
一种具有轻质腿特性的足式机器人.pdf

一吃****春晓


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具有轻质腿特性的足式机器人.pdf
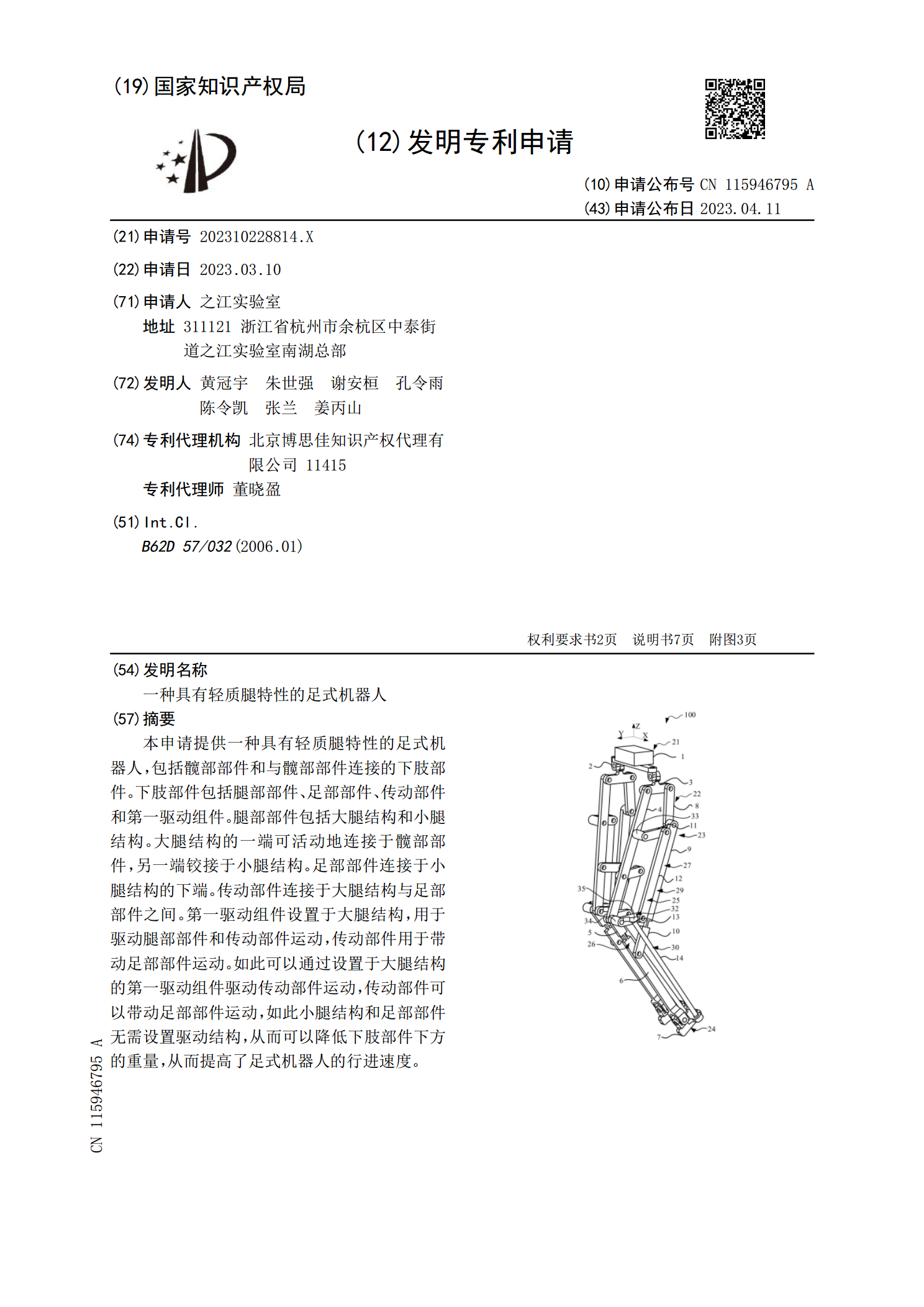
本申请提供一种具有轻质腿特性的足式机器人,包括髋部部件和与髋部部件连接的下肢部件。下肢部件包括腿部部件、足部部件、传动部件和第一驱动组件。腿部部件包括大腿结构和小腿结构。大腿结构的一端可活动地连接于髋部部件,另一端铰接于小腿结构。足部部件连接于小腿结构的下端。传动部件连接于大腿结构与足部部件之间。第一驱动组件设置于大腿结构,用于驱动腿部部件和传动部件运动,传动部件用于带动足部部件运动。如此可以通过设置于大腿结构的第一驱动组件驱动传动部件运动,传动部件可以带动足部部件运动,如此小腿结构和足部部件无需设置驱动

一种具有悬挂系统的轮腿式六足机器人.pdf
本发明公开一种具有悬挂系统的轮腿式六足机器人,包括机体与六条单腿结构;六条单腿机构在机体周向上均布。单腿结构具有跟关节、髋关节与膝关节;其中,跟关节与机体间相连,通过电机驱动绕竖直Z轴转动;髋关节与跟关节间通过悬挂系统相连,该悬挂系统仅仅使用一个避震器就可以实现两个方向的减震缓冲效果。髋关节与膝关节均通过电机直驱,绕水平Y轴转动,两者间通过大腿结构相连;膝关节与小腿结构末端相连,小腿结构末端还安装有轮式移动机构;小腿前端安装有足端缓冲机构。本发明具有悬挂系统的轮腿式六足机器人,可以保证机体内部环境在运动过

一种足式机器人的腿足弹性装置.pdf
本发明公开了一种足式机器人的腿足弹性装置,包括第一足板和第二足板,所述第一足板顶部的中心处固定连接有连接杆的下端,且第一足板的内部开设有内腔,并且内腔的内部放置有活动板,所述内腔的底部预留有通槽,且通槽的内部贯穿有连接板,并且连接板的顶部固定连接于活动板底部的中心处,所述连接板的底部固定连接有第二足板,且第二足板的底部设置有橡胶防滑块;本发明通过设置有第一弹簧、减震橡胶、第二弹簧和第三弹簧,保证了机器人在行走时,具有四重缓冲的效果,从而对机器人内部的精密零件起到了良好的保护作用,延长了机器人的使用寿命。
腿足式机器人.pdf
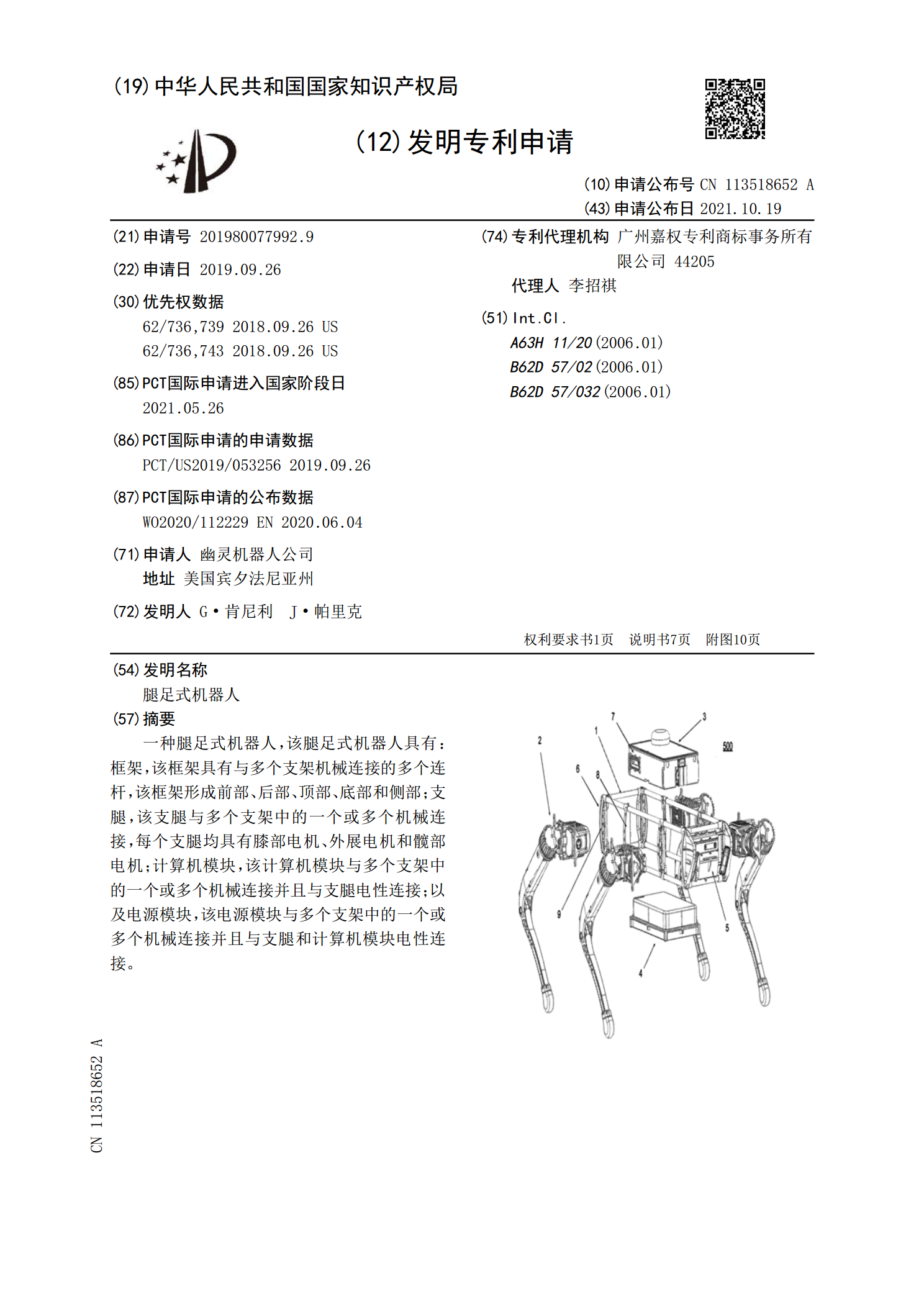
一种腿足式机器人,该腿足式机器人具有:框架,该框架具有与多个支架机械连接的多个连杆,该框架形成前部、后部、顶部、底部和侧部;支腿,该支腿与多个支架中的一个或多个机械连接,每个支腿均具有膝部电机、外展电机和髋部电机;计算机模块,该计算机模块与多个支架中的一个或多个机械连接并且与支腿电性连接;以及电源模块,该电源模块与多个支架中的一个或多个机械连接并且与支腿和计算机模块电性连接。

一种足式机器人驱动腿机构.pdf
本发明提供一种足式机器人驱动腿机构,属于足式机器人技术领域。该驱动腿机构包括腿支架、大腿骨、大腿前摆缸、大腿前拉索、大腿前滑轮、小腿前滑轮、小腿前拉索、小腿前摆缸、关节垫、小腿骨、球形足、小腿后拉索、小腿后摆缸、小腿后滑轮、大腿后滑轮、大腿后拉索、大腿后摆缸、膝关节柱、髋关节柱;腿支架与髋关节柱铰接组成髋关节,大腿骨上端与髋关节柱固连,关节垫位于大腿骨的下端并与膝关节柱铰接,大腿骨、关节垫及膝关节柱组成膝关节,小腿骨上端与膝关节柱固连,小腿骨下端与球形足固连。本发明具有结构紧凑、重量轻、能耗小、易实现快速