
一种涂覆机构及熔断器涂覆设备.pdf

猫巷****提格

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种涂覆机构及熔断器涂覆设备.pdf
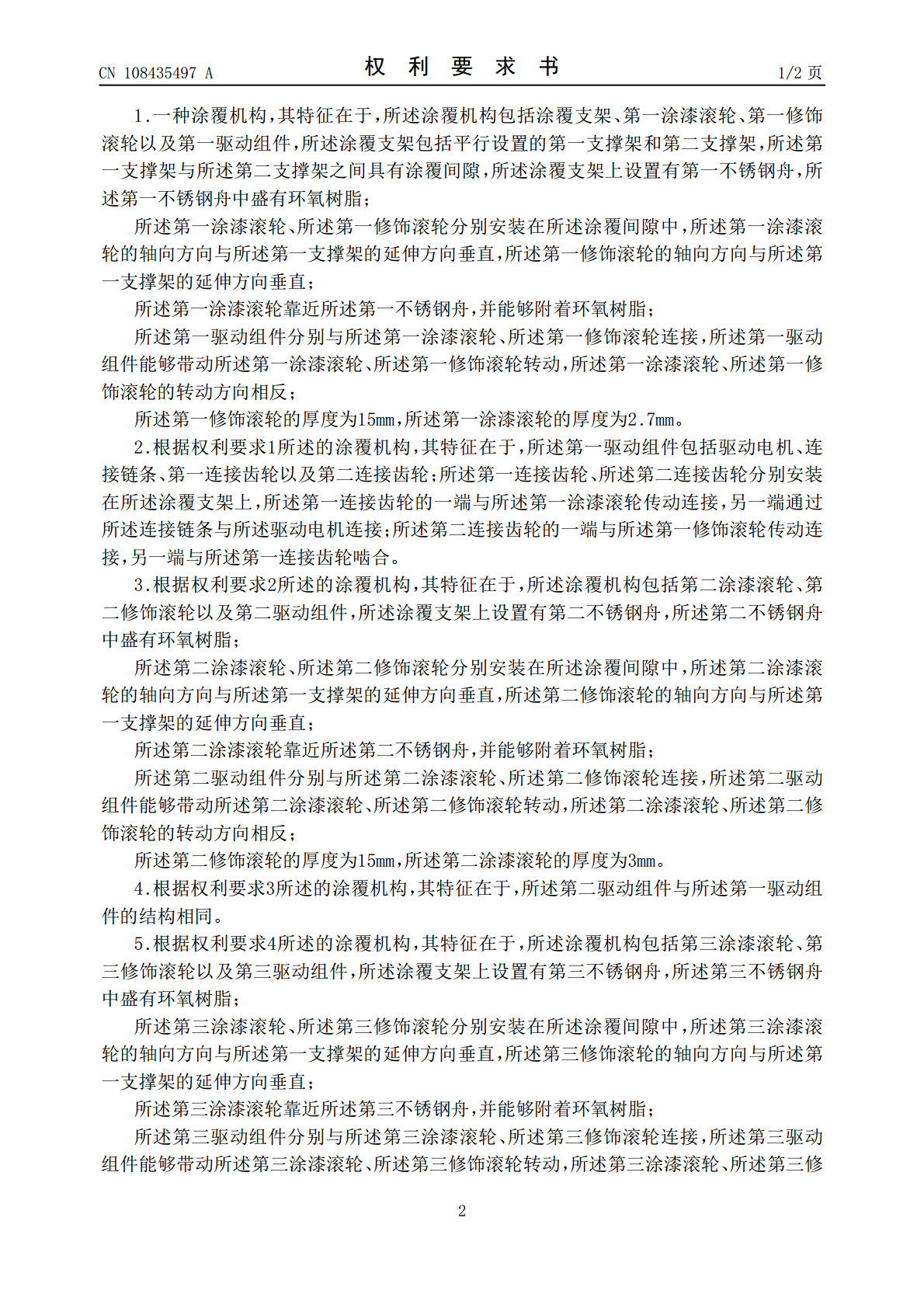
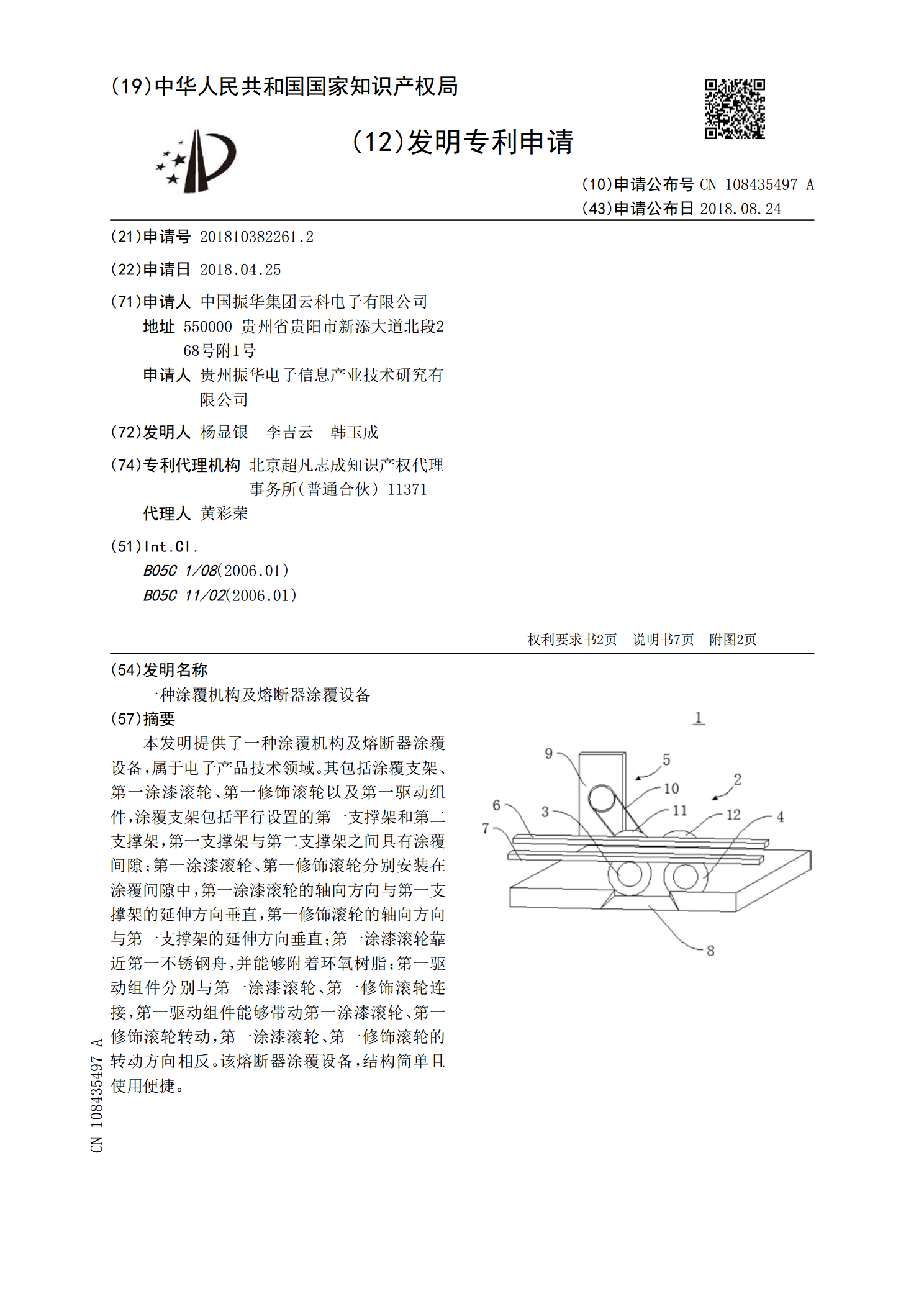
本发明提供了一种涂覆机构及熔断器涂覆设备,属于电子产品技术领域。其包括涂覆支架、第一涂漆滚轮、第一修饰滚轮以及第一驱动组件,涂覆支架包括平行设置的第一支撑架和第二支撑架,第一支撑架与第二支撑架之间具有涂覆间隙;第一涂漆滚轮、第一修饰滚轮分别安装在涂覆间隙中,第一涂漆滚轮的轴向方向与第一支撑架的延伸方向垂直,第一修饰滚轮的轴向方向与第一支撑架的延伸方向垂直;第一涂漆滚轮靠近第一不锈钢舟,并能够附着环氧树脂;第一驱动组件分别与第一涂漆滚轮、第一修饰滚轮连接,第一驱动组件能够带动第一涂漆滚轮、第一修饰滚轮转动,
涂覆机构及涂覆机器人.pdf
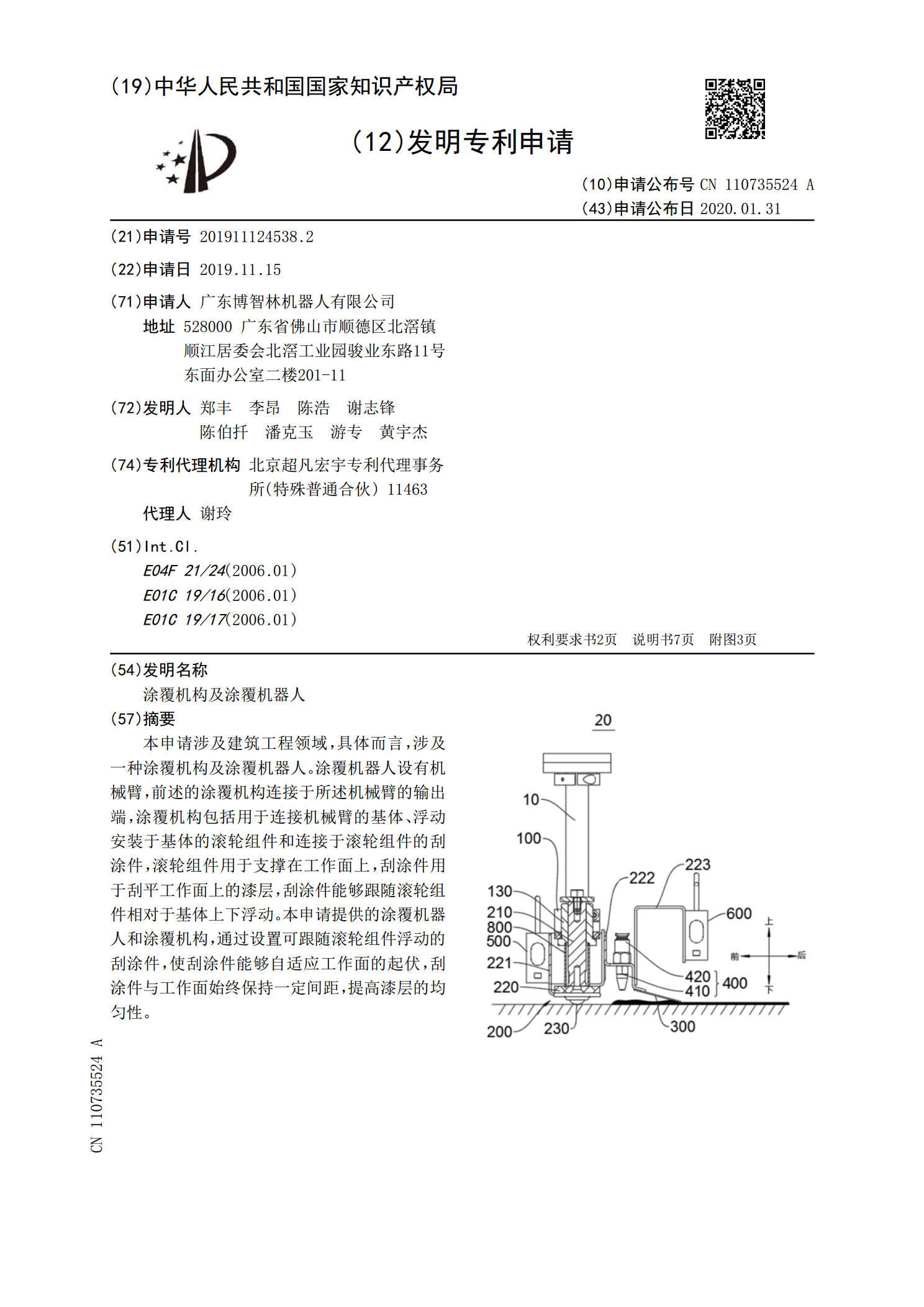
本申请涉及建筑工程领域,具体而言,涉及一种涂覆机构及涂覆机器人。涂覆机器人设有机械臂,前述的涂覆机构连接于所述机械臂的输出端,涂覆机构包括用于连接机械臂的基体、浮动安装于基体的滚轮组件和连接于滚轮组件的刮涂件,滚轮组件用于支撑在工作面上,刮涂件用于刮平工作面上的漆层,刮涂件能够跟随滚轮组件相对于基体上下浮动。本申请提供的涂覆机器人和涂覆机构,通过设置可跟随滚轮组件浮动的刮涂件,使刮涂件能够自适应工作面的起伏,刮涂件与工作面始终保持一定间距,提高漆层的均匀性。
涂覆方法及相应的涂覆设备.pdf
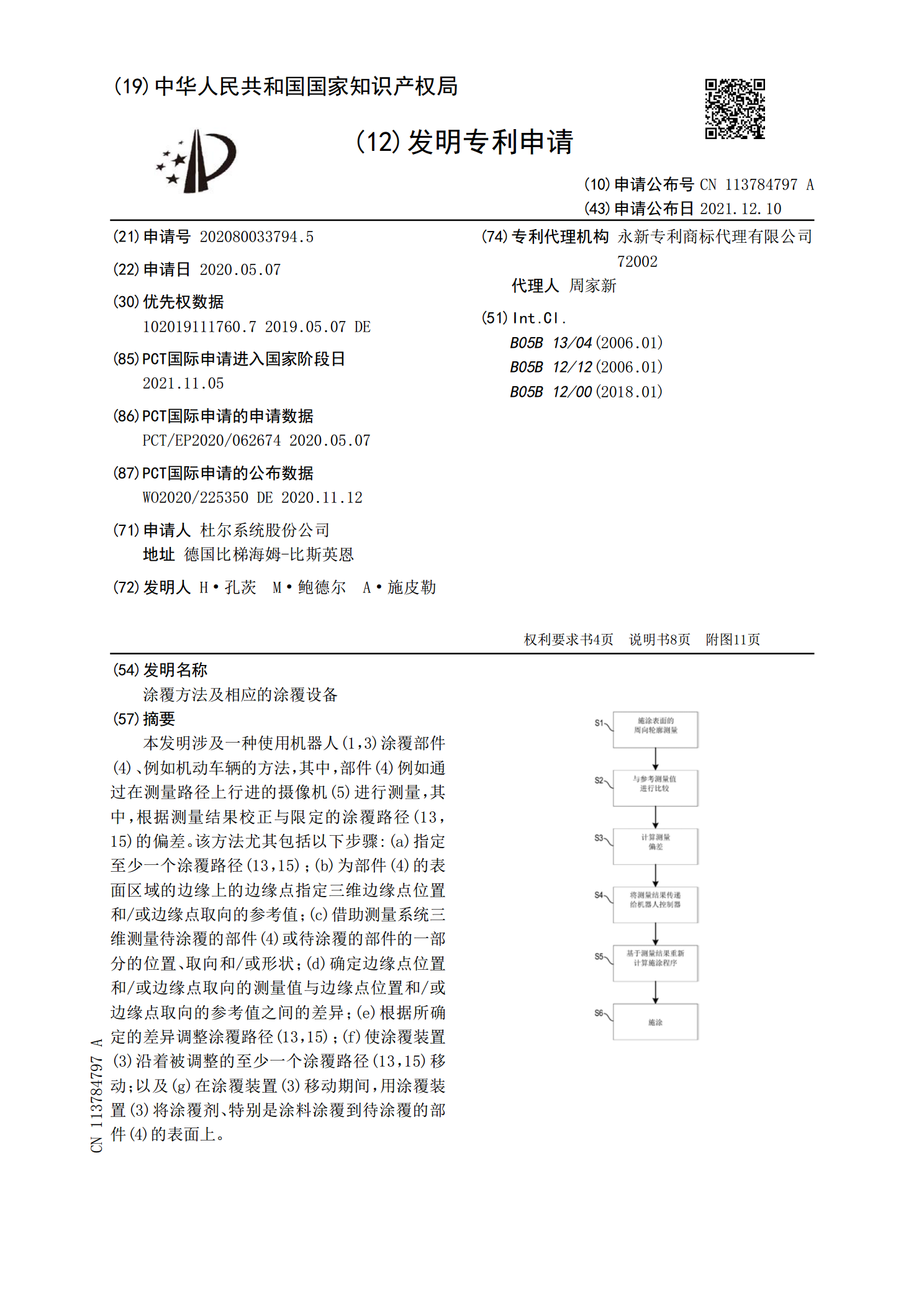
本发明涉及一种使用机器人(1,3)涂覆部件(4)、例如机动车辆的方法,其中,部件(4)例如通过在测量路径上行进的摄像机(5)进行测量,其中,根据测量结果校正与限定的涂覆路径(13,15)的偏差。该方法尤其包括以下步骤:(a)指定至少一个涂覆路径(13,15);(b)为部件(4)的表面区域的边缘上的边缘点指定三维边缘点位置和/或边缘点取向的参考值;(c)借助测量系统三维测量待涂覆的部件(4)或待涂覆的部件的一部分的位置、取向和/或形状;(d)确定边缘点位置和/或边缘点取向的测量值与边缘点位置和/或边缘点取向
涂覆方法及相应的涂覆设备.pdf
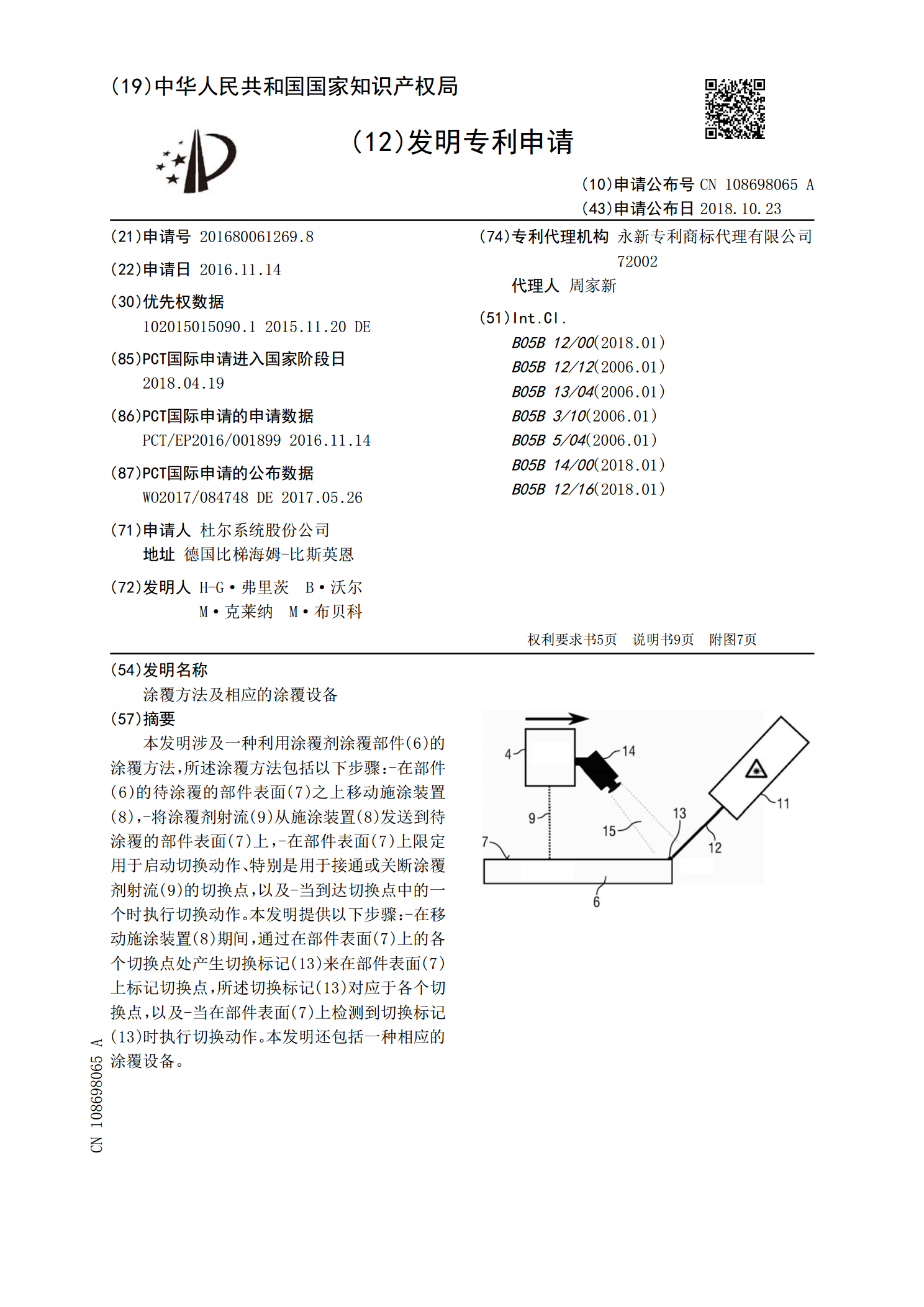
本发明涉及一种利用涂覆剂涂覆部件(6)的涂覆方法,所述涂覆方法包括以下步骤:‑在部件(6)的待涂覆的部件表面(7)之上移动施涂装置(8),‑将涂覆剂射流(9)从施涂装置(8)发送到待涂覆的部件表面(7)上,‑在部件表面(7)上限定用于启动切换动作、特别是用于接通或关断涂覆剂射流(9)的切换点,以及‑当到达切换点中的一个时执行切换动作。本发明提供以下步骤:‑在移动施涂装置(8)期间,通过在部件表面(7)上的各个切换点处产生切换标记(13)来在部件表面(7)上标记切换点,所述切换标记(13)对应于各个切换点,
用于涂覆部件的涂覆设备.pdf
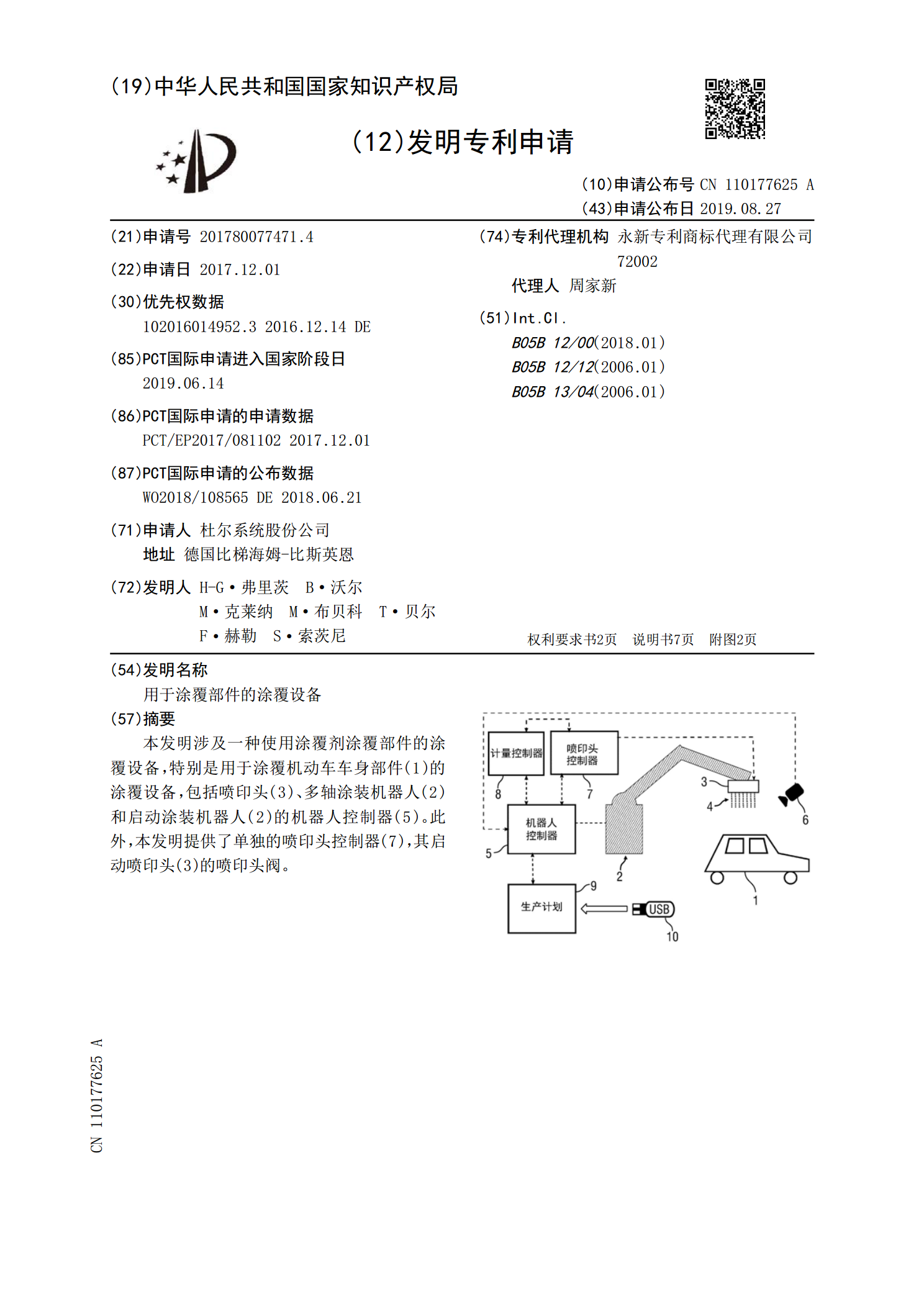
本发明涉及一种使用涂覆剂涂覆部件的涂覆设备,特别是用于涂覆机动车车身部件(1)的涂覆设备,包括喷印头(3)、多轴涂装机器人(2)和启动涂装机器人(2)的机器人控制器(5)。此外,本发明提供了单独的喷印头控制器(7),其启动喷印头(3)的喷印头阀。