
一种足式机器人驱动腿机构.pdf

白真****ng


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种足式机器人驱动腿机构.pdf
本发明提供一种足式机器人驱动腿机构,属于足式机器人技术领域。该驱动腿机构包括腿支架、大腿骨、大腿前摆缸、大腿前拉索、大腿前滑轮、小腿前滑轮、小腿前拉索、小腿前摆缸、关节垫、小腿骨、球形足、小腿后拉索、小腿后摆缸、小腿后滑轮、大腿后滑轮、大腿后拉索、大腿后摆缸、膝关节柱、髋关节柱;腿支架与髋关节柱铰接组成髋关节,大腿骨上端与髋关节柱固连,关节垫位于大腿骨的下端并与膝关节柱铰接,大腿骨、关节垫及膝关节柱组成膝关节,小腿骨上端与膝关节柱固连,小腿骨下端与球形足固连。本发明具有结构紧凑、重量轻、能耗小、易实现快速

机器人的轮足式变形腿足机构.pdf
本发明公开了一种机器人的轮足式变形腿足机构,本体支撑件中包括一个本体支撑件伺服电机,其传动连接连接部一端以带动本体抬升或下降;连接部另一端连接固定于主腿,经连接部的牵引使得主腿和本体连动;主腿包括一个主腿伺服电机,其带动主腿相对于连接部运转;小腿包括一个小腿伺服电机,小腿一端经转轴铰链连接于主腿底部,小腿绕转轴相对于主腿成0°~90°夹角转动,小腿伺服电机传动连接轮足以实现轮式运动;还包括一个柔性牵拉部件,连接固定于小腿与主腿之间。本发明的腿部结构在足式行走中将小腿伺服电机收缩于主腿内,结构变形即可成轮式

一种足式机器人的腿足弹性装置.pdf
本发明公开了一种足式机器人的腿足弹性装置,包括第一足板和第二足板,所述第一足板顶部的中心处固定连接有连接杆的下端,且第一足板的内部开设有内腔,并且内腔的内部放置有活动板,所述内腔的底部预留有通槽,且通槽的内部贯穿有连接板,并且连接板的顶部固定连接于活动板底部的中心处,所述连接板的底部固定连接有第二足板,且第二足板的底部设置有橡胶防滑块;本发明通过设置有第一弹簧、减震橡胶、第二弹簧和第三弹簧,保证了机器人在行走时,具有四重缓冲的效果,从而对机器人内部的精密零件起到了良好的保护作用,延长了机器人的使用寿命。
腿足式机器人.pdf
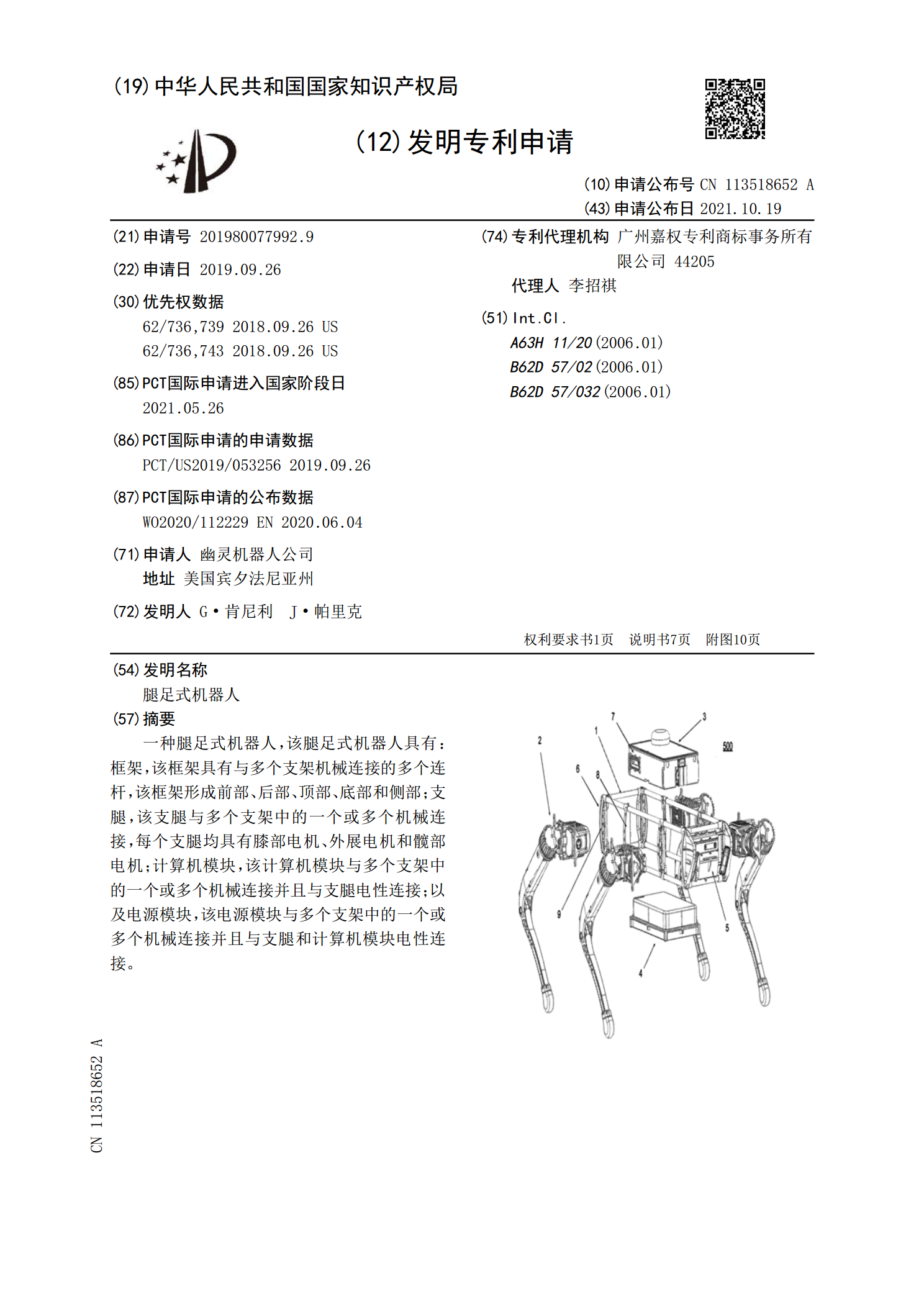
一种腿足式机器人,该腿足式机器人具有:框架,该框架具有与多个支架机械连接的多个连杆,该框架形成前部、后部、顶部、底部和侧部;支腿,该支腿与多个支架中的一个或多个机械连接,每个支腿均具有膝部电机、外展电机和髋部电机;计算机模块,该计算机模块与多个支架中的一个或多个机械连接并且与支腿电性连接;以及电源模块,该电源模块与多个支架中的一个或多个机械连接并且与支腿和计算机模块电性连接。

履带轮驱动轮腿式可旋转四足机器人.pdf
本发明提供的是一种履带轮驱动轮腿式可旋转四足机器人。包括机架,在机架的前方和后方均对称设置行走机构,四套行走机构的结构相同,所述行走机构的组成包括腿旋转机构、足旋转机构和足驱动机构;所述腿旋转机构包括腿旋转电机和腿架,所述足旋转机构旋转电机、足旋转架、足转向电机和足连接架,所述驱动足机构包括足体、第一足履带、第二足履带、第一足履带轮、第二足履带轮、第三足履带轮、第四足履带轮、足驱动电机和足变速箱。本发明结构简单,姿态控制容易,通过控制电机的转速和转向即可对机器人姿态、前进速度和方向进行控制,使机器人实现各