
一种激光雷达标定方法、装置、设备及存储介质.pdf

闪闪****魔王

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光雷达标定方法、装置、设备及存储介质.pdf
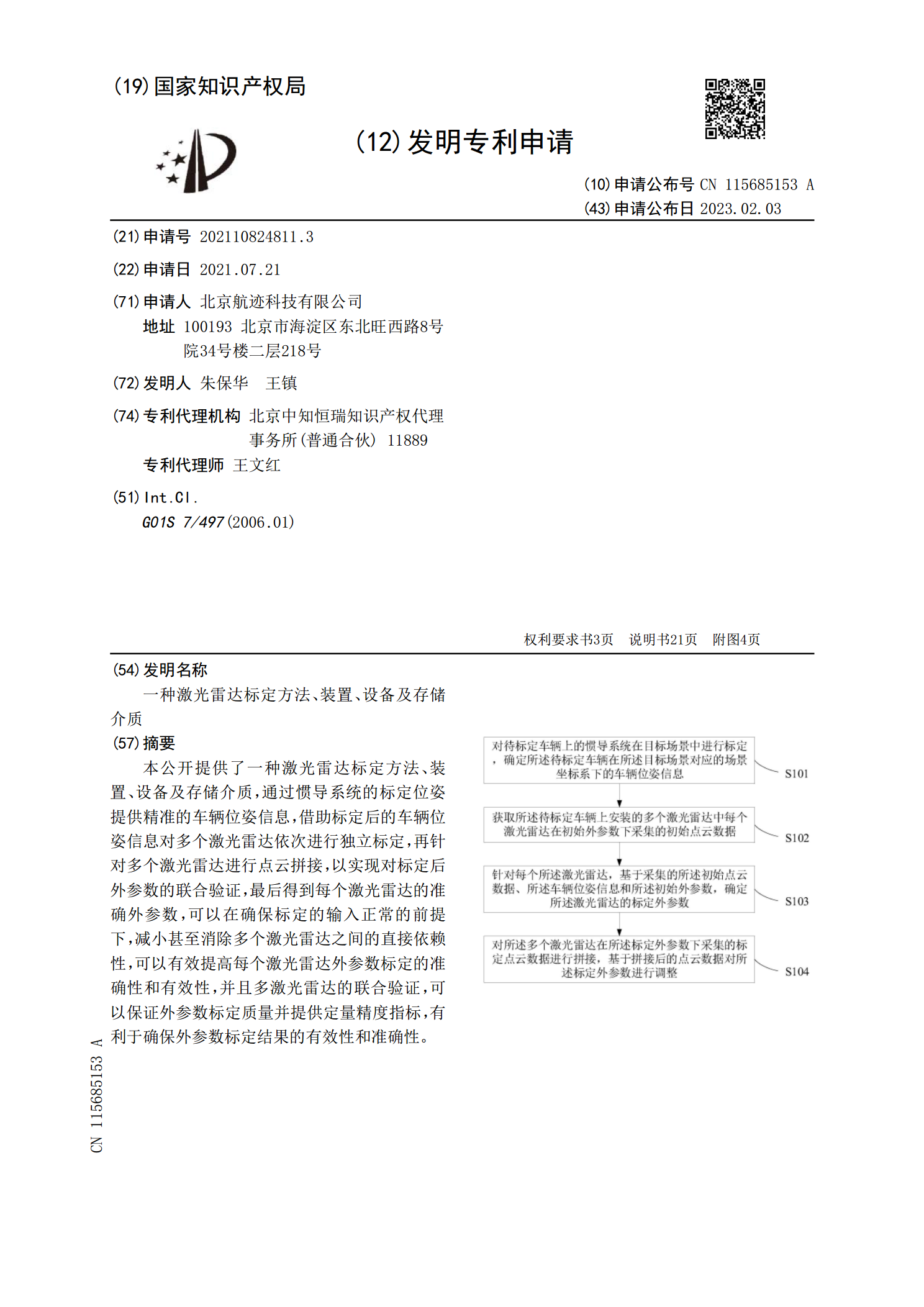
本公开提供了一种激光雷达标定方法、装置、设备及存储介质,通过惯导系统的标定位姿提供精准的车辆位姿信息,借助标定后的车辆位姿信息对多个激光雷达依次进行独立标定,再针对多个激光雷达进行点云拼接,以实现对标定后外参数的联合验证,最后得到每个激光雷达的准确外参数,可以在确保标定的输入正常的前提下,减小甚至消除多个激光雷达之间的直接依赖性,可以有效提高每个激光雷达外参数标定的准确性和有效性,并且多激光雷达的联合验证,可以保证外参数标定质量并提供定量精度指标,有利于确保外参数标定结果的有效性和准确性。
一种激光雷达的标定方法、装置及存储介质.pdf
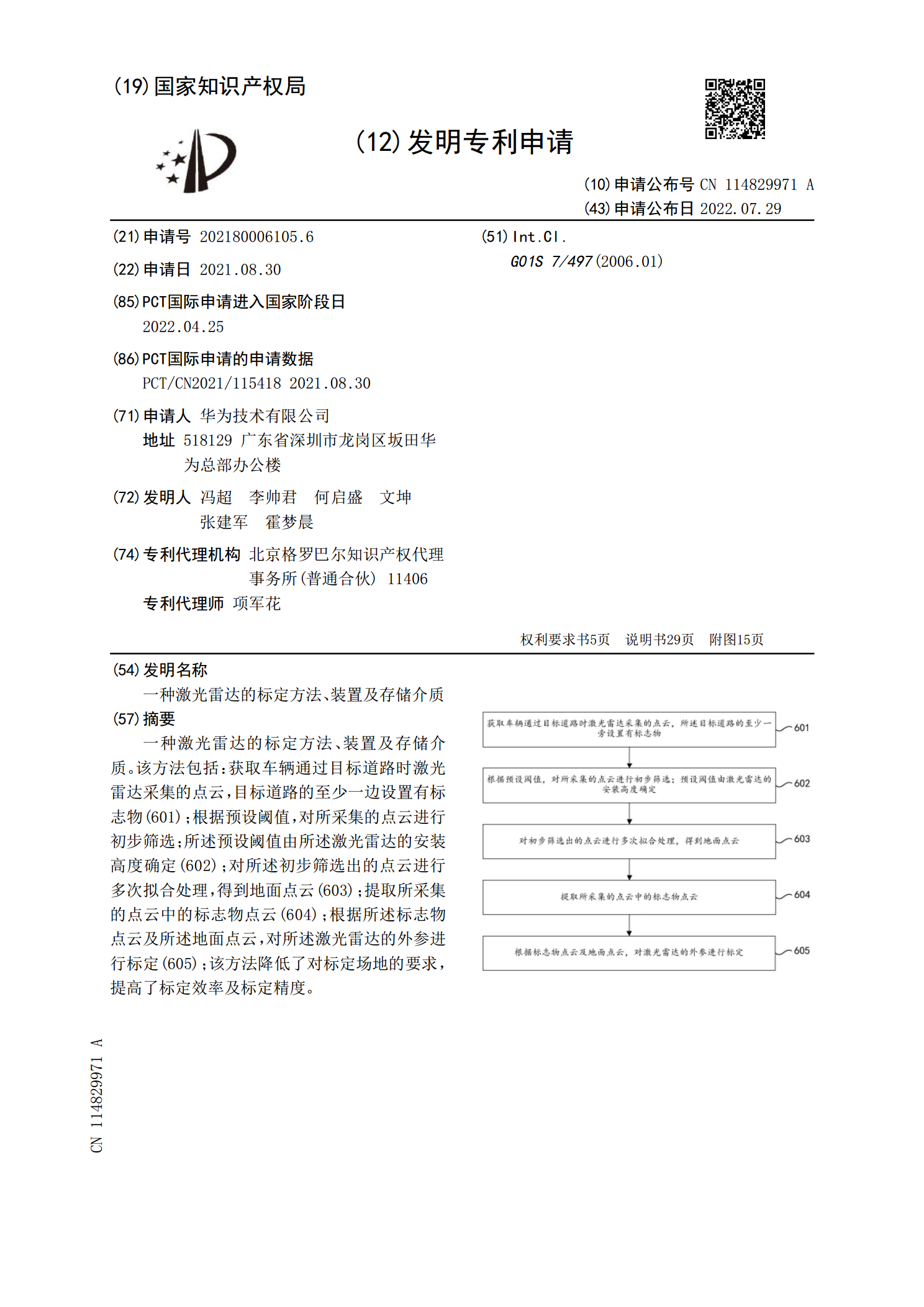
一种激光雷达的标定方法、装置及存储介质。该方法包括:获取车辆通过目标道路时激光雷达采集的点云,目标道路的至少一边设置有标志物(601);根据预设阈值,对所采集的点云进行初步筛选;所述预设阈值由所述激光雷达的安装高度确定(602);对所述初步筛选出的点云进行多次拟合处理,得到地面点云(603);提取所采集的点云中的标志物点云(604);根据所述标志物点云及所述地面点云,对所述激光雷达的外参进行标定(605);该方法降低了对标定场地的要求,提高了标定效率及标定精度。
一种激光雷达外参标定方法、装置、设备及存储介质.pdf
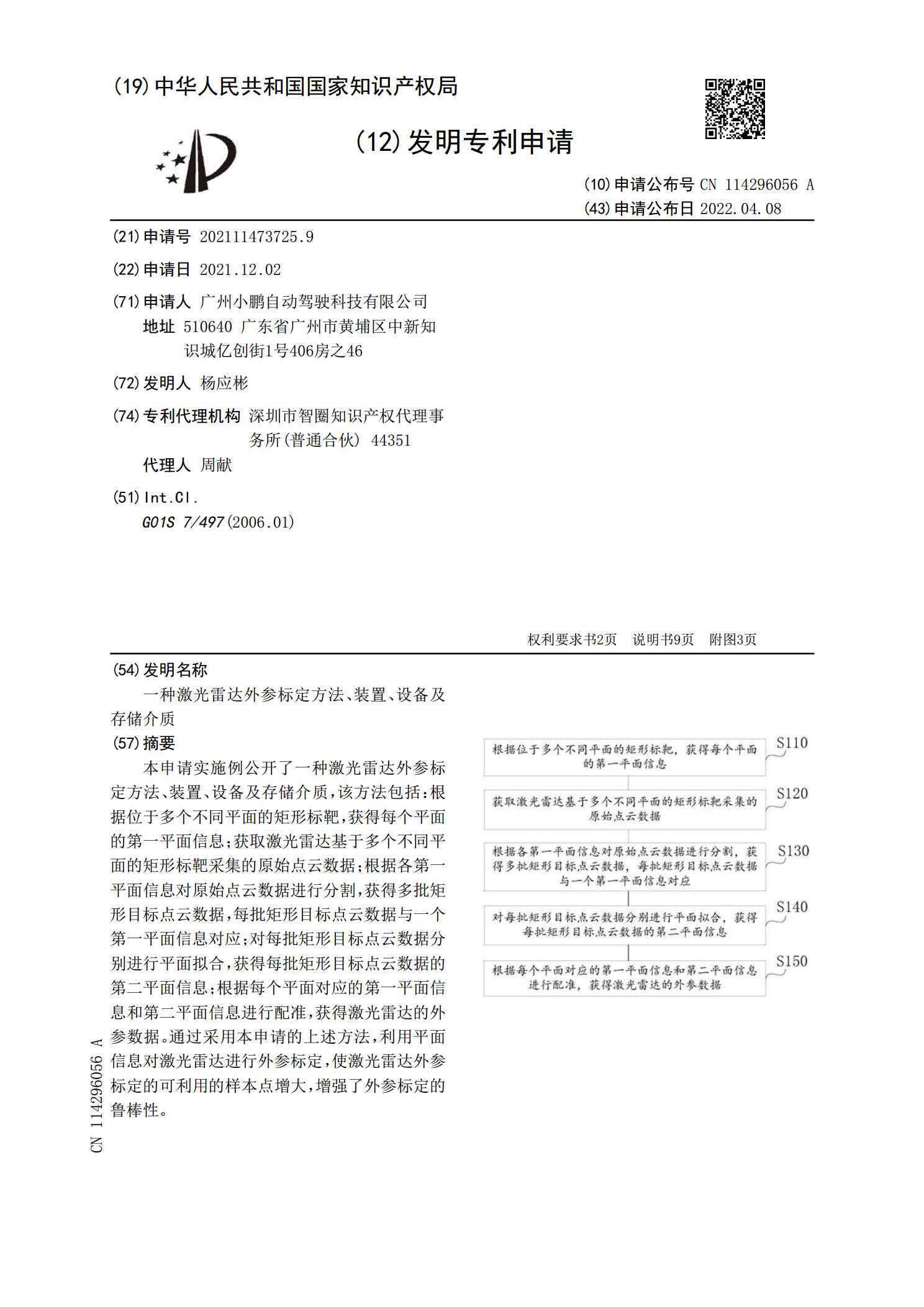
本申请实施例公开了一种激光雷达外参标定方法、装置、设备及存储介质,该方法包括:根据位于多个不同平面的矩形标靶,获得每个平面的第一平面信息;获取激光雷达基于多个不同平面的矩形标靶采集的原始点云数据;根据各第一平面信息对原始点云数据进行分割,获得多批矩形目标点云数据,每批矩形目标点云数据与一个第一平面信息对应;对每批矩形目标点云数据分别进行平面拟合,获得每批矩形目标点云数据的第二平面信息;根据每个平面对应的第一平面信息和第二平面信息进行配准,获得激光雷达的外参数据。通过采用本申请的上述方法,利用平面信息对激光
一种多激光雷达外参标定方法、装置、设备及存储介质.pdf
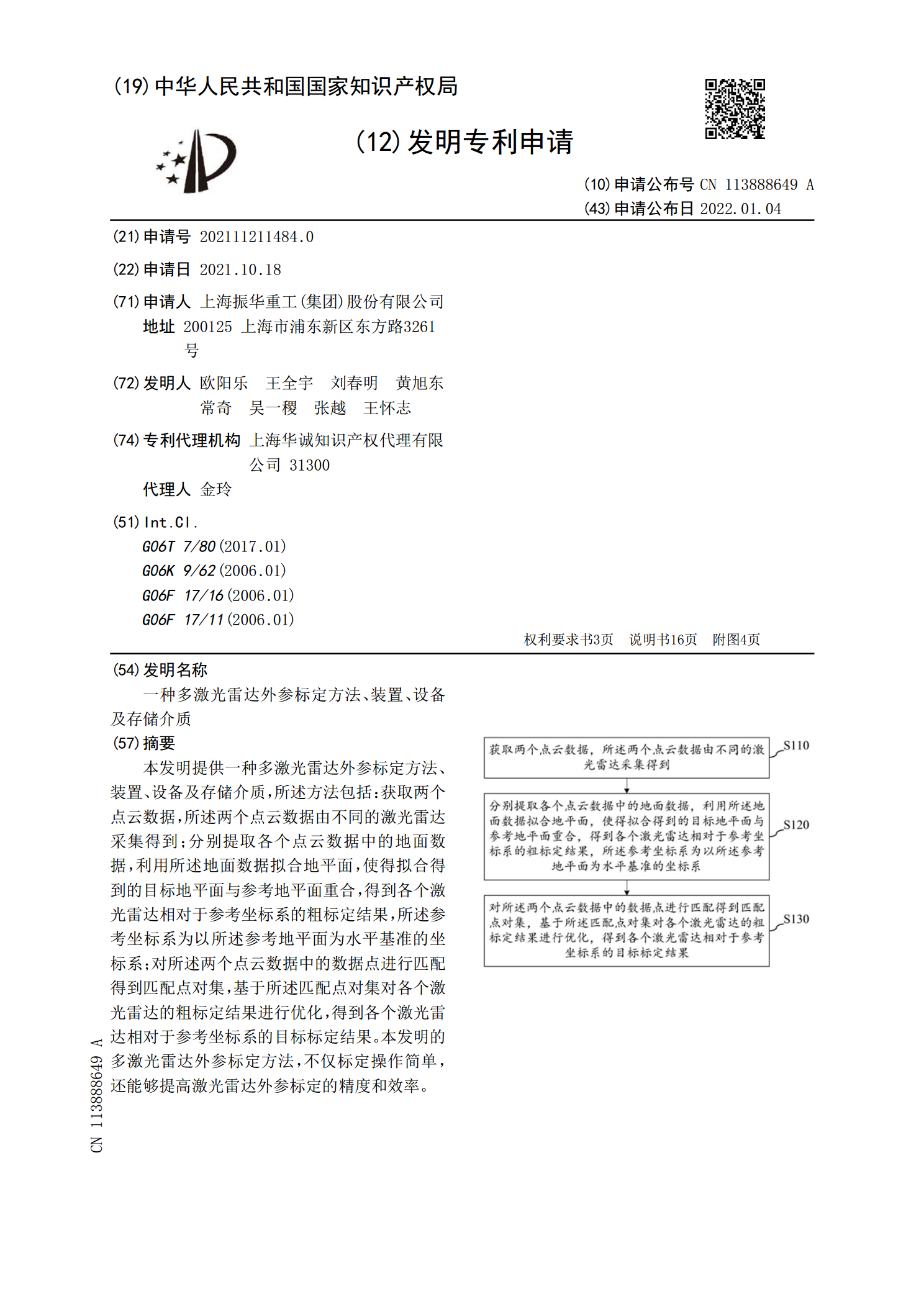
本发明提供一种多激光雷达外参标定方法、装置、设备及存储介质,所述方法包括:获取两个点云数据,所述两个点云数据由不同的激光雷达采集得到;分别提取各个点云数据中的地面数据,利用所述地面数据拟合地平面,使得拟合得到的目标地平面与参考地平面重合,得到各个激光雷达相对于参考坐标系的粗标定结果,所述参考坐标系为以所述参考地平面为水平基准的坐标系;对所述两个点云数据中的数据点进行匹配得到匹配点对集,基于所述匹配点对集对各个激光雷达的粗标定结果进行优化,得到各个激光雷达相对于参考坐标系的目标标定结果。本发明的多激光雷达外
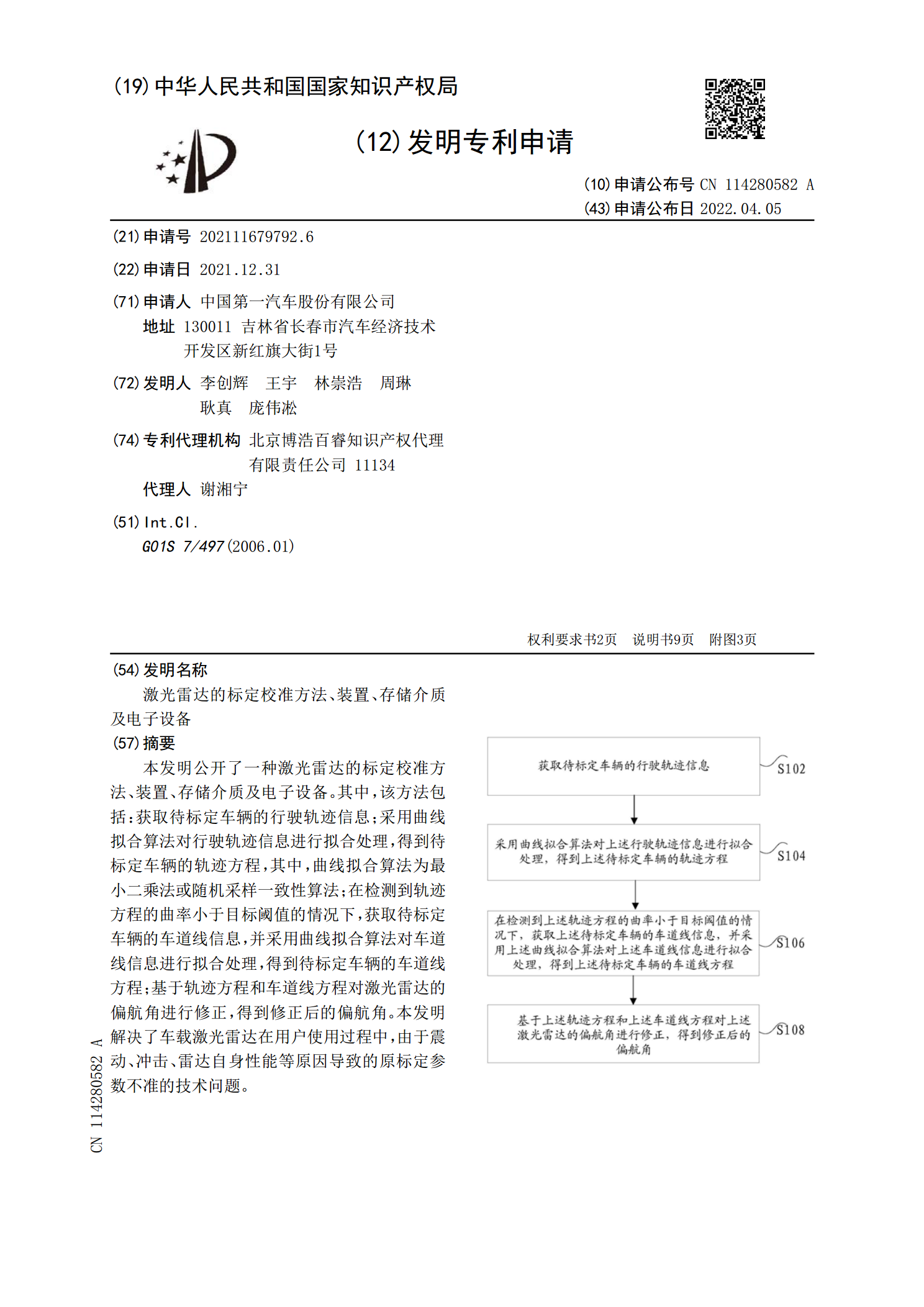
激光雷达的标定校准方法、装置、存储介质及电子设备.pdf
本发明公开了一种激光雷达的标定校准方法、装置、存储介质及电子设备。其中,该方法包括:获取待标定车辆的行驶轨迹信息;采用曲线拟合算法对行驶轨迹信息进行拟合处理,得到待标定车辆的轨迹方程,其中,曲线拟合算法为最小二乘法或随机采样一致性算法;在检测到轨迹方程的曲率小于目标阈值的情况下,获取待标定车辆的车道线信息,并采用曲线拟合算法对车道线信息进行拟合处理,得到待标定车辆的车道线方程;基于轨迹方程和车道线方程对激光雷达的偏航角进行修正,得到修正后的偏航角。本发明解决了车载激光雷达在用户使用过程中,由于震动、冲击、