
腿足式机器人.pdf

猫巷****奕声

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
腿足式机器人.pdf
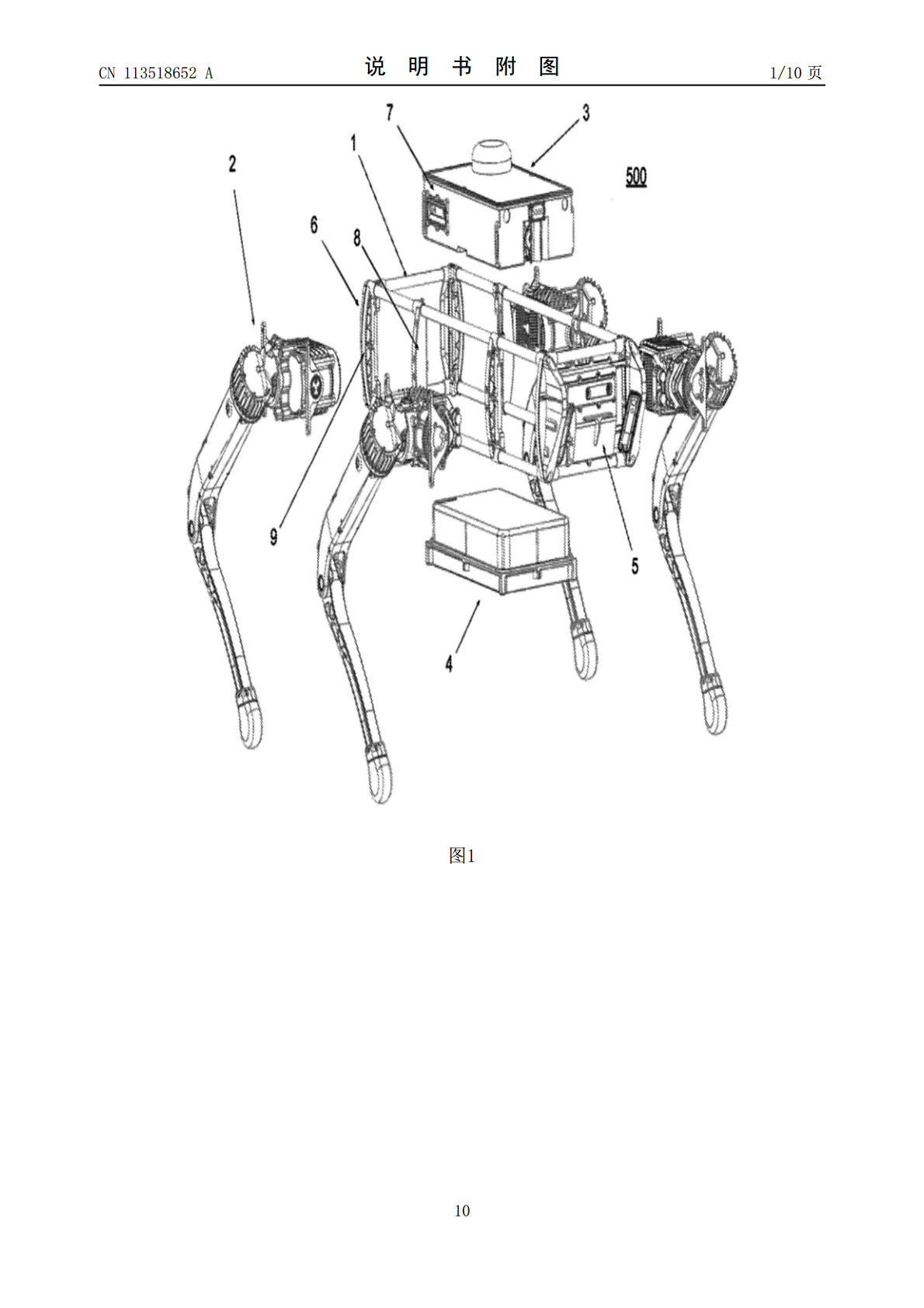
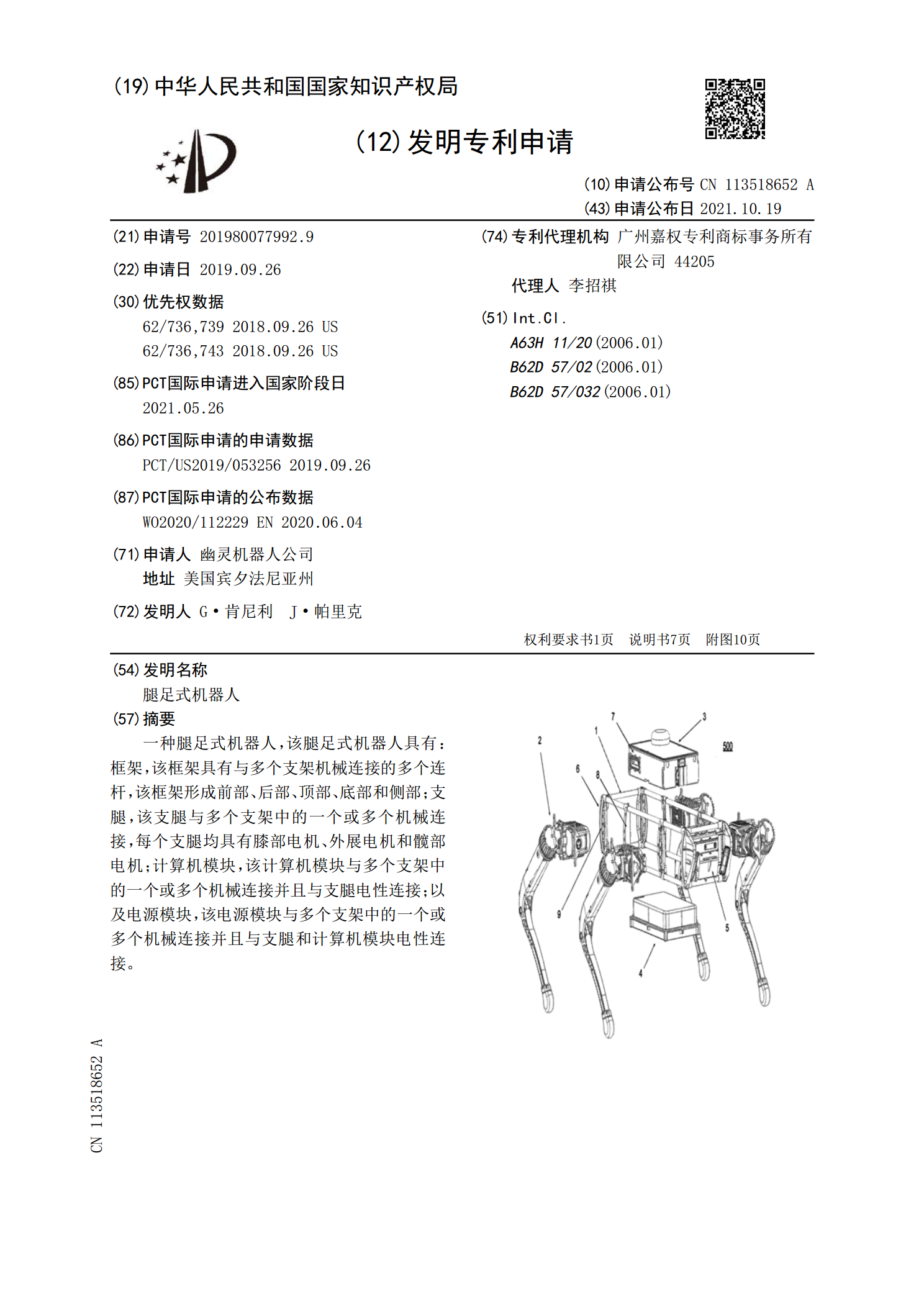
一种腿足式机器人,该腿足式机器人具有:框架,该框架具有与多个支架机械连接的多个连杆,该框架形成前部、后部、顶部、底部和侧部;支腿,该支腿与多个支架中的一个或多个机械连接,每个支腿均具有膝部电机、外展电机和髋部电机;计算机模块,该计算机模块与多个支架中的一个或多个机械连接并且与支腿电性连接;以及电源模块,该电源模块与多个支架中的一个或多个机械连接并且与支腿和计算机模块电性连接。

机器人的轮足式变形腿足机构.pdf
本发明公开了一种机器人的轮足式变形腿足机构,本体支撑件中包括一个本体支撑件伺服电机,其传动连接连接部一端以带动本体抬升或下降;连接部另一端连接固定于主腿,经连接部的牵引使得主腿和本体连动;主腿包括一个主腿伺服电机,其带动主腿相对于连接部运转;小腿包括一个小腿伺服电机,小腿一端经转轴铰链连接于主腿底部,小腿绕转轴相对于主腿成0°~90°夹角转动,小腿伺服电机传动连接轮足以实现轮式运动;还包括一个柔性牵拉部件,连接固定于小腿与主腿之间。本发明的腿部结构在足式行走中将小腿伺服电机收缩于主腿内,结构变形即可成轮式

机械腿结构及足式机器人.pdf
本发明提供了一种机械腿结构及足式机器人,涉及机器人技术领域,本发明提供的机械腿结构包括依次连接的固定座、髋部、大腿部和小腿部,固定座上设有髋部电机、大腿部电机和小腿部电机,髋部电机与髋部之间设有第一齿轮传动机构,以驱动髋部相对于固定座转动,大腿部电机与大腿部之间设有第二齿轮传动机构,以驱动大腿部相对于髋部转动,小腿部电机与小腿部之间设有第三齿轮传动机构,以驱动小腿部相对于大腿部转动。本发明提供的机械腿结构有效的减小了大腿部及小腿部的重量,且髋部、大腿部、小腿部运动均由齿轮传动机构驱动,均可实现大幅度的转动
六足腿式导盲机器人.pdf
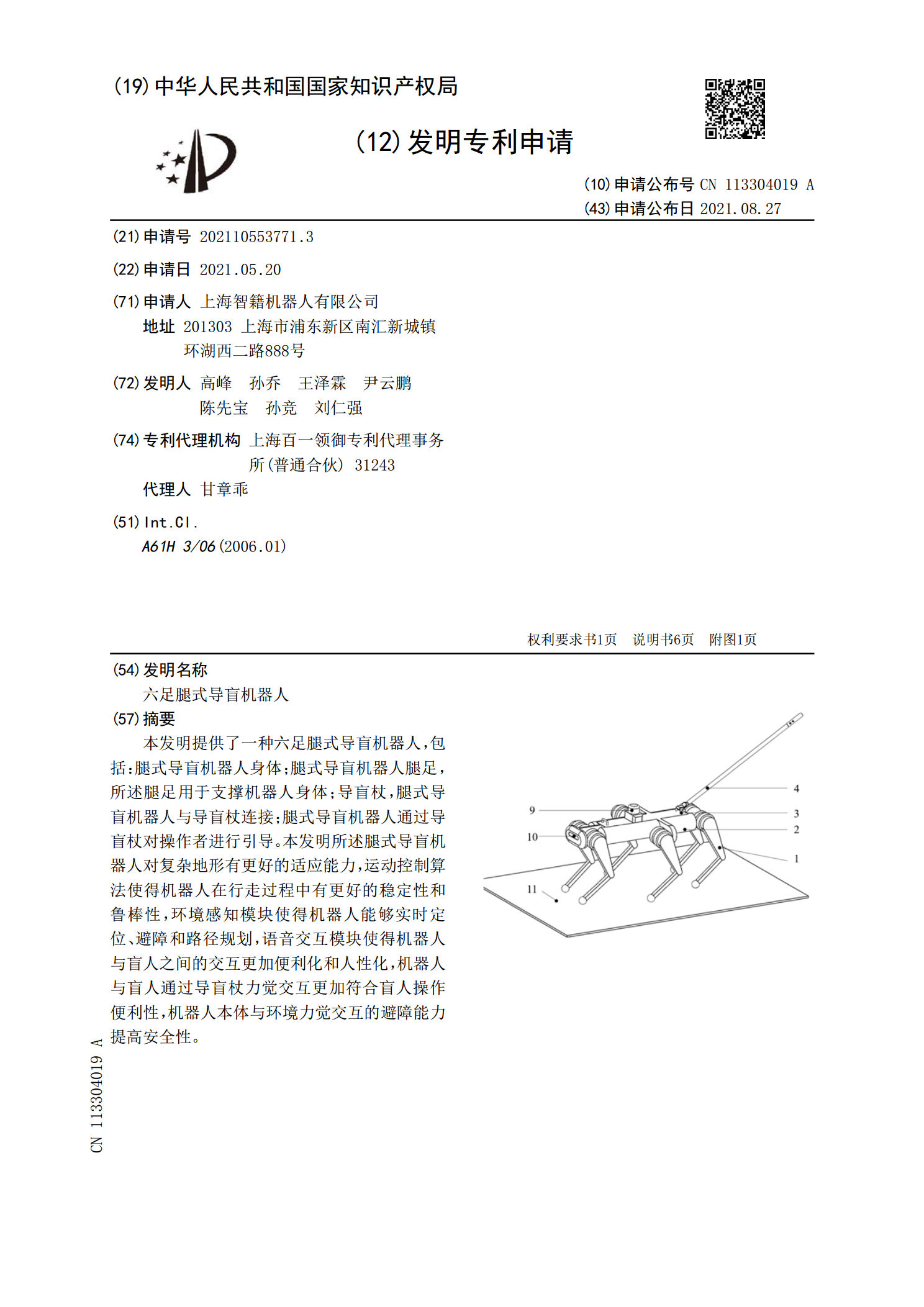
本发明提供了一种六足腿式导盲机器人,包括:腿式导盲机器人身体;腿式导盲机器人腿足,所述腿足用于支撑机器人身体;导盲杖,腿式导盲机器人与导盲杖连接;腿式导盲机器人通过导盲杖对操作者进行引导。本发明所述腿式导盲机器人对复杂地形有更好的适应能力,运动控制算法使得机器人在行走过程中有更好的稳定性和鲁棒性,环境感知模块使得机器人能够实时定位、避障和路径规划,语音交互模块使得机器人与盲人之间的交互更加便利化和人性化,机器人与盲人通过导盲杖力觉交互更加符合盲人操作便利性,机器人本体与环境力觉交互的避障能力提高安全性。
四关节液压足式机器人腿.pdf
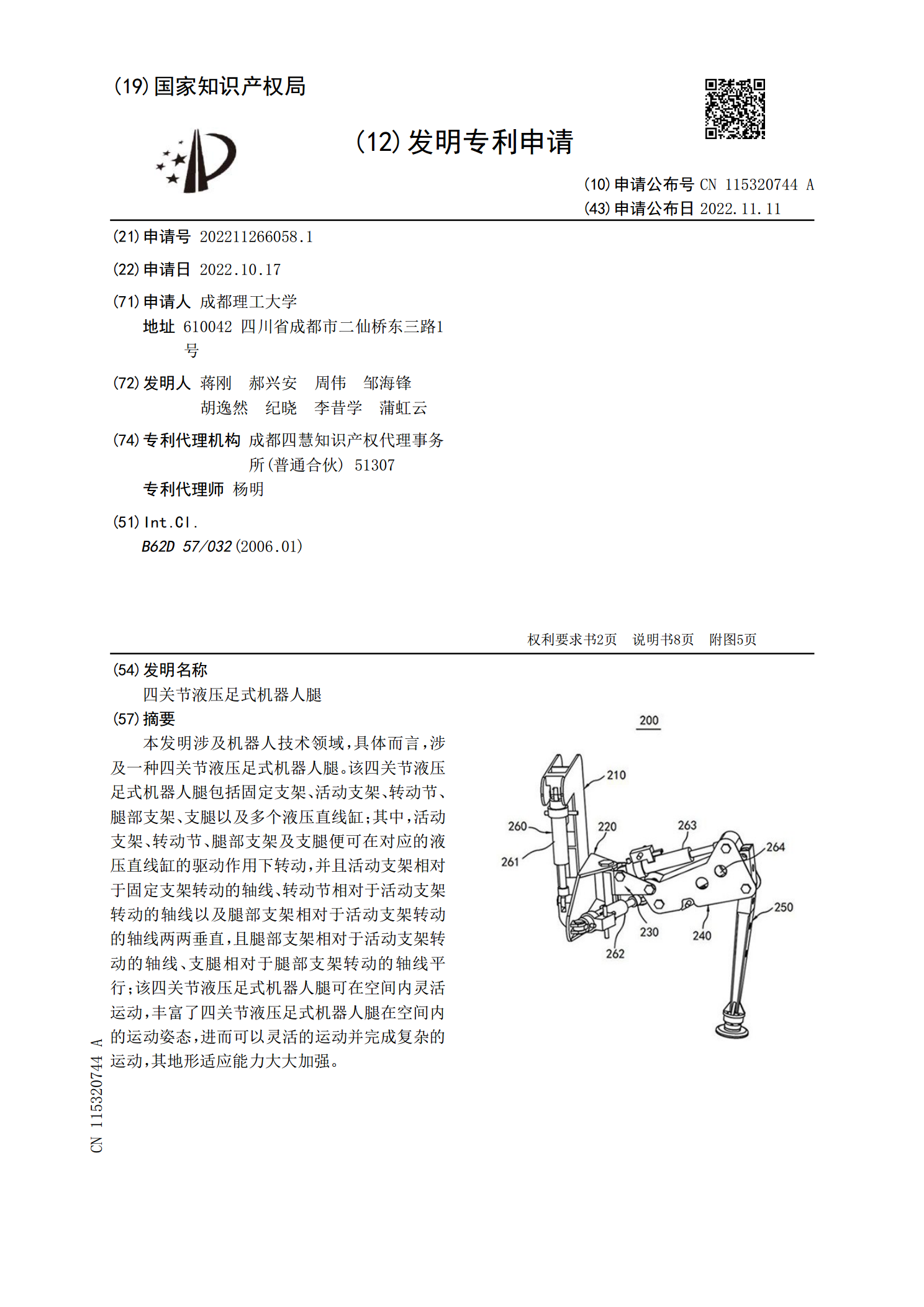
本发明涉及机器人技术领域,具体而言,涉及一种四关节液压足式机器人腿。该四关节液压足式机器人腿包括固定支架、活动支架、转动节、腿部支架、支腿以及多个液压直线缸;其中,活动支架、转动节、腿部支架及支腿便可在对应的液压直线缸的驱动作用下转动,并且活动支架相对于固定支架转动的轴线、转动节相对于活动支架转动的轴线以及腿部支架相对于活动支架转动的轴线两两垂直,且腿部支架相对于活动支架转动的轴线、支腿相对于腿部支架转动的轴线平行;该四关节液压足式机器人腿可在空间内灵活运动,丰富了四关节液压足式机器人腿在空间内的运动姿态