
一种磁吸附巡检机器人及其控制方法.pdf

元枫****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种磁吸附巡检机器人及其控制方法.pdf
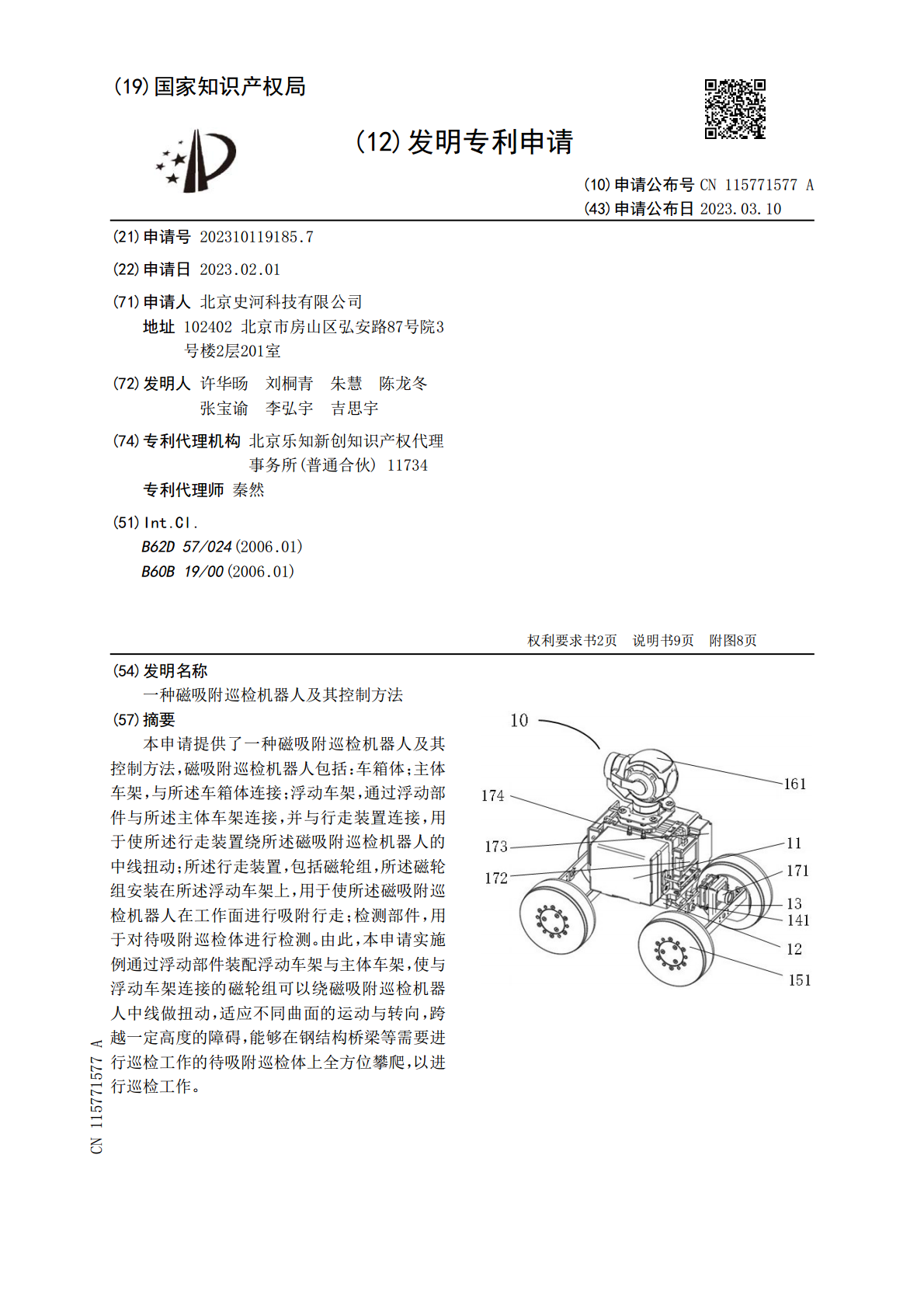
本申请提供了一种磁吸附巡检机器人及其控制方法,磁吸附巡检机器人包括:车箱体;主体车架,与所述车箱体连接;浮动车架,通过浮动部件与所述主体车架连接,并与行走装置连接,用于使所述行走装置绕所述磁吸附巡检机器人的中线扭动;所述行走装置,包括磁轮组,所述磁轮组安装在所述浮动车架上,用于使所述磁吸附巡检机器人在工作面进行吸附行走;检测部件,用于对待吸附巡检体进行检测。由此,本申请实施例通过浮动部件装配浮动车架与主体车架,使与浮动车架连接的磁轮组可以绕磁吸附巡检机器人中线做扭动,适应不同曲面的运动与转向,跨越一定高度
一种用于曲面检测的磁吸附机器人及其控制方法.pdf
本发明公开了一种用于曲面检测的磁吸附机器人及其控制方法,包括机器人机身、机器人运动控制器、机器人磁吸附控制器、电机驱动器、电机、磁吸附车轮以及至少一个信息采集传感器;机器人运动控制器设在机器人机身上,与电机驱动器连接,电机驱动器与电机连接,通过电机驱动磁吸附车轮,控制机器人运动;磁吸附车轮上设有磁吸附装置,机器人磁吸附控制器与磁吸附装置连接;还设有上位机和压力传感器,通过与机器人配合实现两种控制模式。本发明解决了在面对变曲面、过渡面等工作环境时,因为工作间隙增大、磁吸附力减小导致机器人掉落的问题。
一种磁吸附式钢丝绳巡检机器人.pdf
本发明公开了一种磁吸附式矿井钢丝绳巡检机器人,包括电机驱动机构、第一小齿轮、第二小齿轮、第三小齿轮、第一大齿轮、第二大齿轮、传动轴、履带。第一小齿轮与第一大齿轮构成第一锥齿轮结构,第一大齿轮与第二小齿轮构成第二锥齿轮结构,第三小齿轮与第二大齿轮构成第三锥齿轮结构。电机驱动机构驱动第一小齿轮,第一小齿轮通过第一锥齿轮结构、第二锥齿轮结构、传动轴、第三锥齿轮结构实现第一带轮结构的履带和第二带轮结构的履带的同步转动。本发明通过履带上的吸附检测装置实现矿井钢丝绳巡检机器人相对钢丝绳的运动,并通过吸附检测装置检测钢

一种烟雾巡检机器人及其控制方法.pdf
本发明公开了一种烟雾巡检机器人及其控制方法。在机器人本体中设置信息采集模块用于外部信息和烟雾图像的采集,设置信息处理模块用于处理所采集的数据,根据所采集数据得出网格地图,设置控制模块响应信息处理模块的运动控制信息输出移动信息。同时设置有带麦克纳姆轮的移动模块用于接收移动信息并控制麦克纳姆轮移动。实现了移动巡检,有效地扩大了巡检的范围。
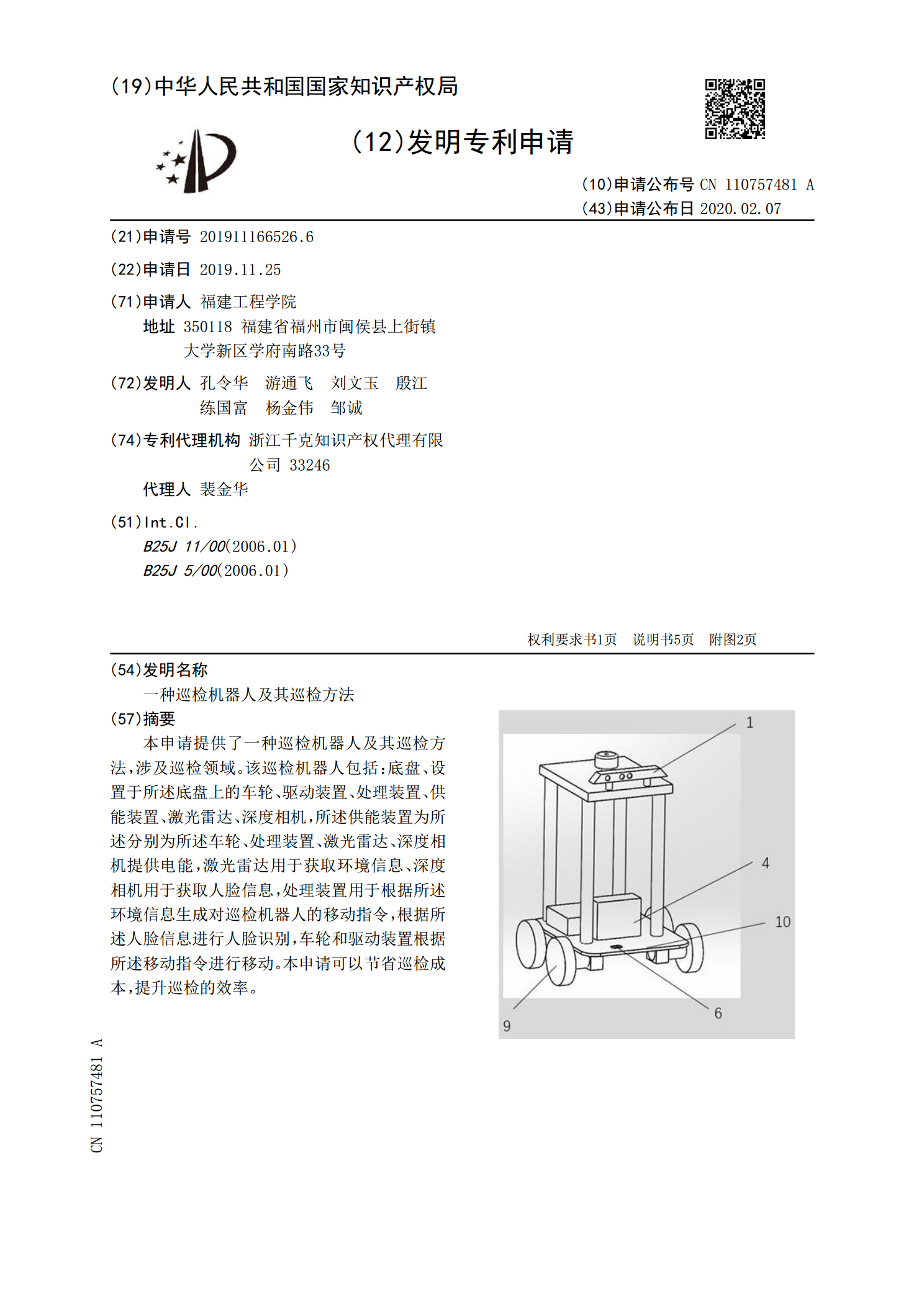
一种巡检机器人及其巡检方法.pdf
本申请提供了一种巡检机器人及其巡检方法,涉及巡检领域。该巡检机器人包括:底盘、设置于所述底盘上的车轮、驱动装置、处理装置、供能装置、激光雷达、深度相机,所述供能装置为所述分别为所述车轮、处理装置、激光雷达、深度相机提供电能,激光雷达用于获取环境信息、深度相机用于获取人脸信息,处理装置用于根据所述环境信息生成对巡检机器人的移动指令,根据所述人脸信息进行人脸识别,车轮和驱动装置根据所述移动指令进行移动。本申请可以节省巡检成本,提升巡检的效率。