
一种激光雷达与视觉相机的外参标定装置及标定方法.pdf

努力****冰心


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光雷达与视觉相机的外参标定装置及标定方法.pdf
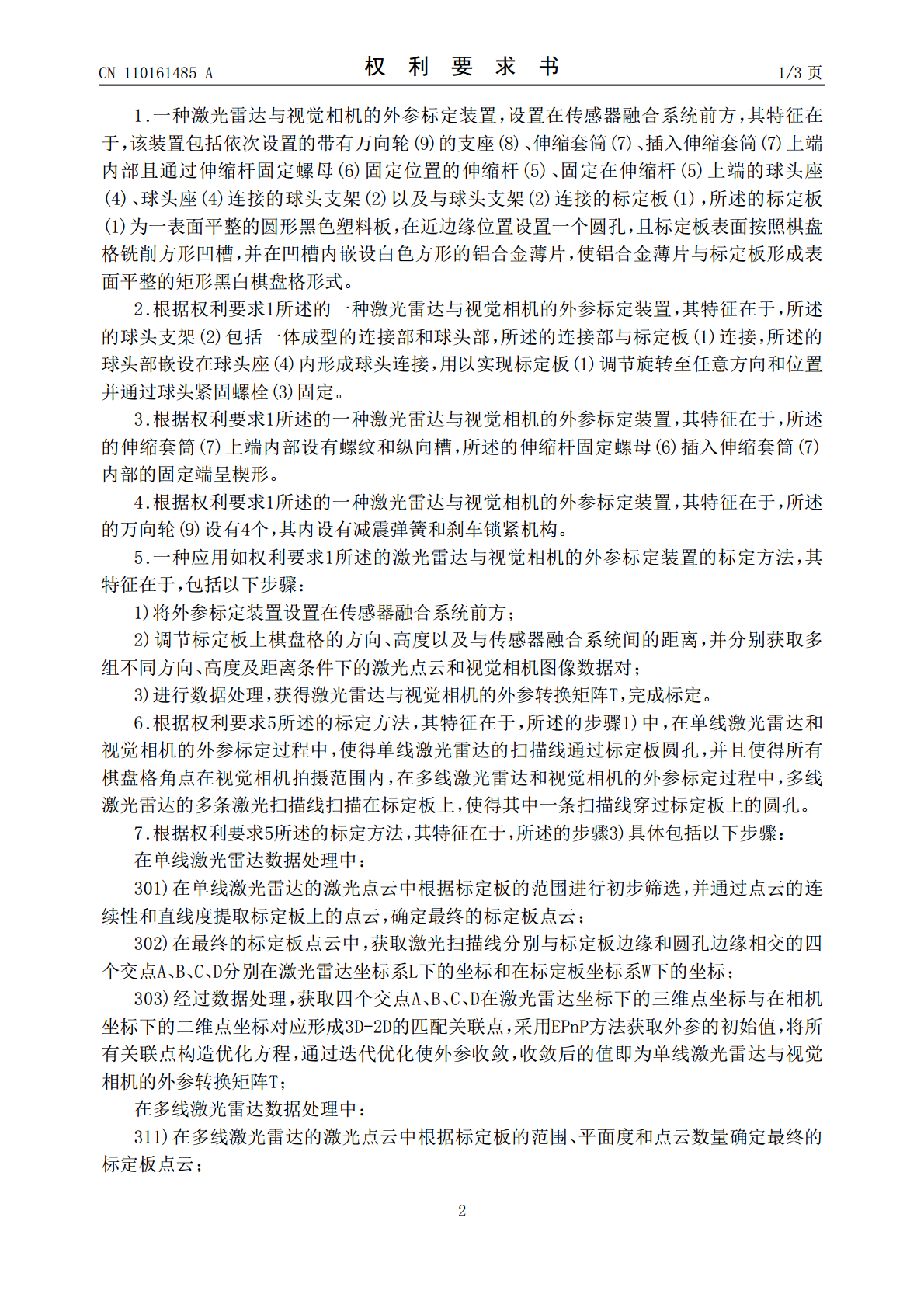
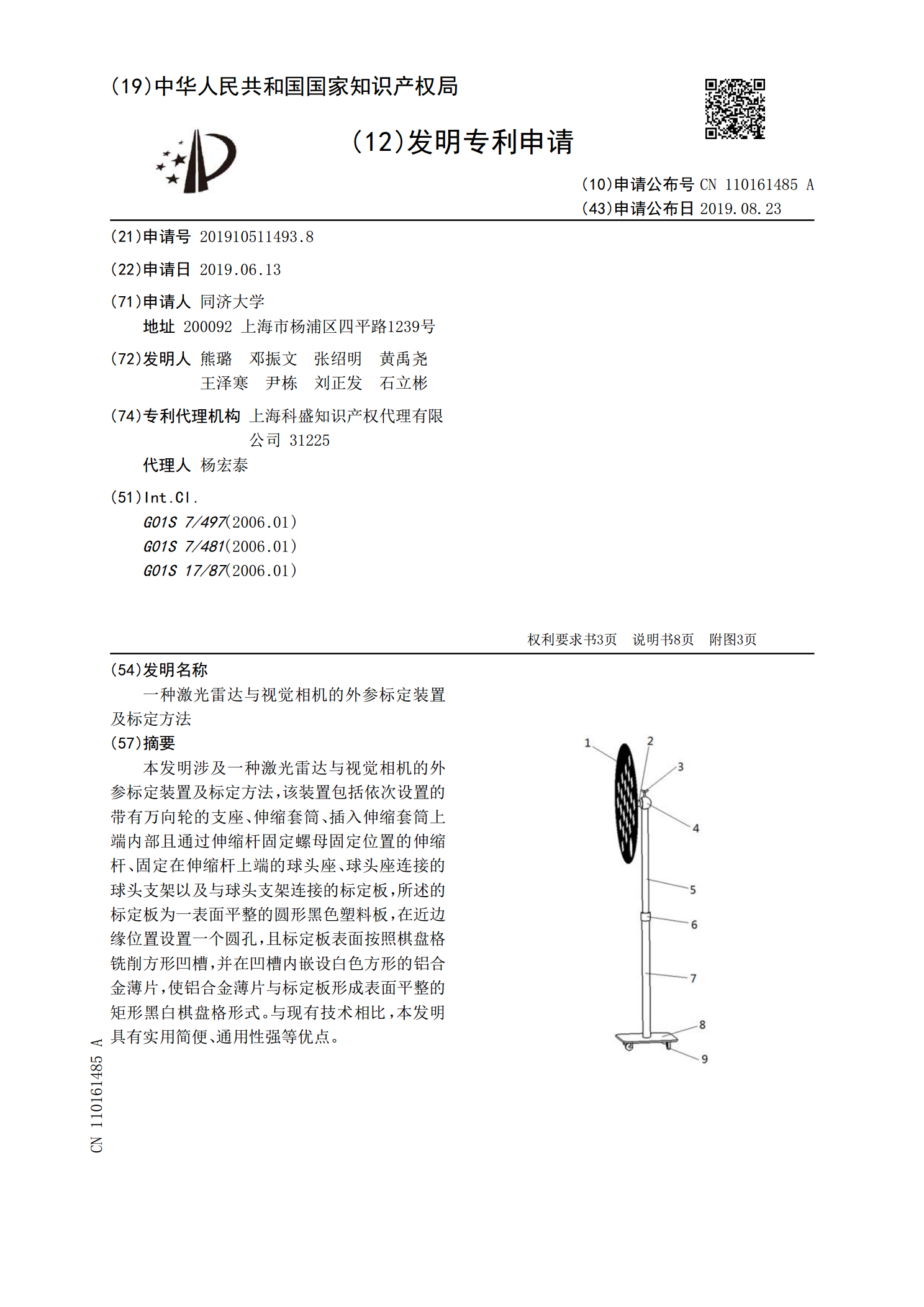
本发明涉及一种激光雷达与视觉相机的外参标定装置及标定方法,该装置包括依次设置的带有万向轮的支座、伸缩套筒、插入伸缩套筒上端内部且通过伸缩杆固定螺母固定位置的伸缩杆、固定在伸缩杆上端的球头座、球头座连接的球头支架以及与球头支架连接的标定板,所述的标定板为一表面平整的圆形黑色塑料板,在近边缘位置设置一个圆孔,且标定板表面按照棋盘格铣削方形凹槽,并在凹槽内嵌设白色方形的铝合金薄片,使铝合金薄片与标定板形成表面平整的矩形黑白棋盘格形式。与现有技术相比,本发明具有实用简便、通用性强等优点。
相机外参标定方法、系统及装置.pdf
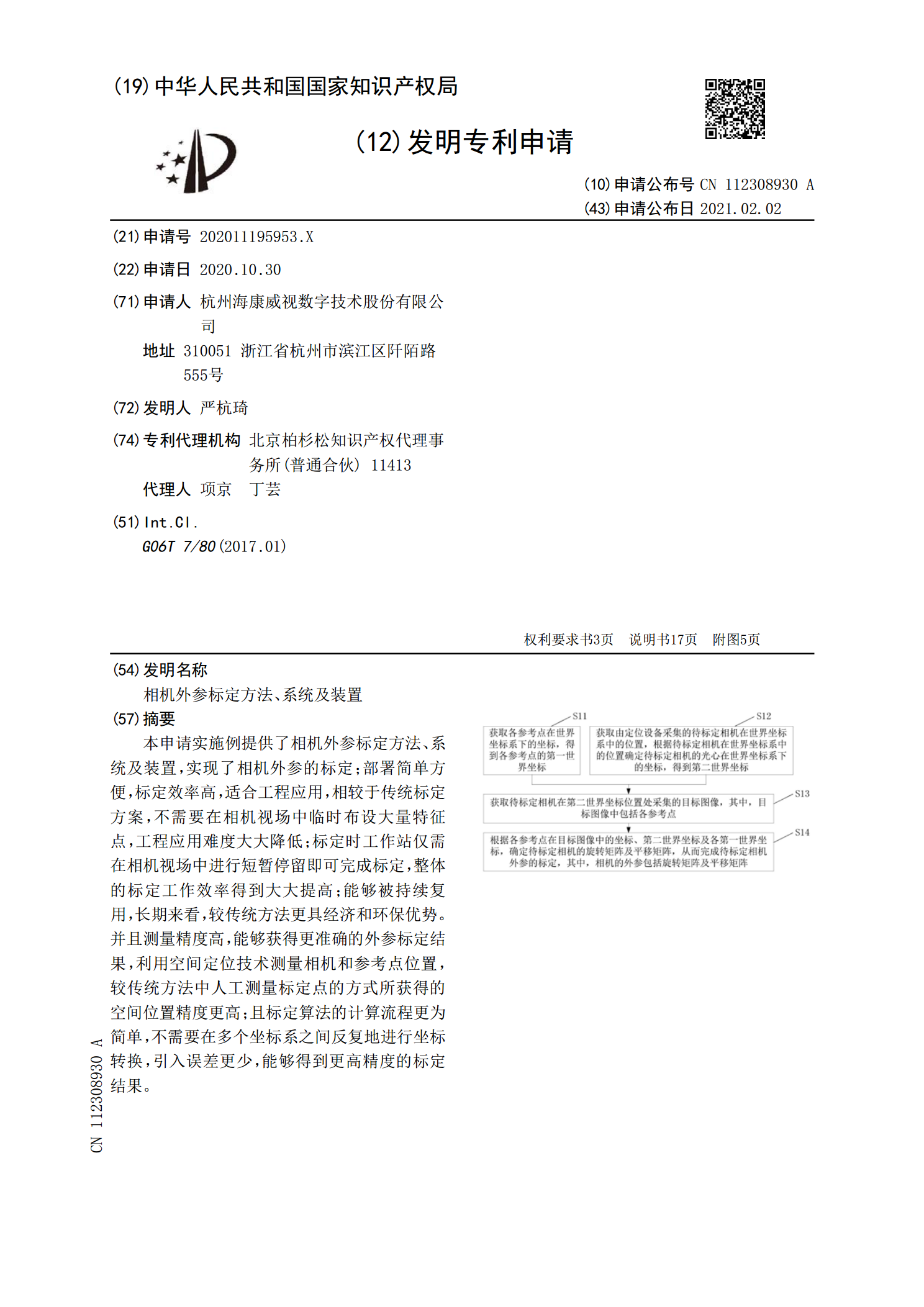
本申请实施例提供了相机外参标定方法、系统及装置,实现了相机外参的标定;部署简单方便,标定效率高,适合工程应用,相较于传统标定方案,不需要在相机视场中临时布设大量特征点,工程应用难度大大降低;标定时工作站仅需在相机视场中进行短暂停留即可完成标定,整体的标定工作效率得到大大提高;能够被持续复用,长期来看,较传统方法更具经济和环保优势。并且测量精度高,能够获得更准确的外参标定结果,利用空间定位技术测量相机和参考点位置,较传统方法中人工测量标定点的方式所获得的空间位置精度更高;且标定算法的计算流程更为简单,不需要
激光雷达与相机联合外参标定系统及方法.pdf
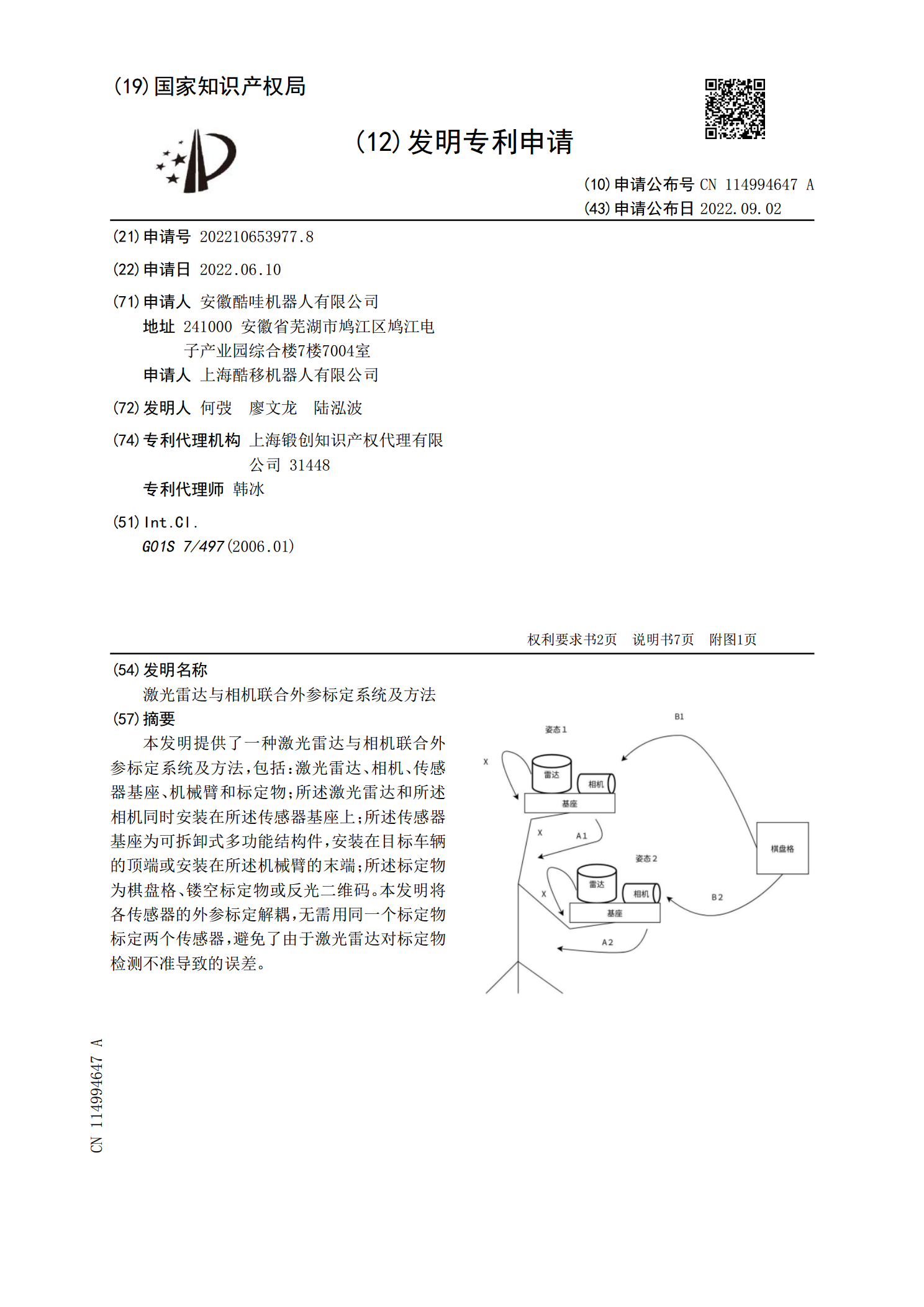
本发明提供了一种激光雷达与相机联合外参标定系统及方法,包括:激光雷达、相机、传感器基座、机械臂和标定物;所述激光雷达和所述相机同时安装在所述传感器基座上;所述传感器基座为可拆卸式多功能结构件,安装在目标车辆的顶端或安装在所述机械臂的末端;所述标定物为棋盘格、镂空标定物或反光二维码。本发明将各传感器的外参标定解耦,无需用同一个标定物标定两个传感器,避免了由于激光雷达对标定物检测不准导致的误差。

双目相机外参标定方法和装置.pdf
本说明书涉及自动驾驶技术领域,具体地公开了一种双目相机外参标定方法和装置,其中,该方法包括:获取多帧第一图像和多帧第二图像,第一图像为车辆在沿平坦直线车道行驶时左目摄像头拍摄到的多帧图像,第二图像为车辆在沿平坦直线车道行驶时右目摄像头拍摄的多帧图像;提取多帧第一图像中各帧第一图像中的多个第一静态特征,提取多帧第二图像中各帧第二图像中的多个第二静态特征;将多个第一静态特征与多个第二静态特征进行匹配,得到多个静态特征对;根据历史校准文件、左目摄像头与右目摄像头之间的距离以及多个静态特征对,确定左目摄像头与右目

固态激光雷达与相机间外参标定方法研究.docx
固态激光雷达与相机间外参标定方法研究摘要:随着无人驾驶技术的发展,固态激光雷达以及相机成为无人驾驶系统中必不可少的传感器。同时,在使用这些传感器进行目标检测以及环境建模时,常常涉及到它们之间的外部参数标定问题。本文介绍了一种固态激光雷达与相机间外参标定的方法。该方法基于三角测量,通过基本矩阵计算出相机与激光雷达之间的外部参数。实验结果表明,该方法能够快速准确地完成固态激光雷达与相机间外部参数标定任务。关键词:固态激光雷达;相机;外参标定;基本矩阵;三角测量引言:固态激光雷达以及相机是现代无人驾驶技术中最常