
一种爬墙机器人.pdf

大渊****公主

1/6

2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种爬墙机器人.pdf
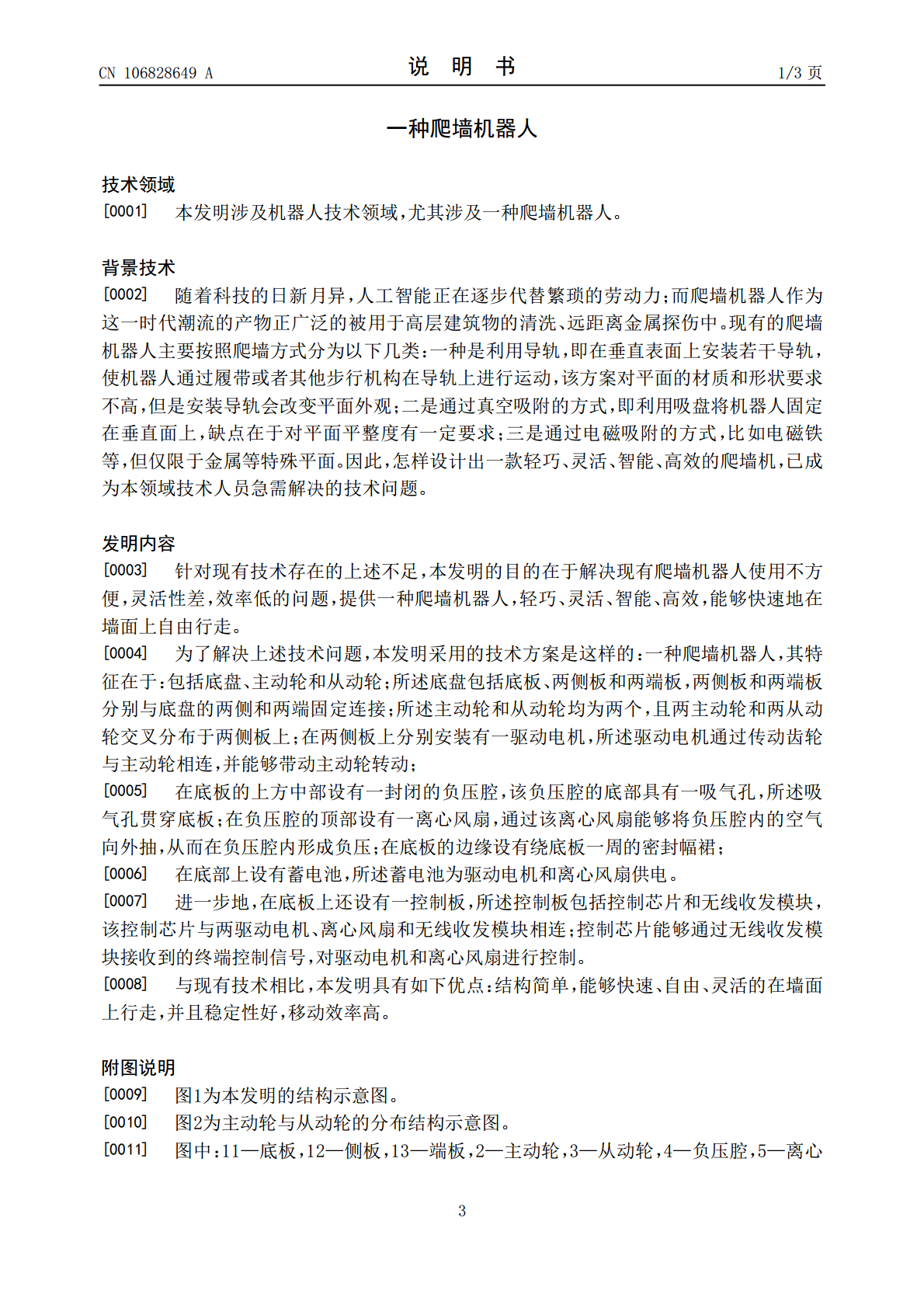
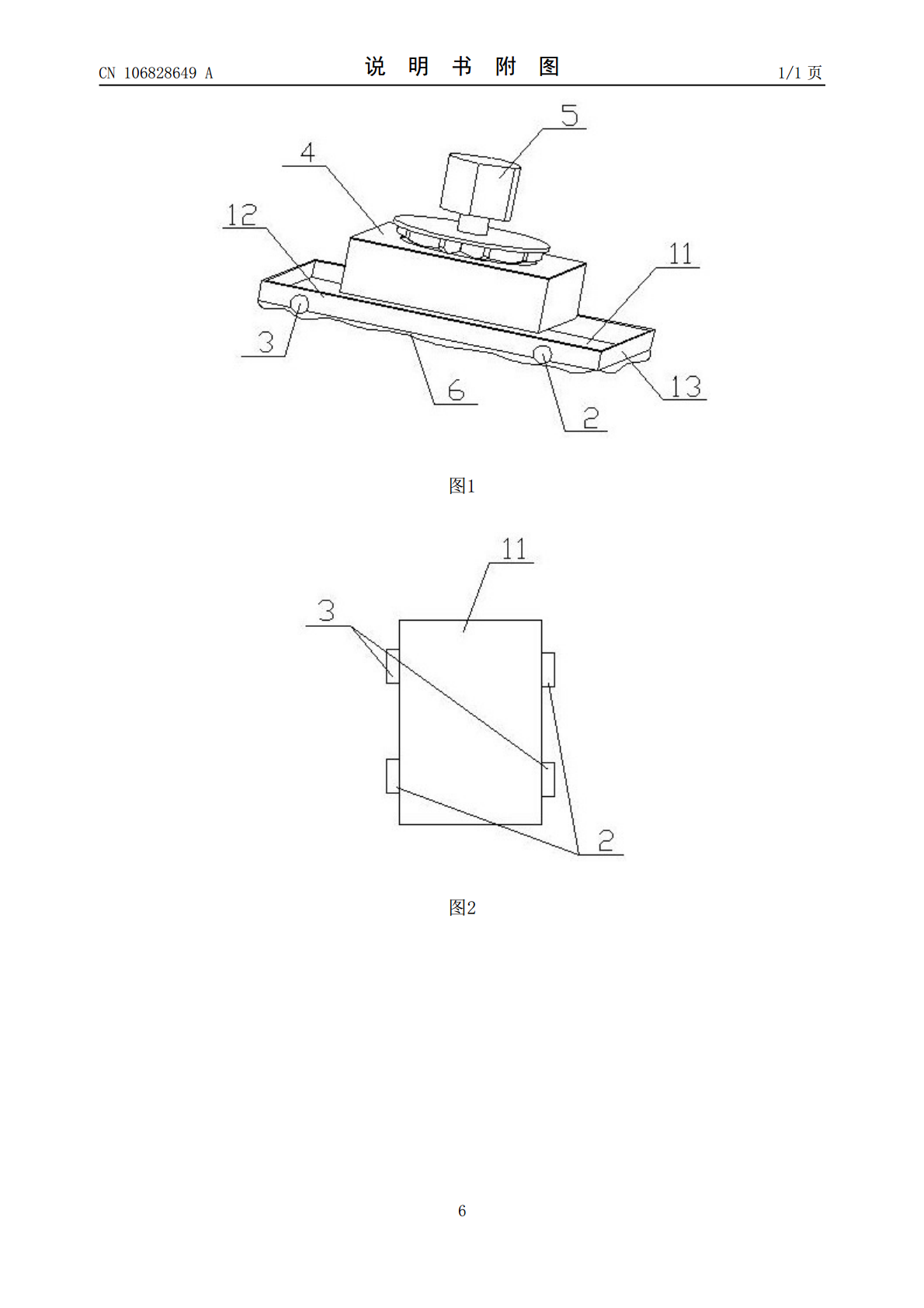
本发明公开了一种爬墙机器人,包括底盘、主动轮和从动轮;所述底盘包括底板、两侧板和两端板,所述主动轮和从动轮均为两个,且两主动轮和两从动轮交叉分布于两侧板上;在两侧板上分别安装有一驱动电机,所述驱动电机通过传动齿轮与主动轮相连;在底板的上方中部设有一封闭的负压腔,该负压腔的底部具有一吸气孔,在负压腔的顶部设有一离心风扇,在底板的边缘设有绕底板一周的密封幅裙;在底部上设有蓄电池,所述蓄电池为驱动电机和离心风扇供电。本发明轻巧、灵活、智能、高效,能够快速地在墙面上自由行走。
一种爬墙机器人.pdf
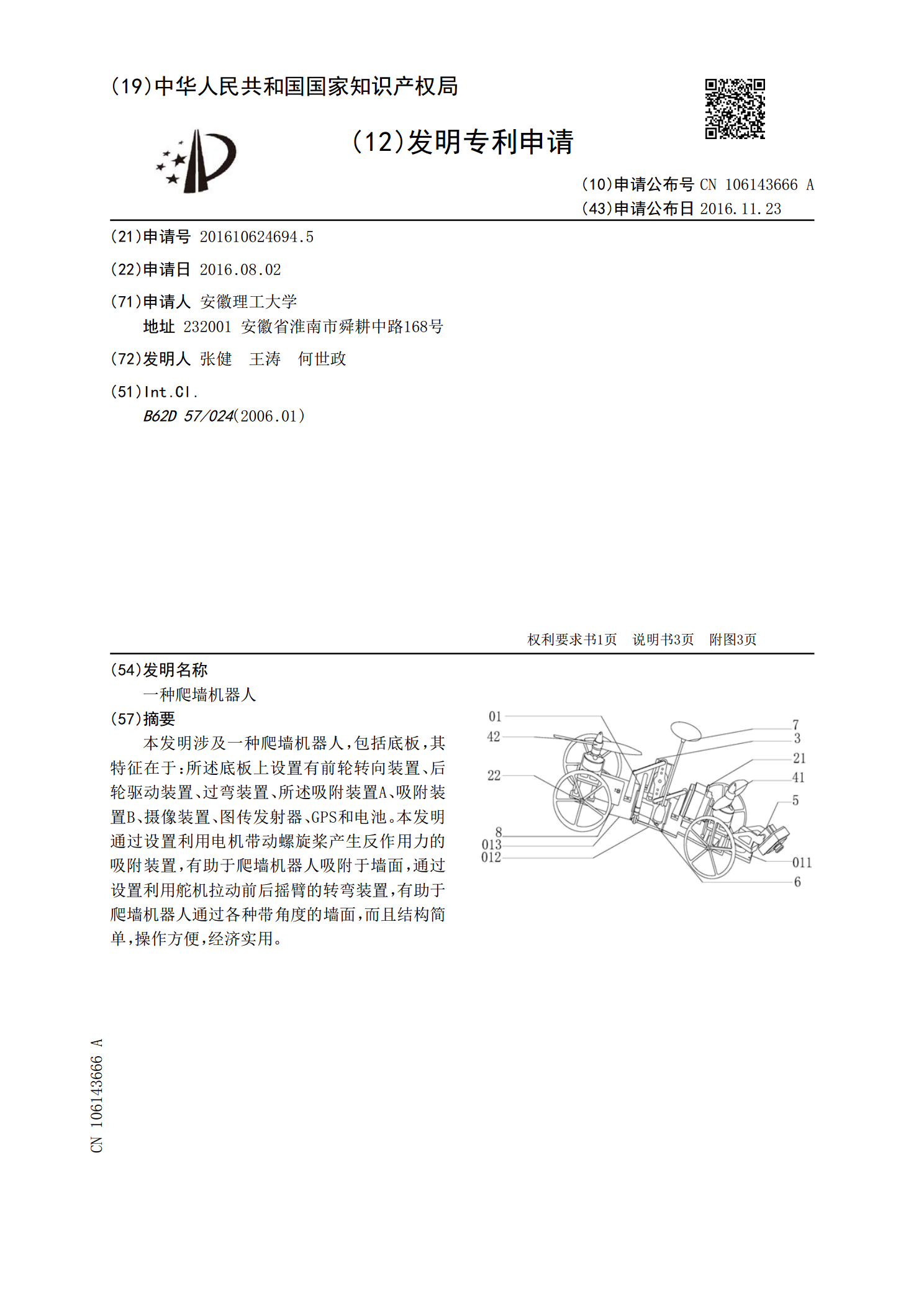
本发明涉及一种爬墙机器人,包括底板,其特征在于:所述底板上设置有前轮转向装置、后轮驱动装置、过弯装置、所述吸附装置A、吸附装置B、摄像装置、图传发射器、GPS和电池。本发明通过设置利用电机带动螺旋桨产生反作用力的吸附装置,有助于爬墙机器人吸附于墙面,通过设置利用舵机拉动前后摇臂的转弯装置,有助于爬墙机器人通过各种带角度的墙面,而且结构简单,操作方便,经济实用。
一种外墙角爬墙机器人.pdf
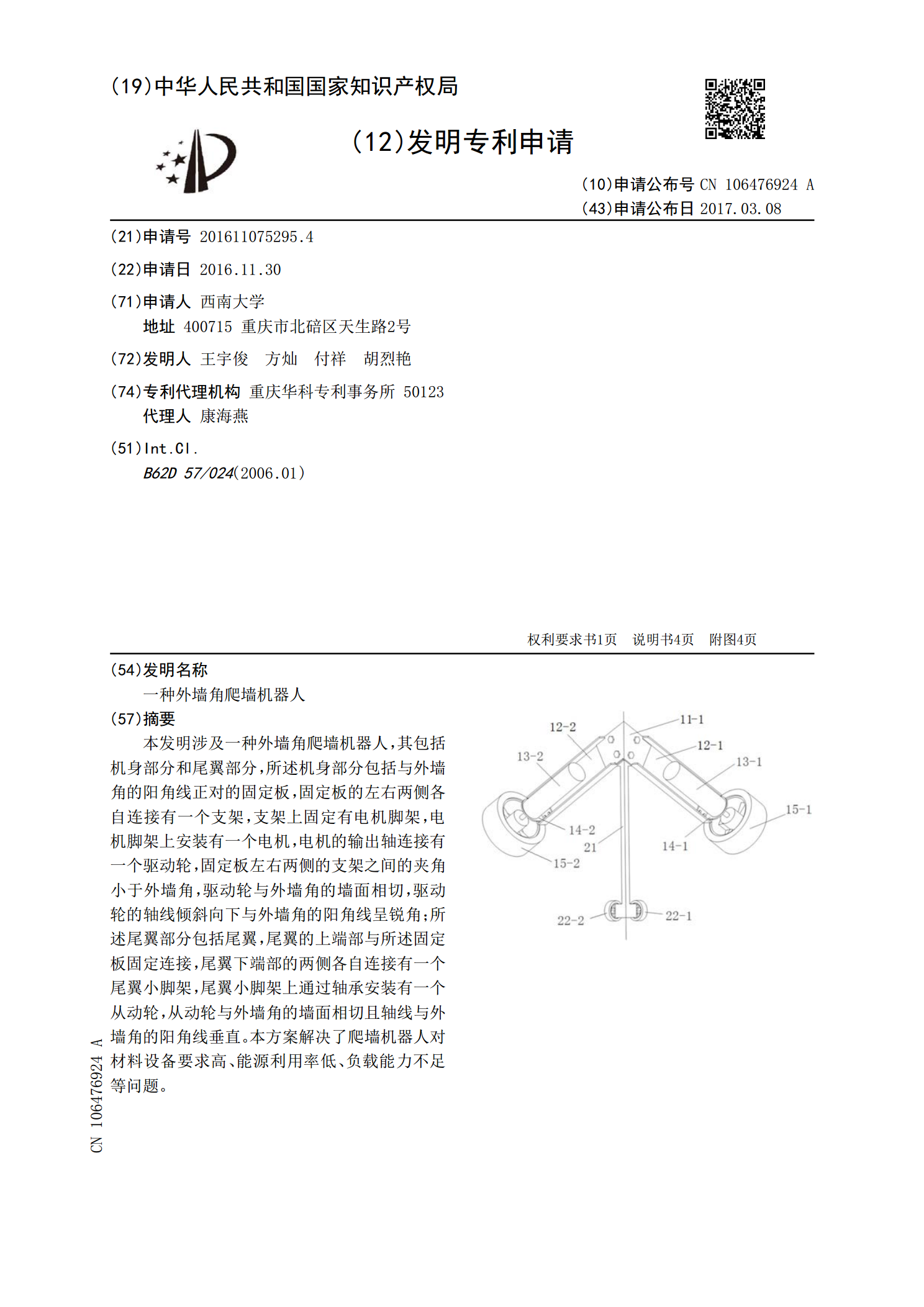
本发明涉及一种外墙角爬墙机器人,其包括机身部分和尾翼部分,所述机身部分包括与外墙角的阳角线正对的固定板,固定板的左右两侧各自连接有一个支架,支架上固定有电机脚架,电机脚架上安装有一个电机,电机的输出轴连接有一个驱动轮,固定板左右两侧的支架之间的夹角小于外墙角,驱动轮与外墙角的墙面相切,驱动轮的轴线倾斜向下与外墙角的阳角线呈锐角;所述尾翼部分包括尾翼,尾翼的上端部与所述固定板固定连接,尾翼下端部的两侧各自连接有一个尾翼小脚架,尾翼小脚架上通过轴承安装有一个从动轮,从动轮与外墙角的墙面相切且轴线与外墙角的阳角
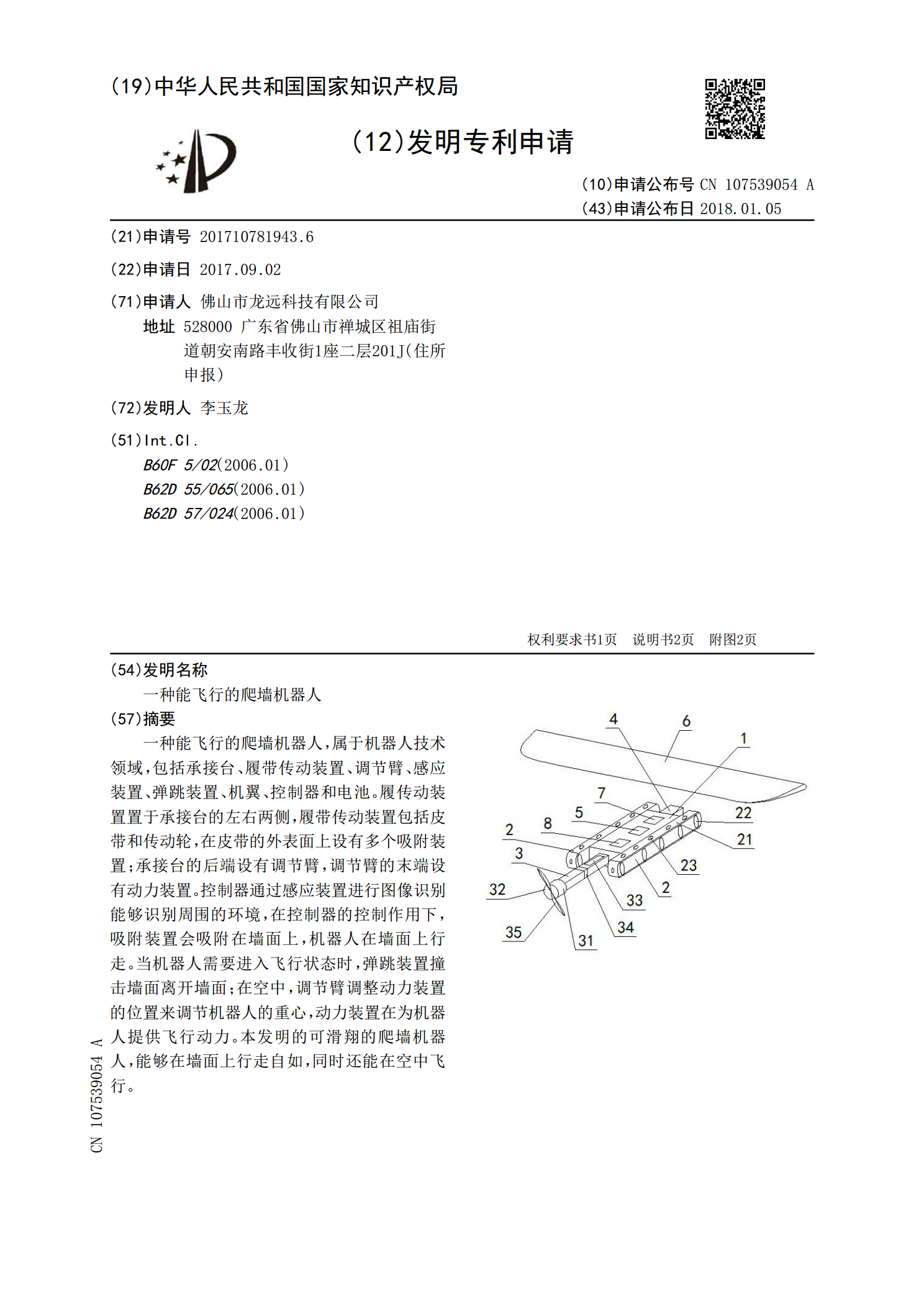
一种能飞行的爬墙机器人.pdf
一种能飞行的爬墙机器人,属于机器人技术领域,包括承接台、履带传动装置、调节臂、感应装置、弹跳装置、机翼、控制器和电池。履传动装置置于承接台的左右两侧,履带传动装置包括皮带和传动轮,在皮带的外表面上设有多个吸附装置;承接台的后端设有调节臂,调节臂的末端设有动力装置。控制器通过感应装置进行图像识别能够识别周围的环境,在控制器的控制作用下,吸附装置会吸附在墙面上,机器人在墙面上行走。当机器人需要进入飞行状态时,弹跳装置撞击墙面离开墙面;在空中,调节臂调整动力装置的位置来调节机器人的重心,动力装置在为机器人提供飞
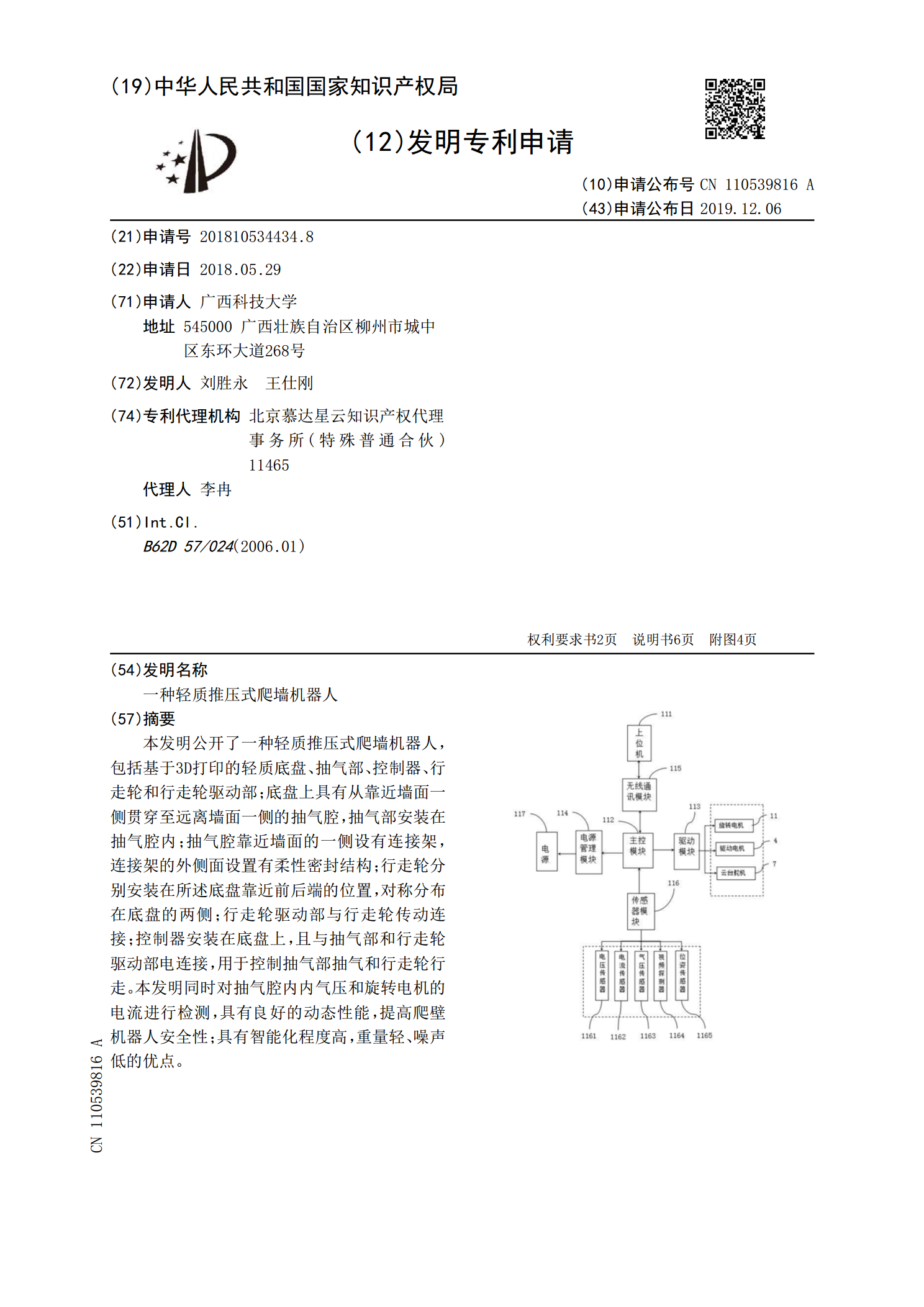
一种轻质推压式爬墙机器人.pdf
本发明公开了一种轻质推压式爬墙机器人,包括基于3D打印的轻质底盘、抽气部、控制器、行走轮和行走轮驱动部;底盘上具有从靠近墙面一侧贯穿至远离墙面一侧的抽气腔,抽气部安装在抽气腔内;抽气腔靠近墙面的一侧设有连接架,连接架的外侧面设置有柔性密封结构;行走轮分别安装在所述底盘靠近前后端的位置,对称分布在底盘的两侧;行走轮驱动部与行走轮传动连接;控制器安装在底盘上,且与抽气部和行走轮驱动部电连接,用于控制抽气部抽气和行走轮行走。本发明同时对抽气腔内内气压和旋转电机的电流进行检测,具有良好的动态性能,提高爬壁机器人安