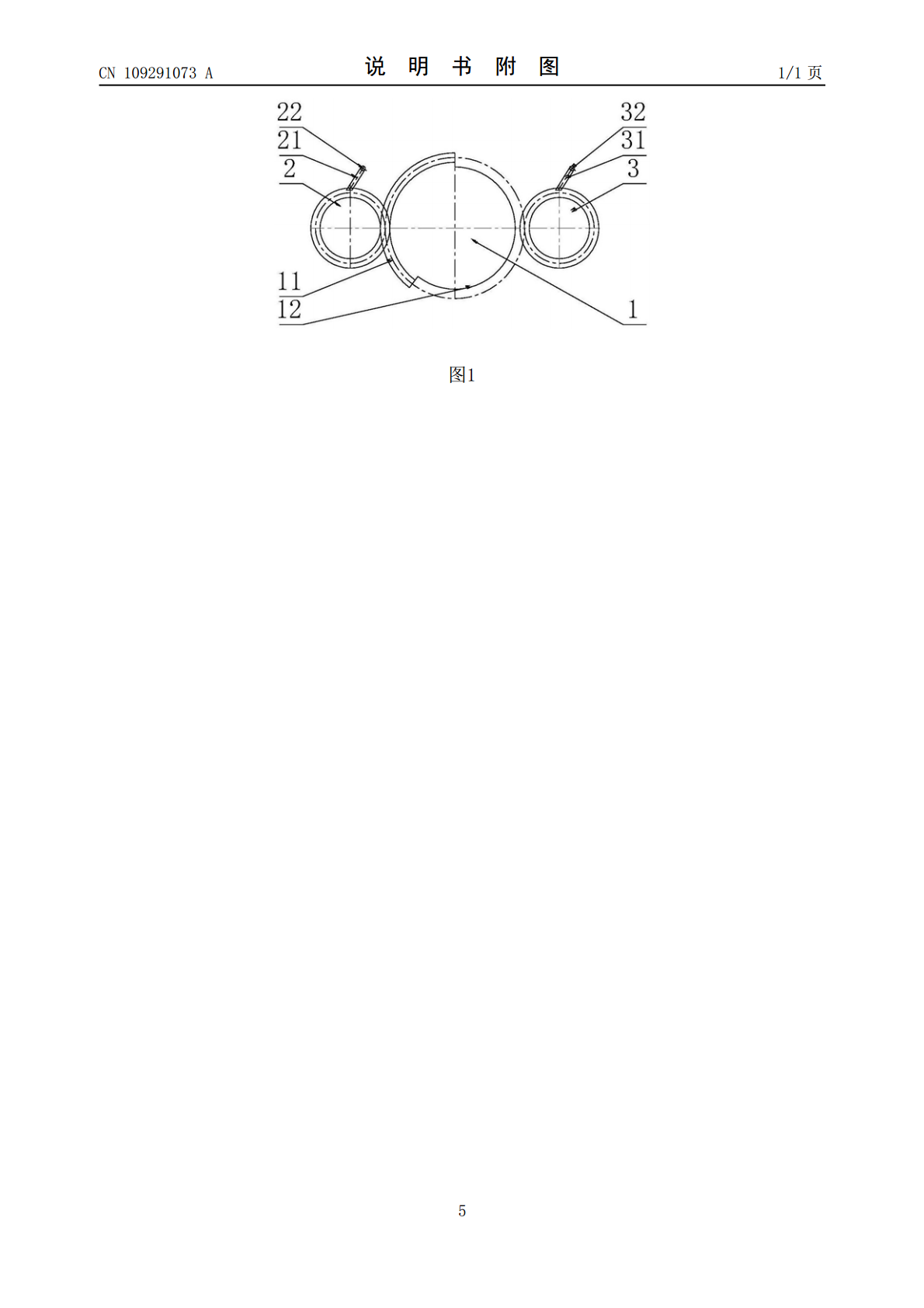
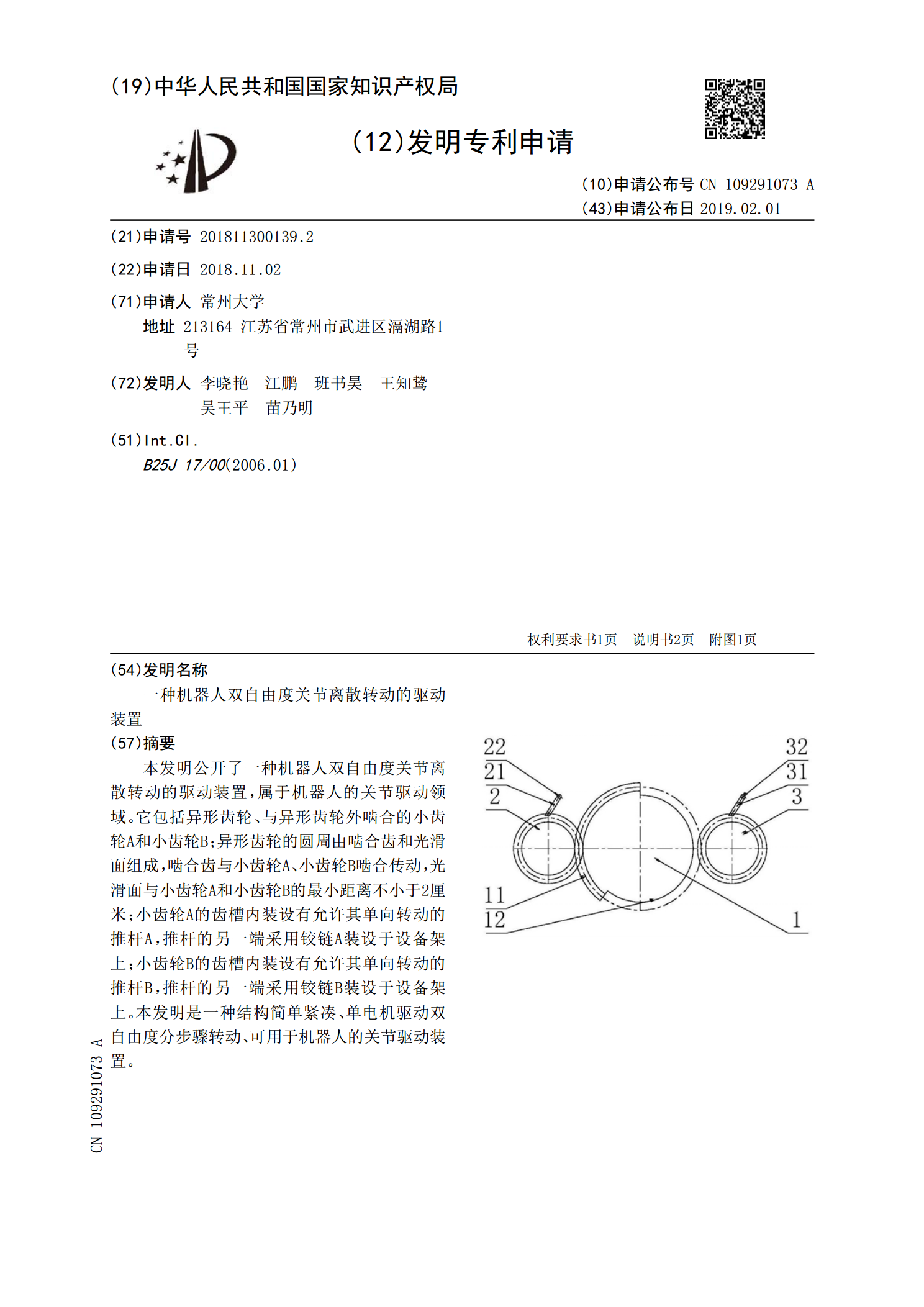
本发明公开了一种机器人双自由度关节离散转动的驱动装置,属于机器人的关节驱动领域。它包括异形齿轮、与异形齿轮外啮合的小齿轮A和小齿轮B;异形齿轮的圆周由啮合齿和光滑面组成,啮合齿与小齿轮A、小齿轮B啮合传动,光滑面与小齿轮A和小齿轮B的最小距离不小于2厘米;小齿轮A的齿槽内装设有允许其单向转动的推杆A,推杆的另一端采用铰链A装设于设备架上;小齿轮B的齿槽内装设有允许其单向转动的推杆B,推杆的另一端采用铰链B装设于设备架上。本发明是一种结构简单紧凑、单电机驱动双自由度分步骤转动、可用于机器人的关节驱动装置。

一种用于驱动机器人关节转动的装置.pdf
本发明公开了一种用于驱动机器人关节转动的装置,它包括齿轮转动机构、驱动齿轮转动机构转动的液压驱动机构,待转动机器人关节与齿轮转动机构固定相连。液压驱动机构包括第一液压缸、第二液压缸以及分别驱动第一液压缸和第二液压缸内活塞向相反的方向运动的驱动装置。齿轮转动机构包括齿轮以及平行设置的第一齿条和第二齿条,第一液压缸内活塞背离第一连接管的一侧与第一齿条一端固定相连,第二液压缸内活塞背离第二连接管的一侧与第二齿条一端固定相连,且齿轮分别与第一齿条和第二齿条相啮合。本发明相比现有技术,在能驱动机器人关节转动的前提下
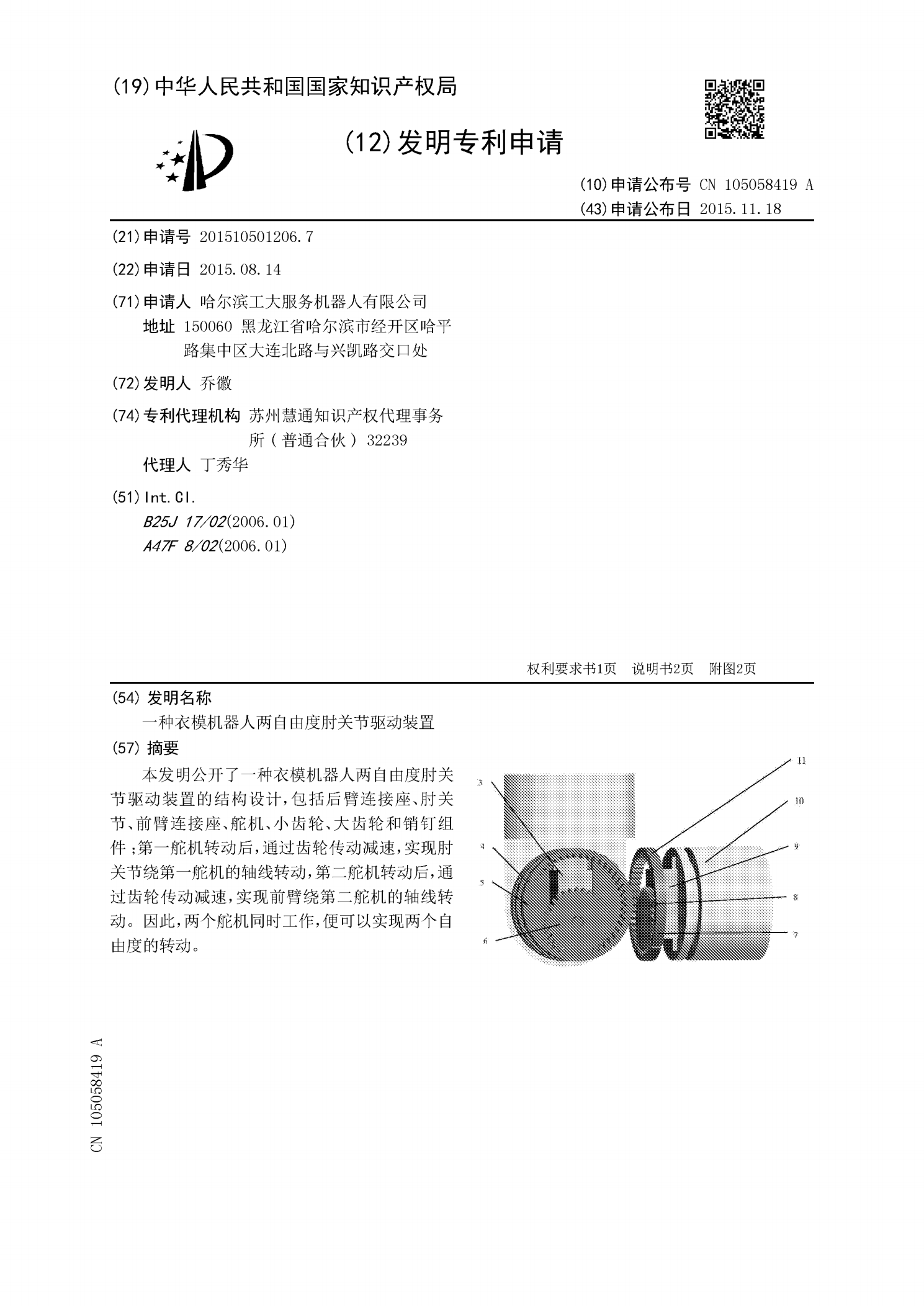
一种衣模机器人两自由度肘关节驱动装置.pdf
本发明公开了一种衣模机器人两自由度肘关节驱动装置的结构设计,包括后臂连接座、肘关节、前臂连接座、舵机、小齿轮、大齿轮和销钉组件;第一舵机转动后,通过齿轮传动减速,实现肘关节绕第一舵机的轴线转动,第二舵机转动后,通过齿轮传动减速,实现前臂绕第二舵机的轴线转动。因此,两个舵机同时工作,便可以实现两个自由度的转动。
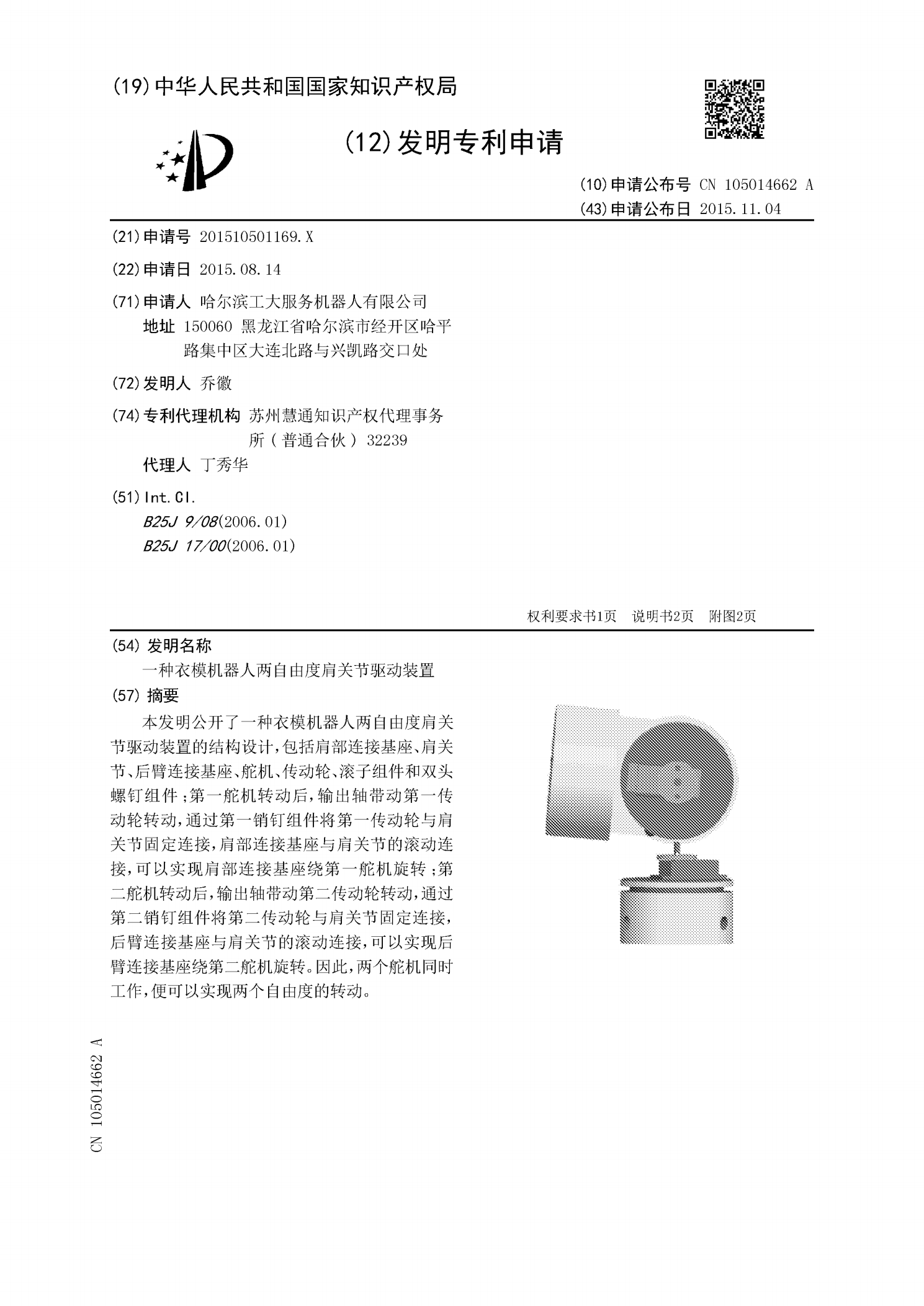
一种衣模机器人两自由度肩关节驱动装置.pdf
本发明公开了一种衣模机器人两自由度肩关节驱动装置的结构设计,包括肩部连接基座、肩关节、后臂连接基座、舵机、传动轮、滚子组件和双头螺钉组件;第一舵机转动后,输出轴带动第一传动轮转动,通过第一销钉组件将第一传动轮与肩关节固定连接,肩部连接基座与肩关节的滚动连接,可以实现肩部连接基座绕第一舵机旋转;第二舵机转动后,输出轴带动第二传动轮转动,通过第二销钉组件将第二传动轮与肩关节固定连接,后臂连接基座与肩关节的滚动连接,可以实现后臂连接基座绕第二舵机旋转。因此,两个舵机同时工作,便可以实现两个自由度的转动。
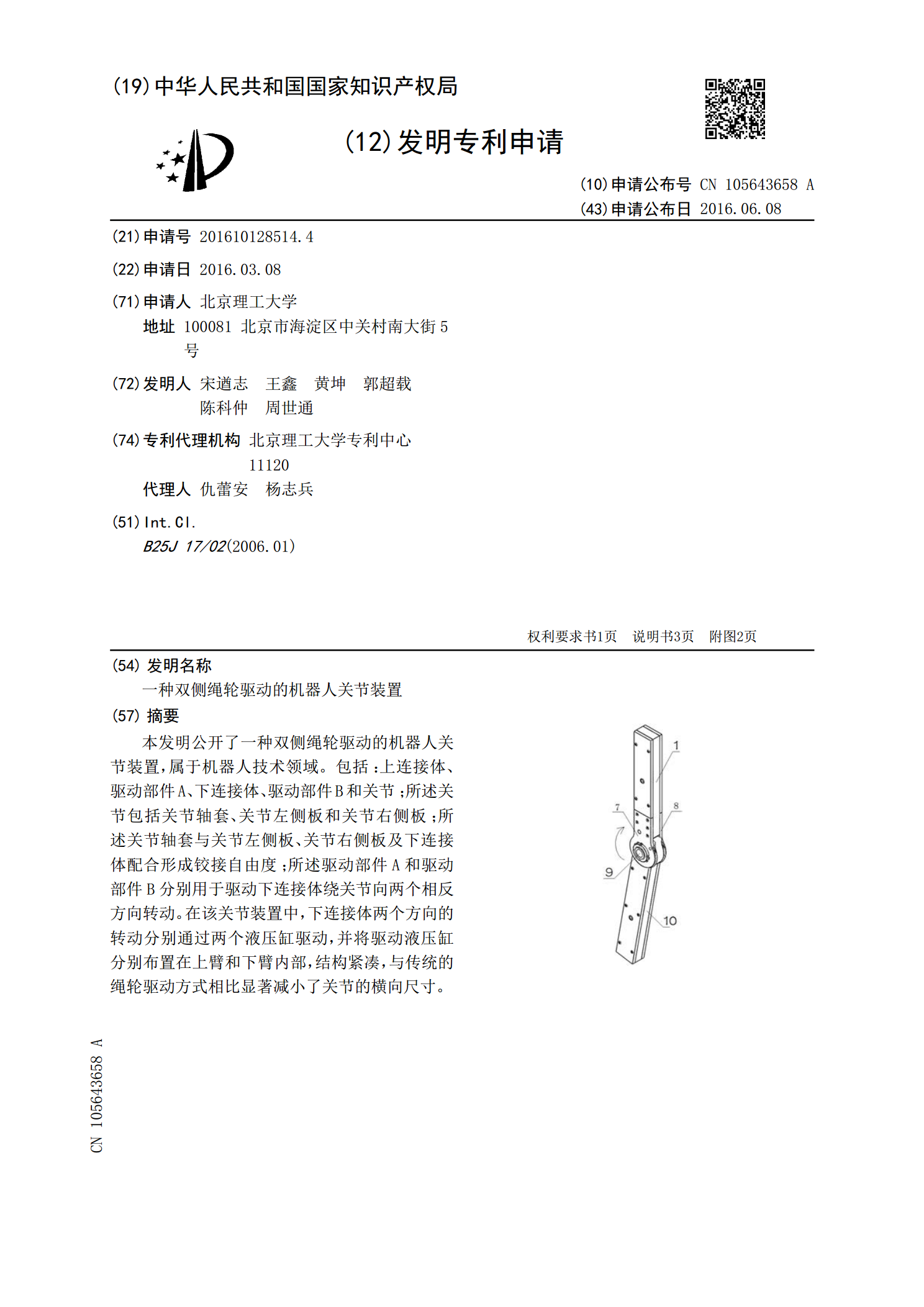
一种双侧绳轮驱动的机器人关节装置.pdf
本发明公开了一种双侧绳轮驱动的机器人关节装置,属于机器人技术领域。包括:上连接体、驱动部件A、下连接体、驱动部件B和关节;所述关节包括关节轴套、关节左侧板和关节右侧板;所述关节轴套与关节左侧板、关节右侧板及下连接体配合形成铰接自由度;所述驱动部件A和驱动部件B分别用于驱动下连接体绕关节向两个相反方向转动。在该关节装置中,下连接体两个方向的转动分别通过两个液压缸驱动,并将驱动液压缸分别布置在上臂和下臂内部,结构紧凑,与传统的绳轮驱动方式相比显著减小了关节的横向尺寸。