
一种激光雷达内参标定方法及装置.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光雷达内参标定方法及装置.pdf
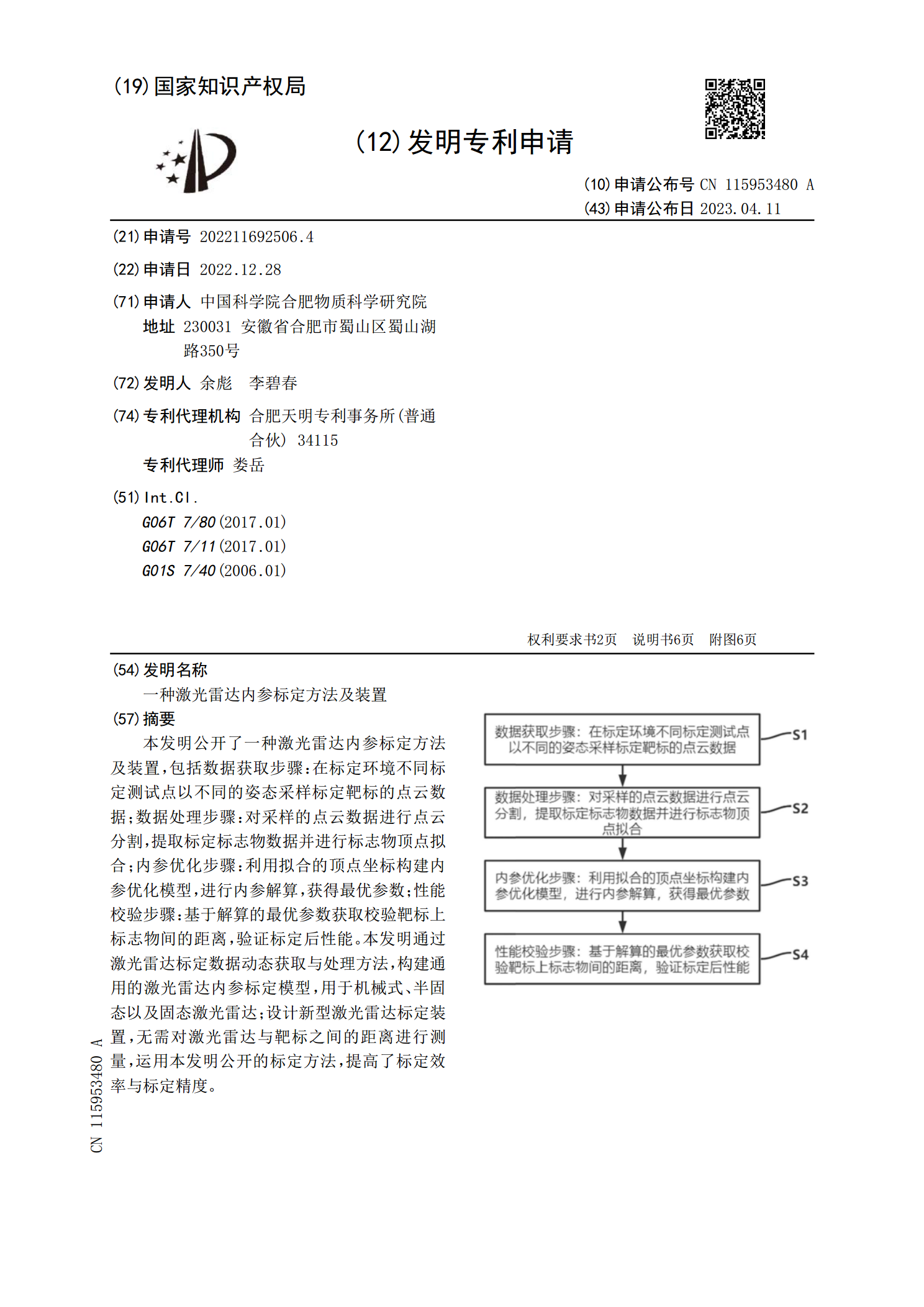
本发明公开了一种激光雷达内参标定方法及装置,包括数据获取步骤:在标定环境不同标定测试点以不同的姿态采样标定靶标的点云数据;数据处理步骤:对采样的点云数据进行点云分割,提取标定标志物数据并进行标志物顶点拟合;内参优化步骤:利用拟合的顶点坐标构建内参优化模型,进行内参解算,获得最优参数;性能校验步骤:基于解算的最优参数获取校验靶标上标志物间的距离,验证标定后性能。本发明通过激光雷达标定数据动态获取与处理方法,构建通用的激光雷达内参标定模型,用于机械式、半固态以及固态激光雷达;设计新型激光雷达标定装置,无需对激
一种激光雷达的标定方法、装置及存储介质.pdf
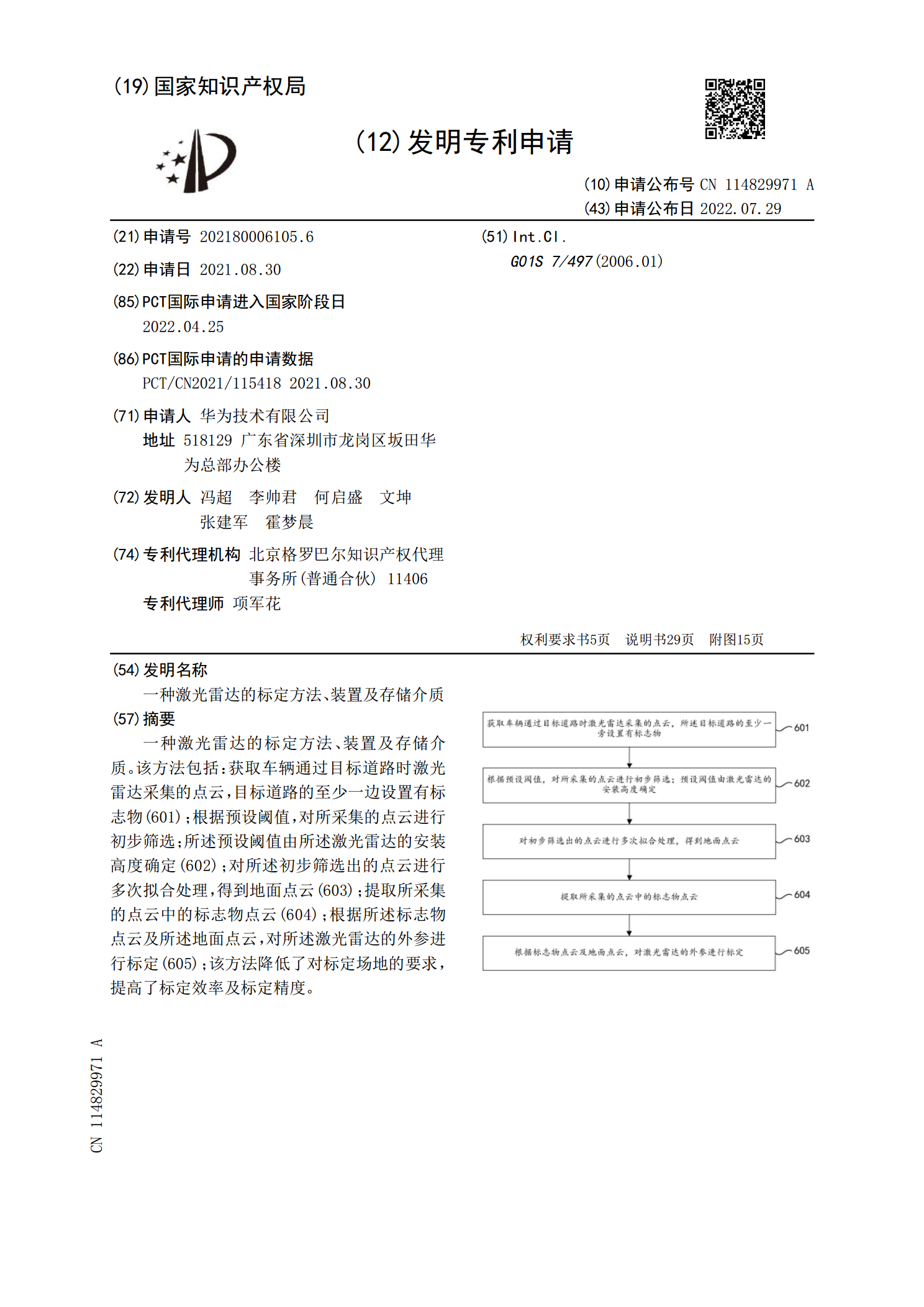
一种激光雷达的标定方法、装置及存储介质。该方法包括:获取车辆通过目标道路时激光雷达采集的点云,目标道路的至少一边设置有标志物(601);根据预设阈值,对所采集的点云进行初步筛选;所述预设阈值由所述激光雷达的安装高度确定(602);对所述初步筛选出的点云进行多次拟合处理,得到地面点云(603);提取所采集的点云中的标志物点云(604);根据所述标志物点云及所述地面点云,对所述激光雷达的外参进行标定(605);该方法降低了对标定场地的要求,提高了标定效率及标定精度。
一种激光雷达与视觉相机的外参标定装置及标定方法.pdf
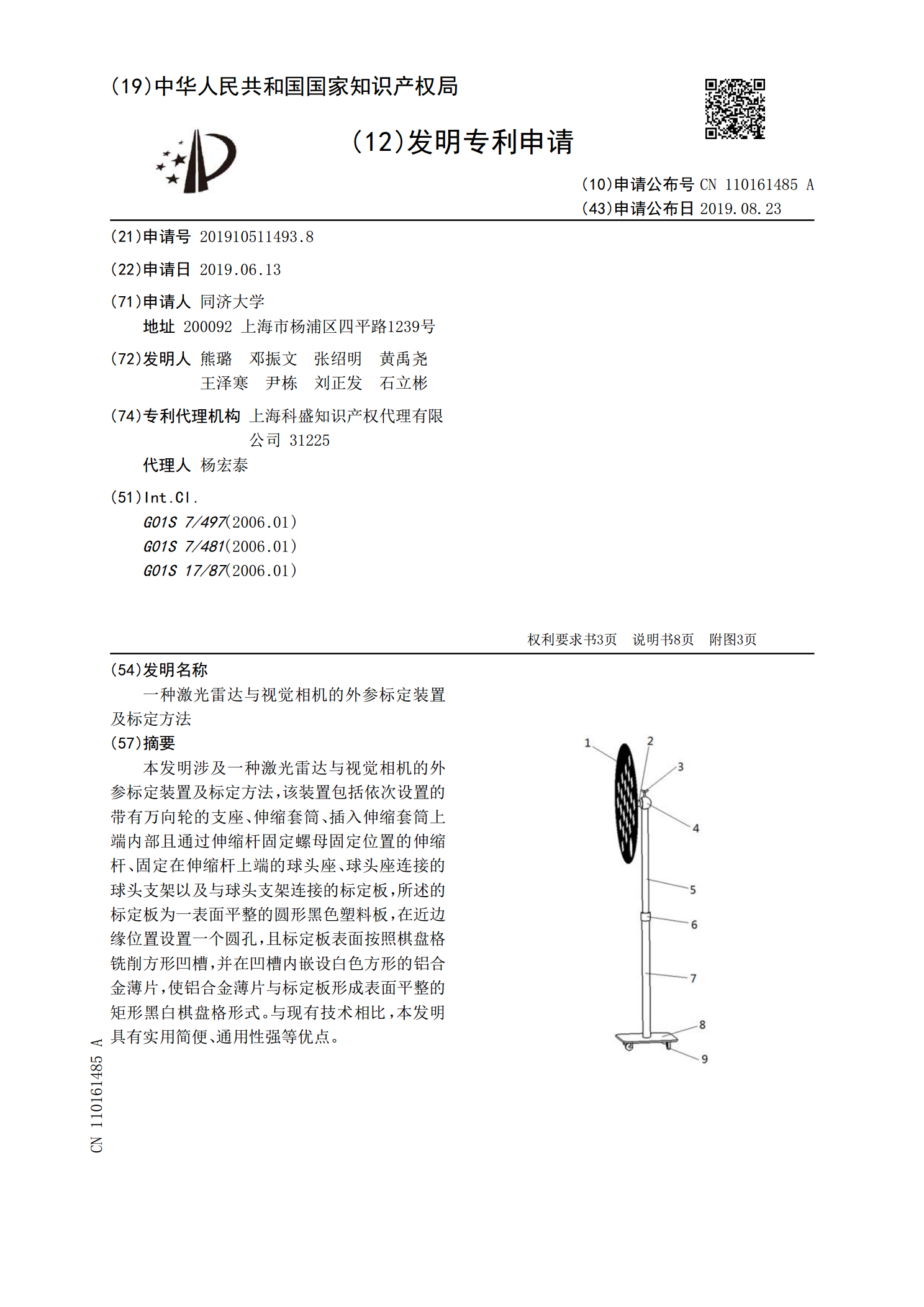
本发明涉及一种激光雷达与视觉相机的外参标定装置及标定方法,该装置包括依次设置的带有万向轮的支座、伸缩套筒、插入伸缩套筒上端内部且通过伸缩杆固定螺母固定位置的伸缩杆、固定在伸缩杆上端的球头座、球头座连接的球头支架以及与球头支架连接的标定板,所述的标定板为一表面平整的圆形黑色塑料板,在近边缘位置设置一个圆孔,且标定板表面按照棋盘格铣削方形凹槽,并在凹槽内嵌设白色方形的铝合金薄片,使铝合金薄片与标定板形成表面平整的矩形黑白棋盘格形式。与现有技术相比,本发明具有实用简便、通用性强等优点。
相机内参的标定验证方法、装置、设备及介质.pdf
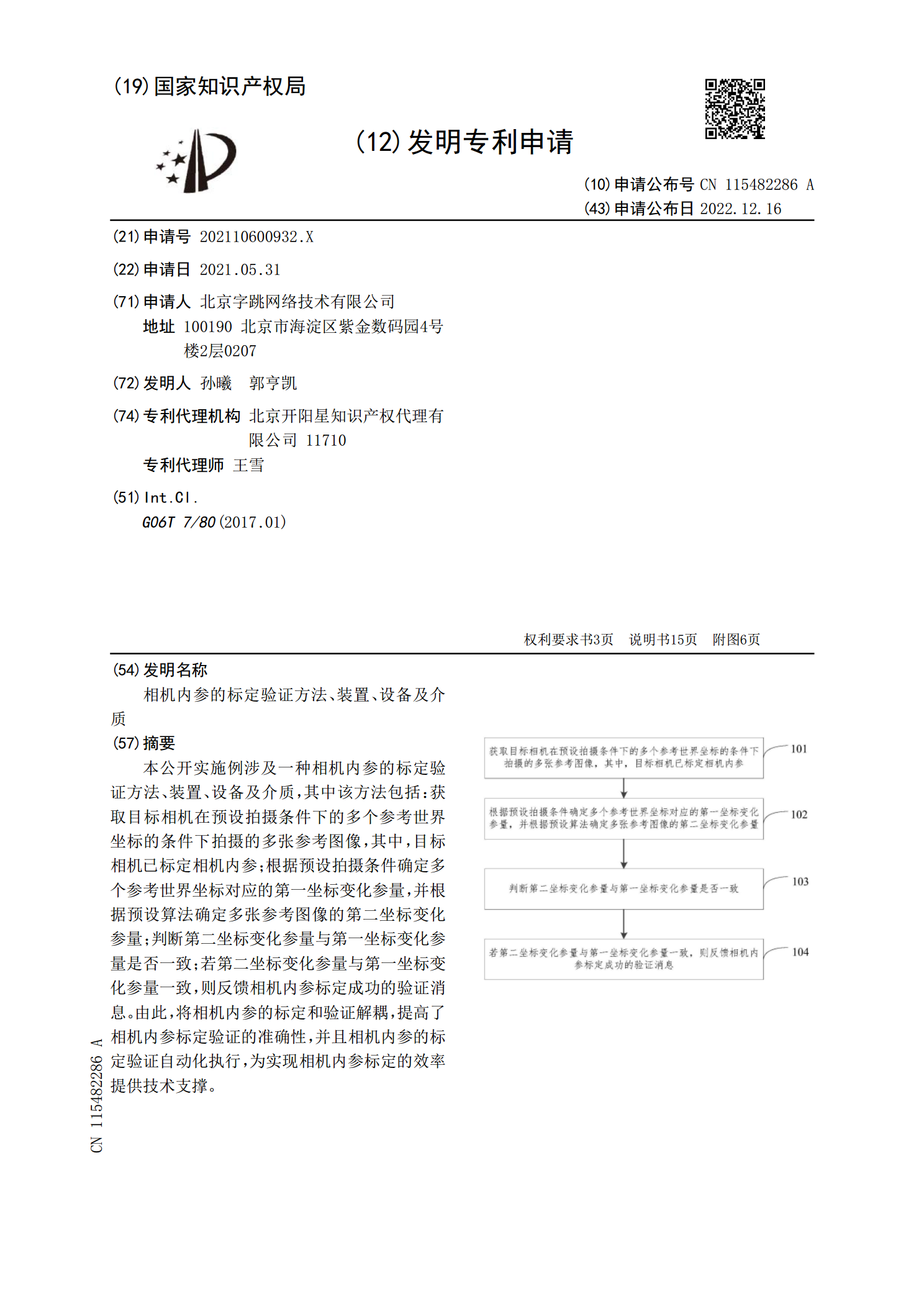
本公开实施例涉及一种相机内参的标定验证方法、装置、设备及介质,其中该方法包括:获取目标相机在预设拍摄条件下的多个参考世界坐标的条件下拍摄的多张参考图像,其中,目标相机已标定相机内参;根据预设拍摄条件确定多个参考世界坐标对应的第一坐标变化参量,并根据预设算法确定多张参考图像的第二坐标变化参量;判断第二坐标变化参量与第一坐标变化参量是否一致;若第二坐标变化参量与第一坐标变化参量一致,则反馈相机内参标定成功的验证消息。由此,将相机内参的标定和验证解耦,提高了相机内参标定验证的准确性,并且相机内参的标定验证自动化
一种激光雷达标定方法、装置、设备及存储介质.pdf
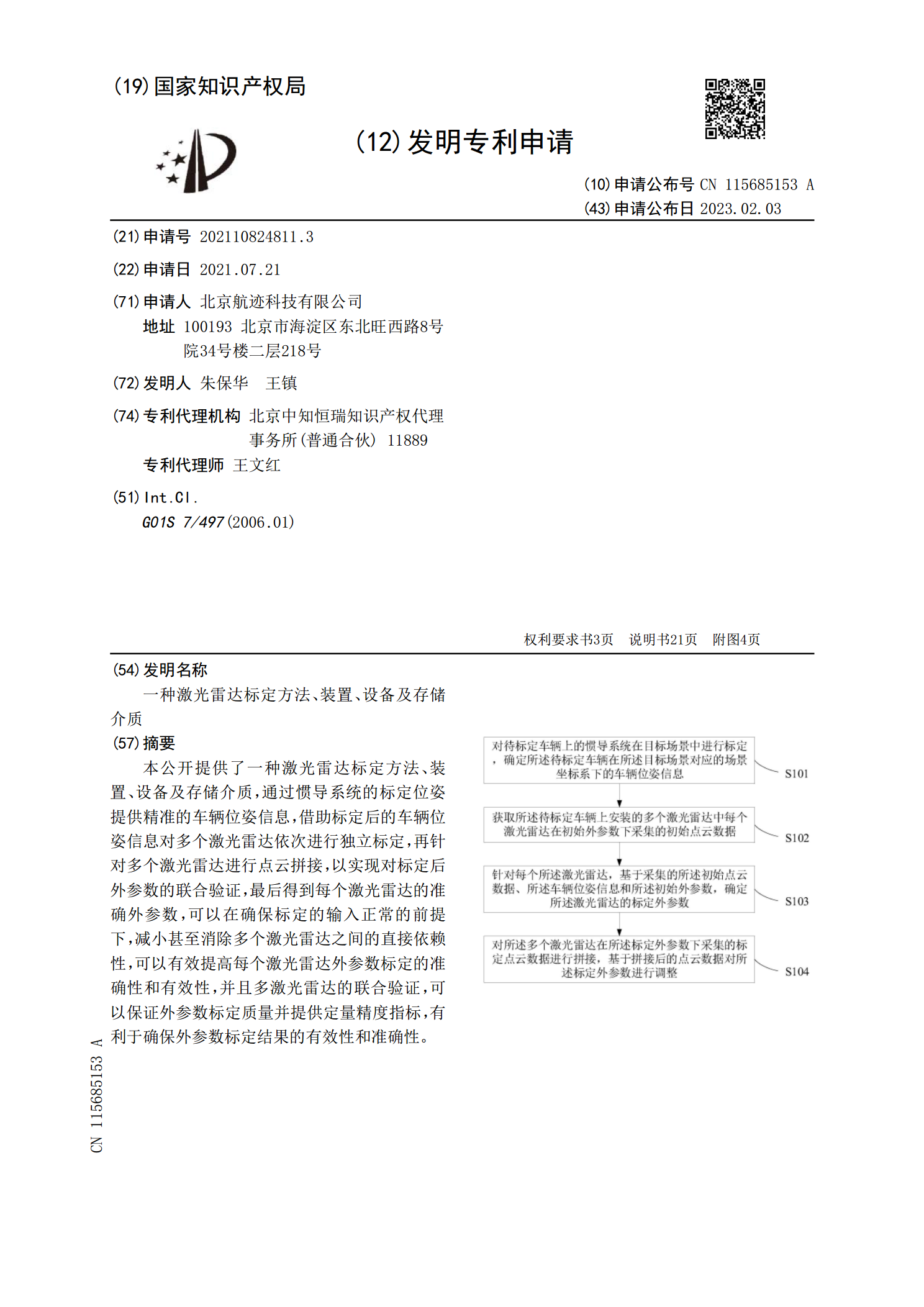
本公开提供了一种激光雷达标定方法、装置、设备及存储介质,通过惯导系统的标定位姿提供精准的车辆位姿信息,借助标定后的车辆位姿信息对多个激光雷达依次进行独立标定,再针对多个激光雷达进行点云拼接,以实现对标定后外参数的联合验证,最后得到每个激光雷达的准确外参数,可以在确保标定的输入正常的前提下,减小甚至消除多个激光雷达之间的直接依赖性,可以有效提高每个激光雷达外参数标定的准确性和有效性,并且多激光雷达的联合验证,可以保证外参数标定质量并提供定量精度指标,有利于确保外参数标定结果的有效性和准确性。