
多盘非接触吸附式爬墙机器人.pdf

努力****向丝


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多盘非接触吸附式爬墙机器人.pdf
本发明涉及一种多盘非接触吸附式爬墙机器人。机器人的机身包括四个彼此间通过柔性元件连接的吸盘,连接后机身的四个外侧顶角上各有一块固定板,步进电机、轮毂罩、推力球轴承、深沟球轴承通过轴安装于固定板上,轮子与电机1相连安装在轮毂罩内,步进电机与轮子相连;每个吸盘5的上表面上设有一个多自由度接头,所述的多自由度接头是这样构成的:泵机7固定在浮动板上,浮动板通过连杆连接在吸盘上;吸盘侧表面上固定一圈密封裙边,密封裙边与墙面相对的端面上开有沟槽,每个吸盘底部有两个万向轮。本发明结构简单、吸附可靠,有爬坡功能并对墙面不
轮足组合越障非接触磁吸附式爬壁机器人系统.pdf
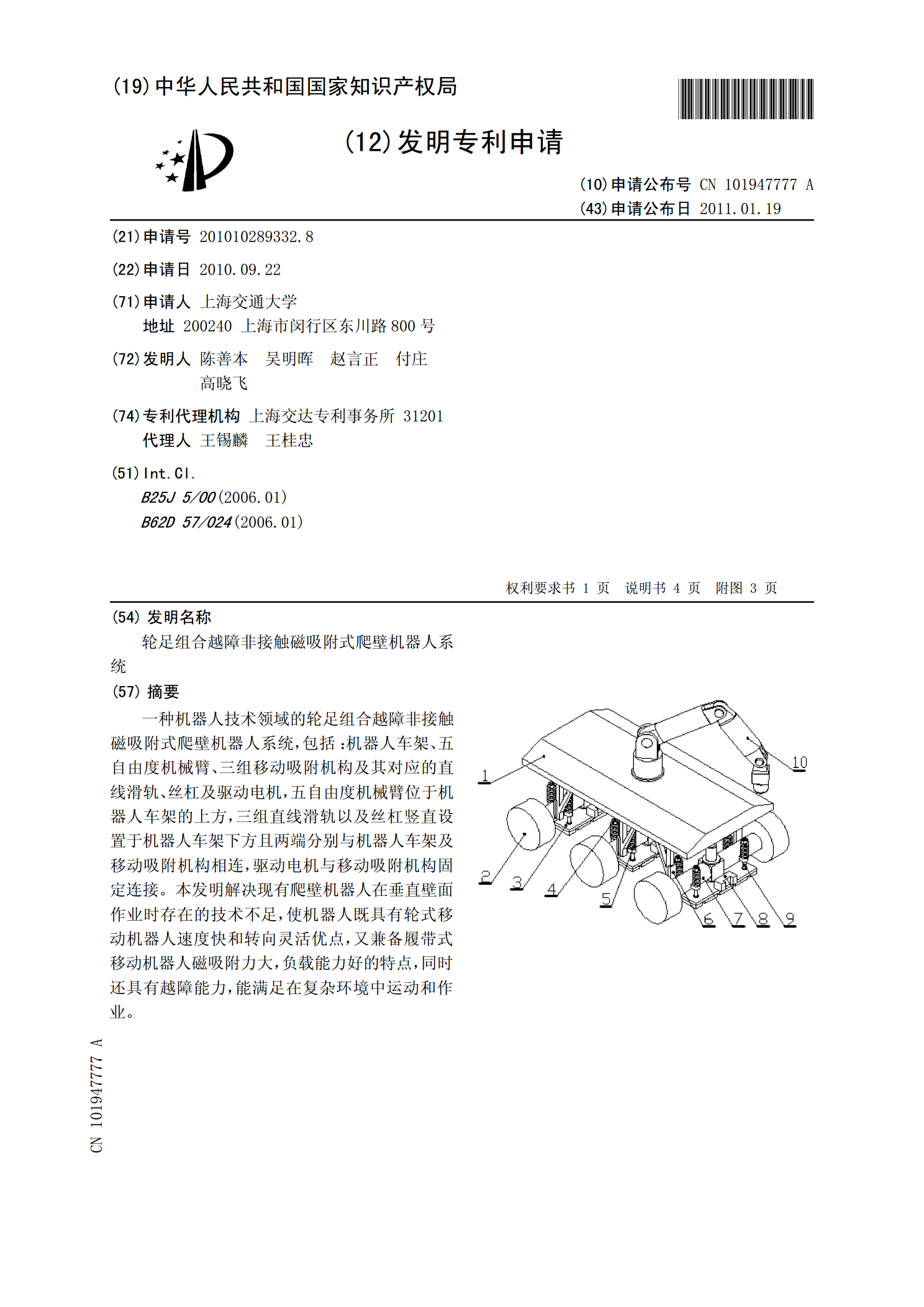
一种机器人技术领域的轮足组合越障非接触磁吸附式爬壁机器人系统,包括:机器人车架、五自由度机械臂、三组移动吸附机构及其对应的直线滑轨、丝杠及驱动电机,五自由度机械臂位于机器人车架的上方,三组直线滑轨以及丝杠竖直设置于机器人车架下方且两端分别与机器人车架及移动吸附机构相连,驱动电机与移动吸附机构固定连接。本发明解决现有爬壁机器人在垂直壁面作业时存在的技术不足,使机器人既具有轮式移动机器人速度快和转向灵活优点,又兼备履带式移动机器人磁吸附力大,负载能力好的特点,同时还具有越障能力,能满足在复杂环境中运动和作业。

双足吸附式爬墙机器人方案设计及实验分析.docx
双足吸附式爬墙机器人方案设计及实验分析标题:双足吸附式爬墙机器人方案设计及实验分析摘要:双足吸附式爬墙机器人是一种能够在墙面上爬行的机器人系统,其通过吸附技术实现对墙面的附着。本论文提出了一种双足吸附式爬墙机器人的设计方案,并进行了相关实验分析。设计方案主要包括机器人结构设计、吸附技术选择、姿态控制和动力系统设计等。实验分析主要通过对机器人在不同墙面条件下的爬升性能、稳定性和能耗进行评估,验证设计方案的可行性和优势。关键词:双足吸附式爬墙机器人,吸附技术,姿态控制,爬升性能,稳定性,能耗一、引言在建筑施工

非接触变磁吸附式管道攀爬机器人的结构创新设计与姿态跟踪控制.docx
非接触变磁吸附式管道攀爬机器人的结构创新设计与姿态跟踪控制非接触变磁吸附式管道攀爬机器人的结构创新设计与姿态跟踪控制摘要:随着对管道系统监测与维修需求的增加,管道攀爬机器人具有重要意义。本论文以非接触变磁吸附式管道攀爬机器人为研究对象,结合结构创新设计与姿态跟踪控制方法,提出了一种有效的解决方案。该机器人利用变磁吸附技术实现对管道的附着,并通过姿态跟踪控制模块实现灵活的管道行进。本文阐述了机器人的结构设计与创新,以及姿态跟踪控制方法的设计与实现。实验结果表明,该机器人具有良好的工作性能和稳定性,可以满足实
多光谱非接触式积雪检测装置.pdf
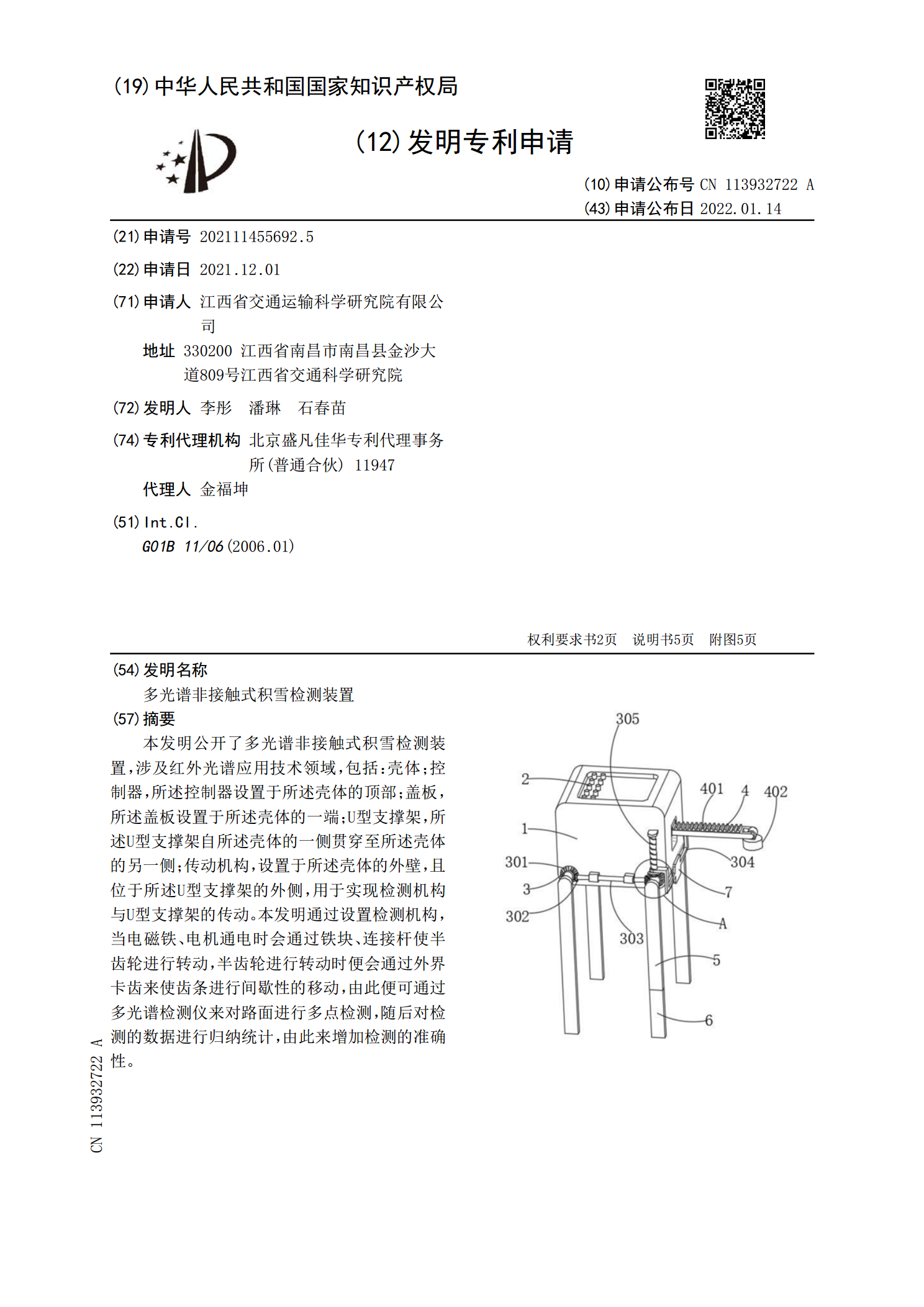
本发明公开了多光谱非接触式积雪检测装置,涉及红外光谱应用技术领域,包括:壳体;控制器,所述控制器设置于所述壳体的顶部;盖板,所述盖板设置于所述壳体的一端;U型支撑架,所述U型支撑架自所述壳体的一侧贯穿至所述壳体的另一侧;传动机构,设置于所述壳体的外壁,且位于所述U型支撑架的外侧,用于实现检测机构与U型支撑架的传动。本发明通过设置检测机构,当电磁铁、电机通电时会通过铁块、连接杆使半齿轮进行转动,半齿轮进行转动时便会通过外界卡齿来使齿条进行间歇性的移动,由此便可通过多光谱检测仪来对路面进行多点检测,随后对检测