
一种搬运机器人的控制方法、装置以及快捷分拣搬运系统.pdf

努力****恨风


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种搬运机器人的控制方法、装置以及快捷分拣搬运系统.pdf
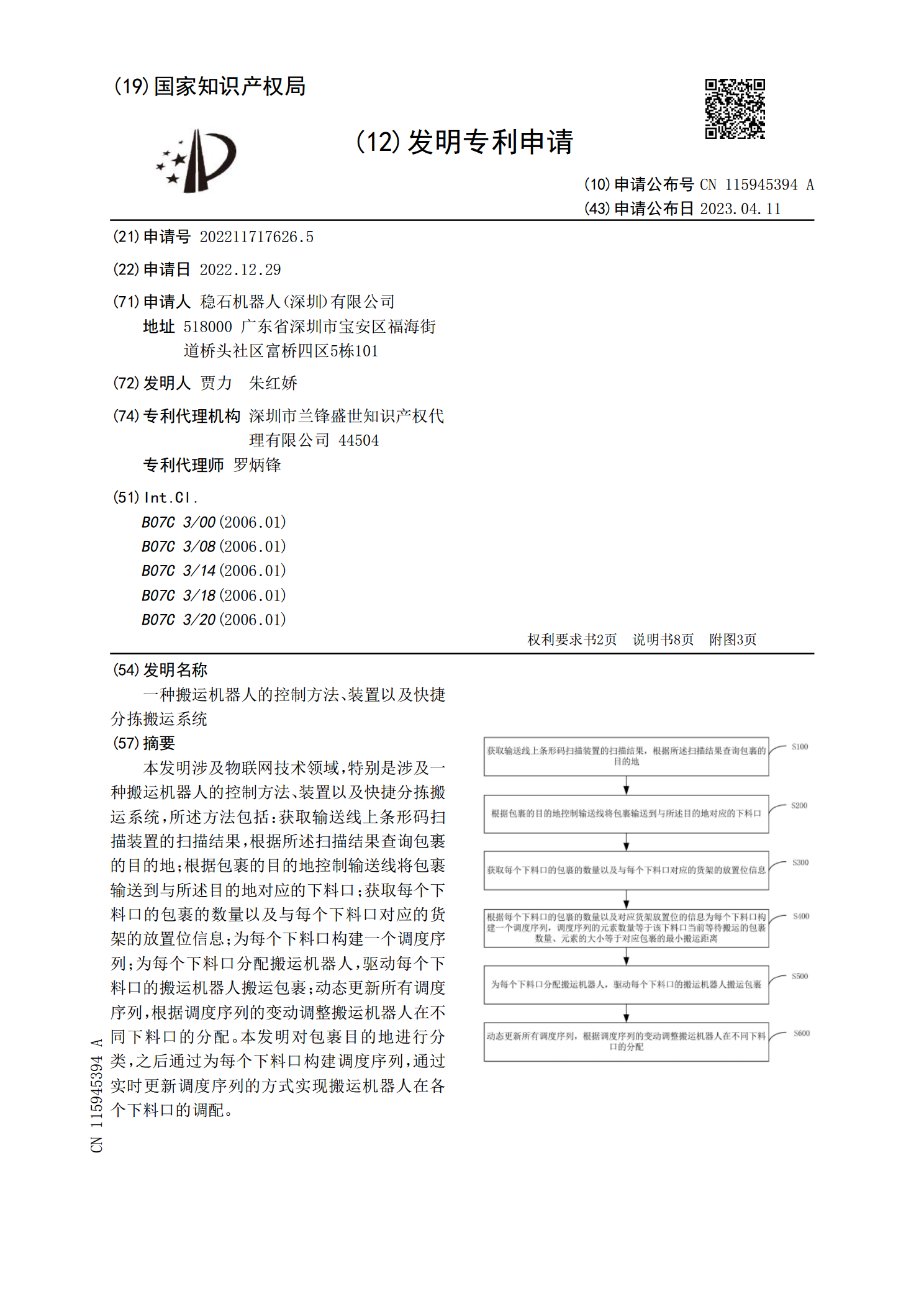
本发明涉及物联网技术领域,特别是涉及一种搬运机器人的控制方法、装置以及快捷分拣搬运系统,所述方法包括:获取输送线上条形码扫描装置的扫描结果,根据所述扫描结果查询包裹的目的地;根据包裹的目的地控制输送线将包裹输送到与所述目的地对应的下料口;获取每个下料口的包裹的数量以及与每个下料口对应的货架的放置位信息;为每个下料口构建一个调度序列;为每个下料口分配搬运机器人,驱动每个下料口的搬运机器人搬运包裹;动态更新所有调度序列,根据调度序列的变动调整搬运机器人在不同下料口的分配。本发明对包裹目的地进行分类,之后通过为
一种搬运分拣机器人控制装置.pdf
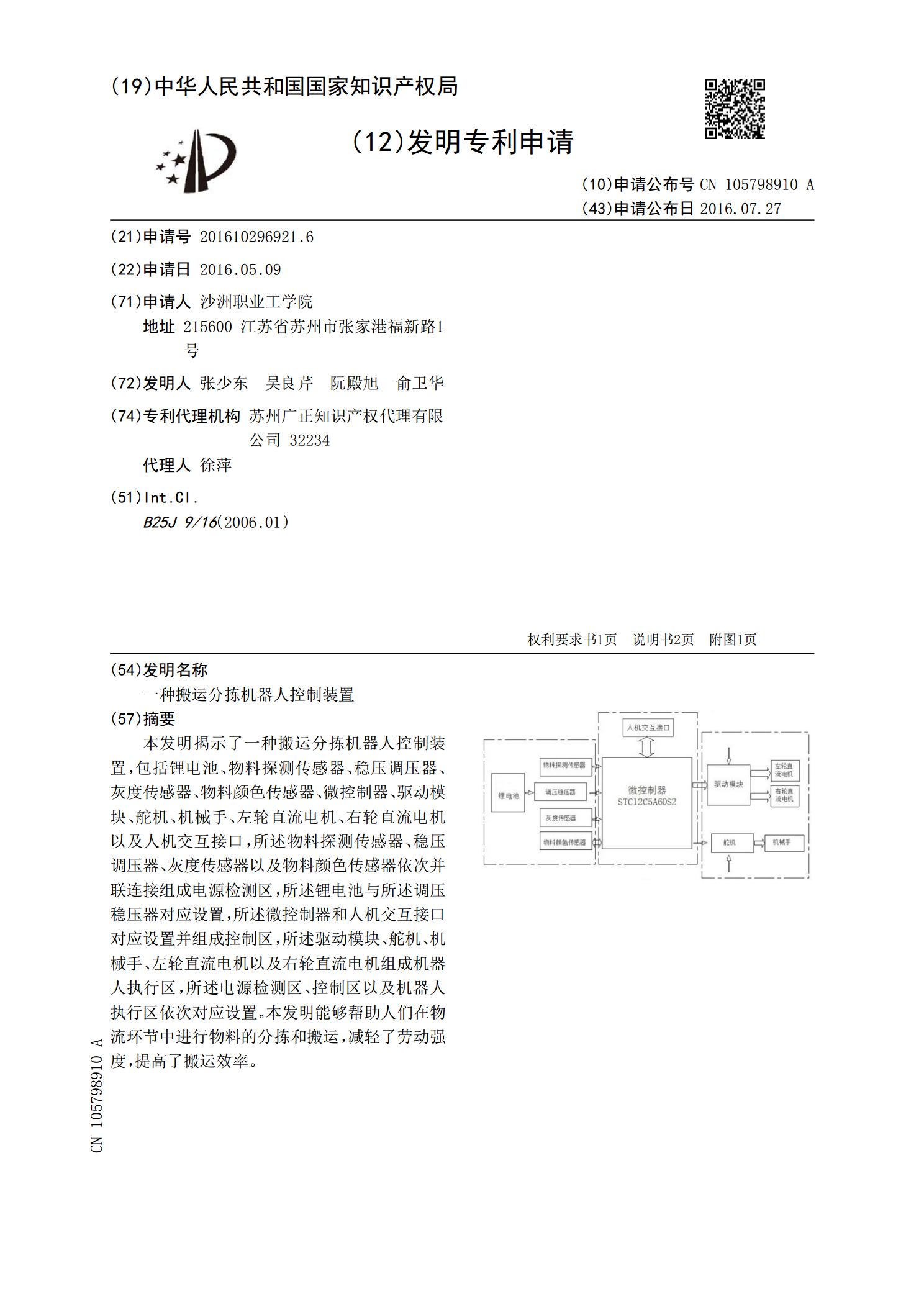
本发明揭示了一种搬运分拣机器人控制装置,包括锂电池、物料探测传感器、稳压调压器、灰度传感器、物料颜色传感器、微控制器、驱动模块、舵机、机械手、左轮直流电机、右轮直流电机以及人机交互接口,所述物料探测传感器、稳压调压器、灰度传感器以及物料颜色传感器依次并联连接组成电源检测区,所述锂电池与所述调压稳压器对应设置,所述微控制器和人机交互接口对应设置并组成控制区,所述驱动模块、舵机、机械手、左轮直流电机以及右轮直流电机组成机器人执行区,所述电源检测区、控制区以及机器人执行区依次对应设置。本发明能够帮助人们在物流环

搬运装置、搬运方法以及部件组装系统.pdf
在搬运装置中,若从上方观察时的尺寸变大,则有可能需要用于放置搬运装置的宽广的空间、或者搬运装置难以在宽度较窄的通路上行驶。搬运装置(1)具备至少一个驱动轮单元(3)。至少一个驱动轮单元(3)所包括的驱动轮单元(3)具有行驶机构(4)和转向机构(5)。行驶机构(4)包括驱动轮(40)。转向机构(5)变更驱动轮(40)的朝向。转向机构(5)位于行驶机构(4)的上方。在利用搬运装置(1)搬运搬运物(71)的状态下,驱动轮(40)从上方观察时位于搬运物(71)的周围。
货物搬运方法、装置、服务器以及搬运机器人.pdf
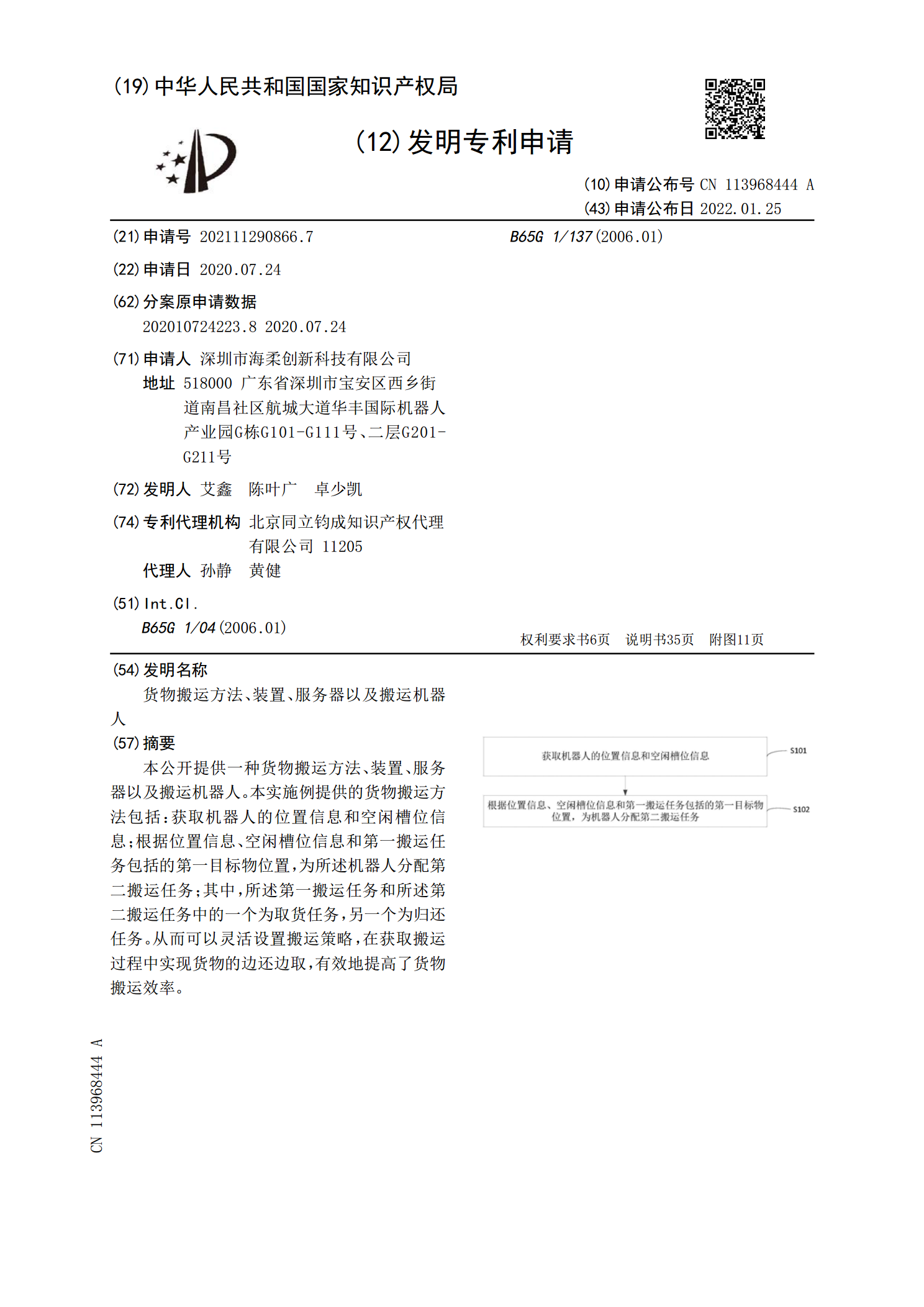
本公开提供一种货物搬运方法、装置、服务器以及搬运机器人。本实施例提供的货物搬运方法包括:获取机器人的位置信息和空闲槽位信息;根据位置信息、空闲槽位信息和第一搬运任务包括的第一目标物位置,为所述机器人分配第二搬运任务;其中,所述第一搬运任务和所述第二搬运任务中的一个为取货任务,另一个为归还任务。从而可以灵活设置搬运策略,在获取搬运过程中实现货物的边还边取,有效地提高了货物搬运效率。

工件搬运装置以及搬运方法.pdf
本发明提供能够防止被搬运的工件发生蠕动、并且能够容易进行工件向升降器的转移的工件搬运装置以及搬运方法。本发明的工件搬运装置具备:以悬臂构造安装有多个工件搬运用的驱动辊(4)的左右的辊架(2);相互独立地安装于各个辊架(2)的减速马达(7);通过各减速马达(7)并经由具有各自的驱动辊(4)的链轮(5)来驱动各辊的设置于各辊架(2)的滚子链(6)。另外,通过驱动器能够将左右的辊架(2)以将各辊架(2)支承为能够旋转的旋转轴(9)为中心进行开闭。