
一种爬墙机器人的脚掌及其吸附稳定性判断方法.pdf

春景****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种爬墙机器人的脚掌及其吸附稳定性判断方法.pdf
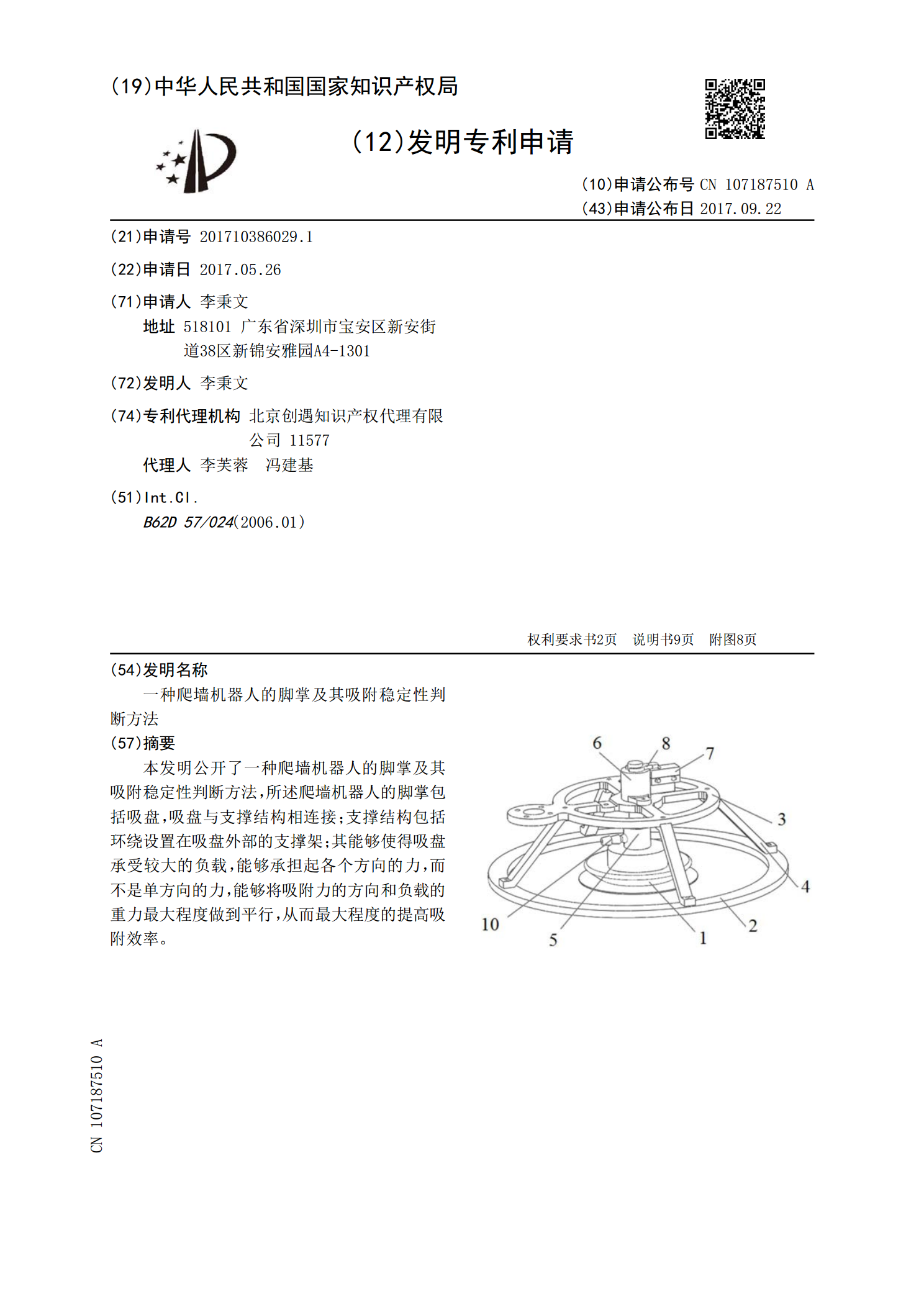
本发明公开了一种爬墙机器人的脚掌及其吸附稳定性判断方法,所述爬墙机器人的脚掌包括吸盘,吸盘与支撑结构相连接;支撑结构包括环绕设置在吸盘外部的支撑架;其能够使得吸盘承受较大的负载,能够承担起各个方向的力,而不是单方向的力,能够将吸附力的方向和负载的重力最大程度做到平行,从而最大程度的提高吸附效率。
一种爬墙机器人及其脚掌及其脚掌吸附方法.pdf
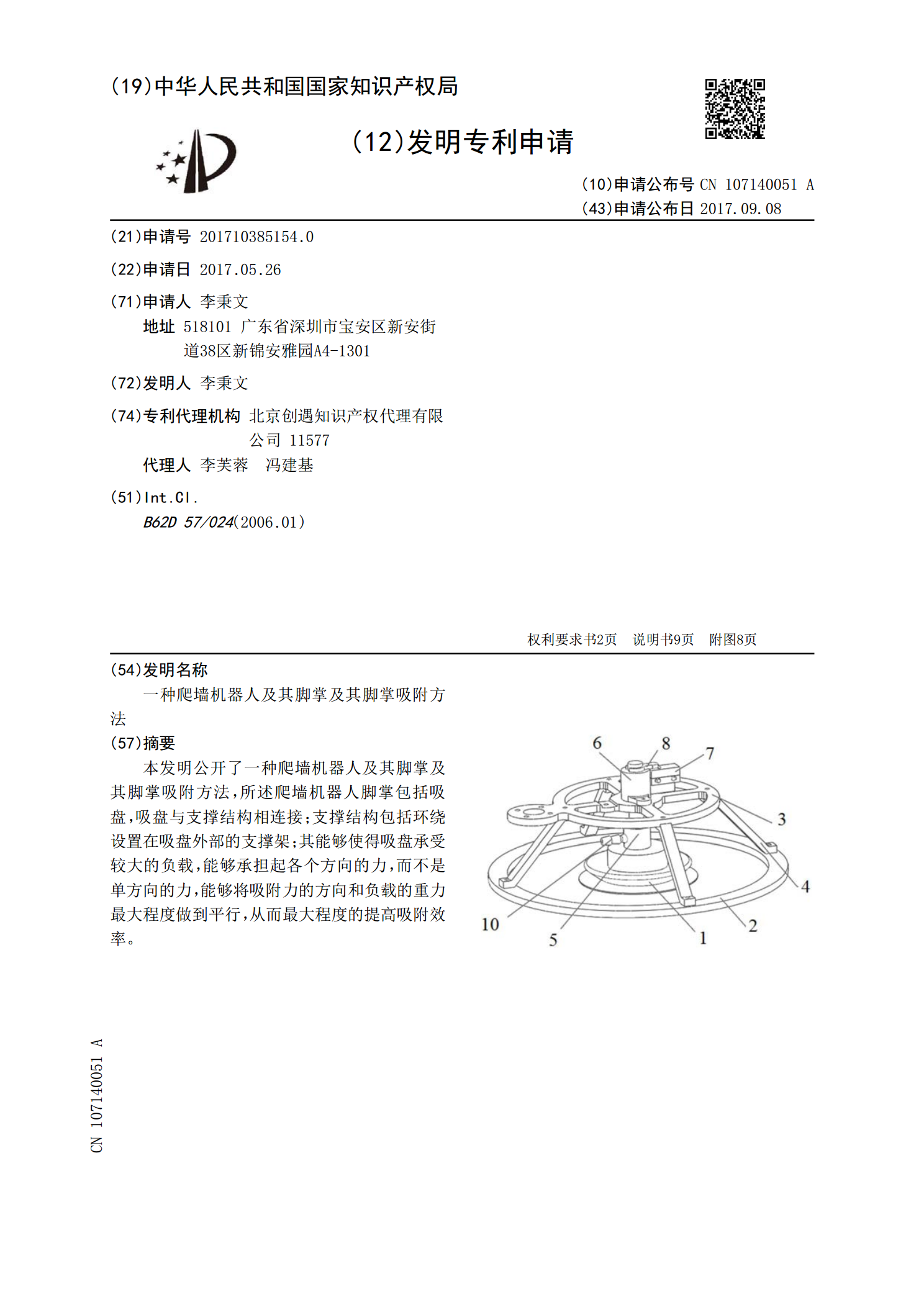
本发明公开了一种爬墙机器人及其脚掌及其脚掌吸附方法,所述爬墙机器人脚掌包括吸盘,吸盘与支撑结构相连接;支撑结构包括环绕设置在吸盘外部的支撑架;其能够使得吸盘承受较大的负载,能够承担起各个方向的力,而不是单方向的力,能够将吸附力的方向和负载的重力最大程度做到平行,从而最大程度的提高吸附效率。

多盘非接触吸附式爬墙机器人.pdf
本发明涉及一种多盘非接触吸附式爬墙机器人。机器人的机身包括四个彼此间通过柔性元件连接的吸盘,连接后机身的四个外侧顶角上各有一块固定板,步进电机、轮毂罩、推力球轴承、深沟球轴承通过轴安装于固定板上,轮子与电机1相连安装在轮毂罩内,步进电机与轮子相连;每个吸盘5的上表面上设有一个多自由度接头,所述的多自由度接头是这样构成的:泵机7固定在浮动板上,浮动板通过连杆连接在吸盘上;吸盘侧表面上固定一圈密封裙边,密封裙边与墙面相对的端面上开有沟槽,每个吸盘底部有两个万向轮。本发明结构简单、吸附可靠,有爬坡功能并对墙面不
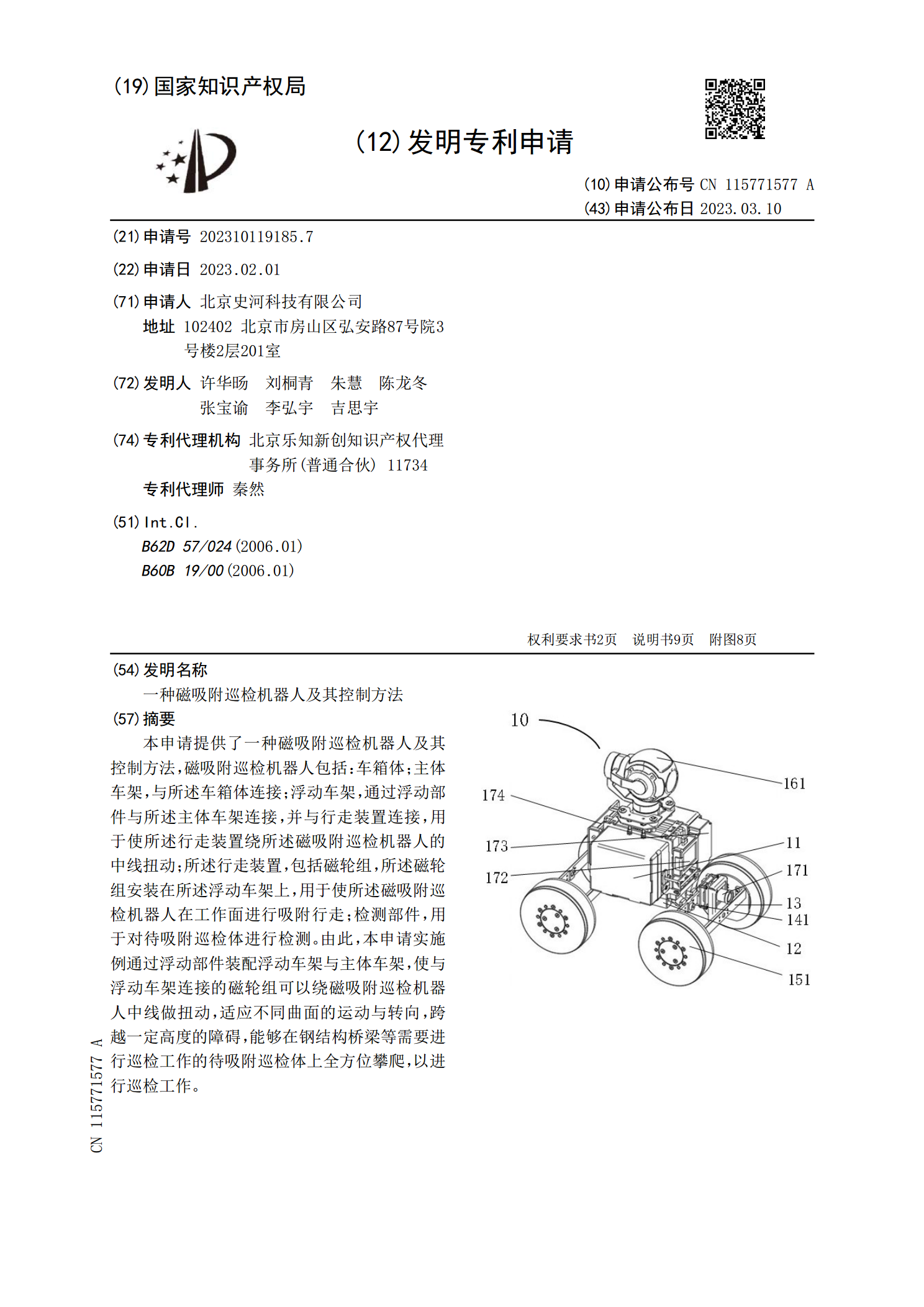
一种磁吸附巡检机器人及其控制方法.pdf
本申请提供了一种磁吸附巡检机器人及其控制方法,磁吸附巡检机器人包括:车箱体;主体车架,与所述车箱体连接;浮动车架,通过浮动部件与所述主体车架连接,并与行走装置连接,用于使所述行走装置绕所述磁吸附巡检机器人的中线扭动;所述行走装置,包括磁轮组,所述磁轮组安装在所述浮动车架上,用于使所述磁吸附巡检机器人在工作面进行吸附行走;检测部件,用于对待吸附巡检体进行检测。由此,本申请实施例通过浮动部件装配浮动车架与主体车架,使与浮动车架连接的磁轮组可以绕磁吸附巡检机器人中线做扭动,适应不同曲面的运动与转向,跨越一定高度
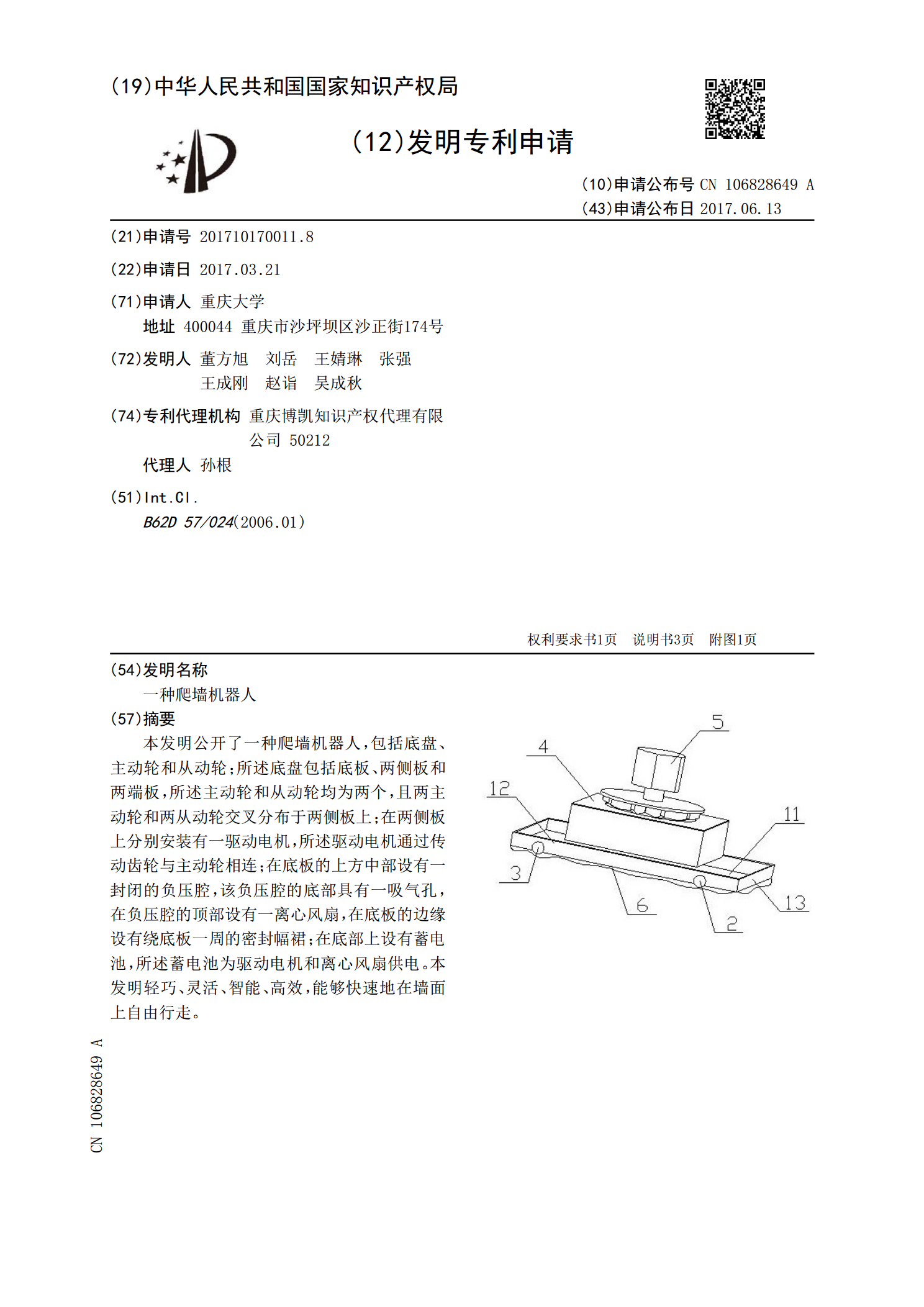
一种爬墙机器人.pdf
本发明公开了一种爬墙机器人,包括底盘、主动轮和从动轮;所述底盘包括底板、两侧板和两端板,所述主动轮和从动轮均为两个,且两主动轮和两从动轮交叉分布于两侧板上;在两侧板上分别安装有一驱动电机,所述驱动电机通过传动齿轮与主动轮相连;在底板的上方中部设有一封闭的负压腔,该负压腔的底部具有一吸气孔,在负压腔的顶部设有一离心风扇,在底板的边缘设有绕底板一周的密封幅裙;在底部上设有蓄电池,所述蓄电池为驱动电机和离心风扇供电。本发明轻巧、灵活、智能、高效,能够快速地在墙面上自由行走。