
多差速驱动单元AGV路径跟踪方法及设备、存储介质.pdf

是向****23

1/10
2/10
3/10
4/10

5/10
6/10
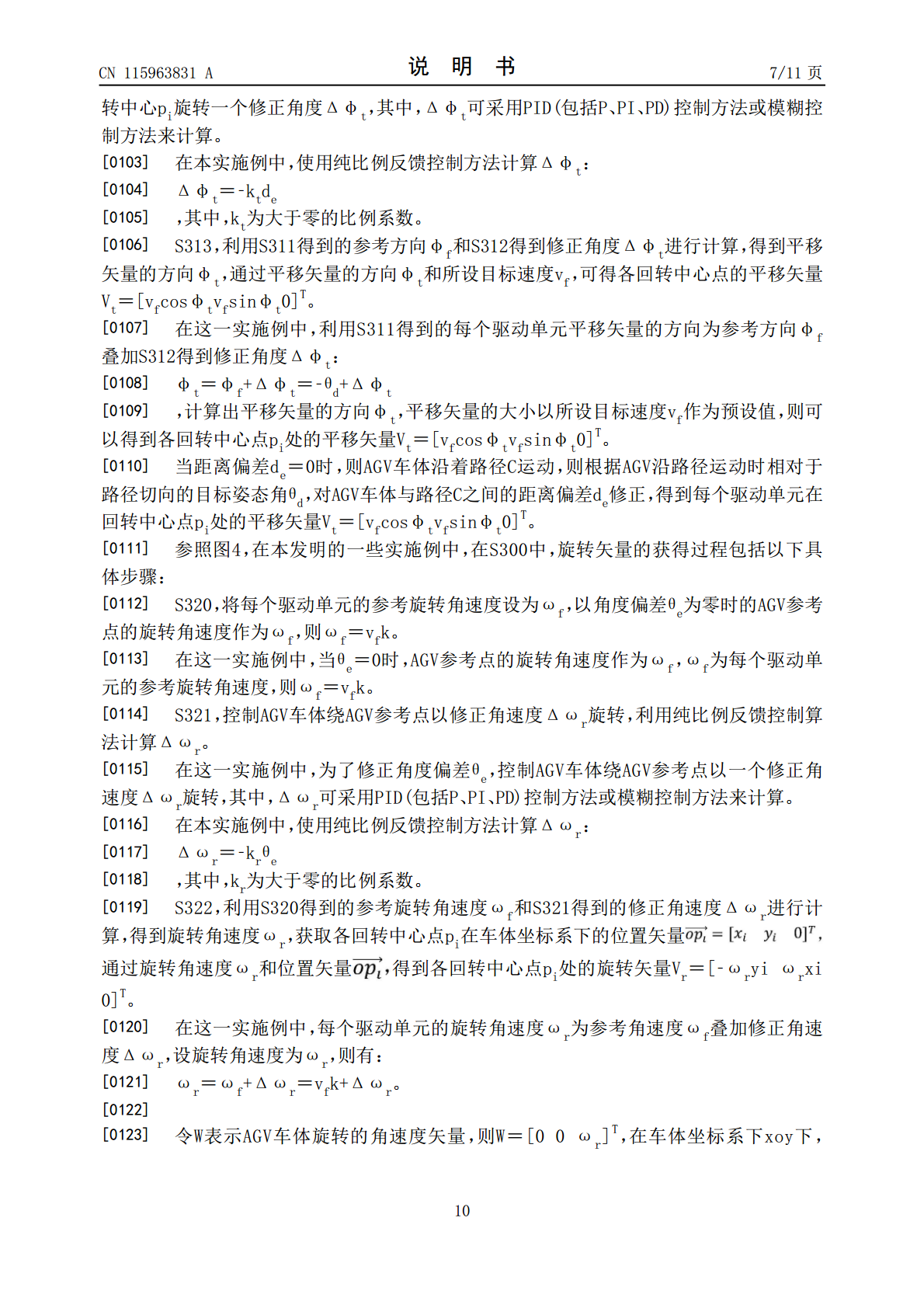
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多差速驱动单元AGV路径跟踪方法及设备、存储介质.pdf
本发明公开了一种多差速驱动单元AGV路径跟踪方法及设备、存储介质,方法包括:根据AGV车体与路径之间的距离偏差和角度偏差,对AGV车体下每个驱动单元进行修正,得到速度矢量,再根据每个驱动单元自身的转角偏差,对各自驱动单元进行修正,得到驱动坐标系的旋转角速度,建立差速驱动单元的运动学关系,检验修正得到精确度高、误差少的每个驱动单元的左右驱动轮的设定速度。本发明针对采用无轨导航的多差速驱动单元结构的AGV,提供一种简单可靠且通用性强的路径跟踪控制方法。建立驱动单元的驱动坐标系,不依赖于驱动单元的布局,可使AG
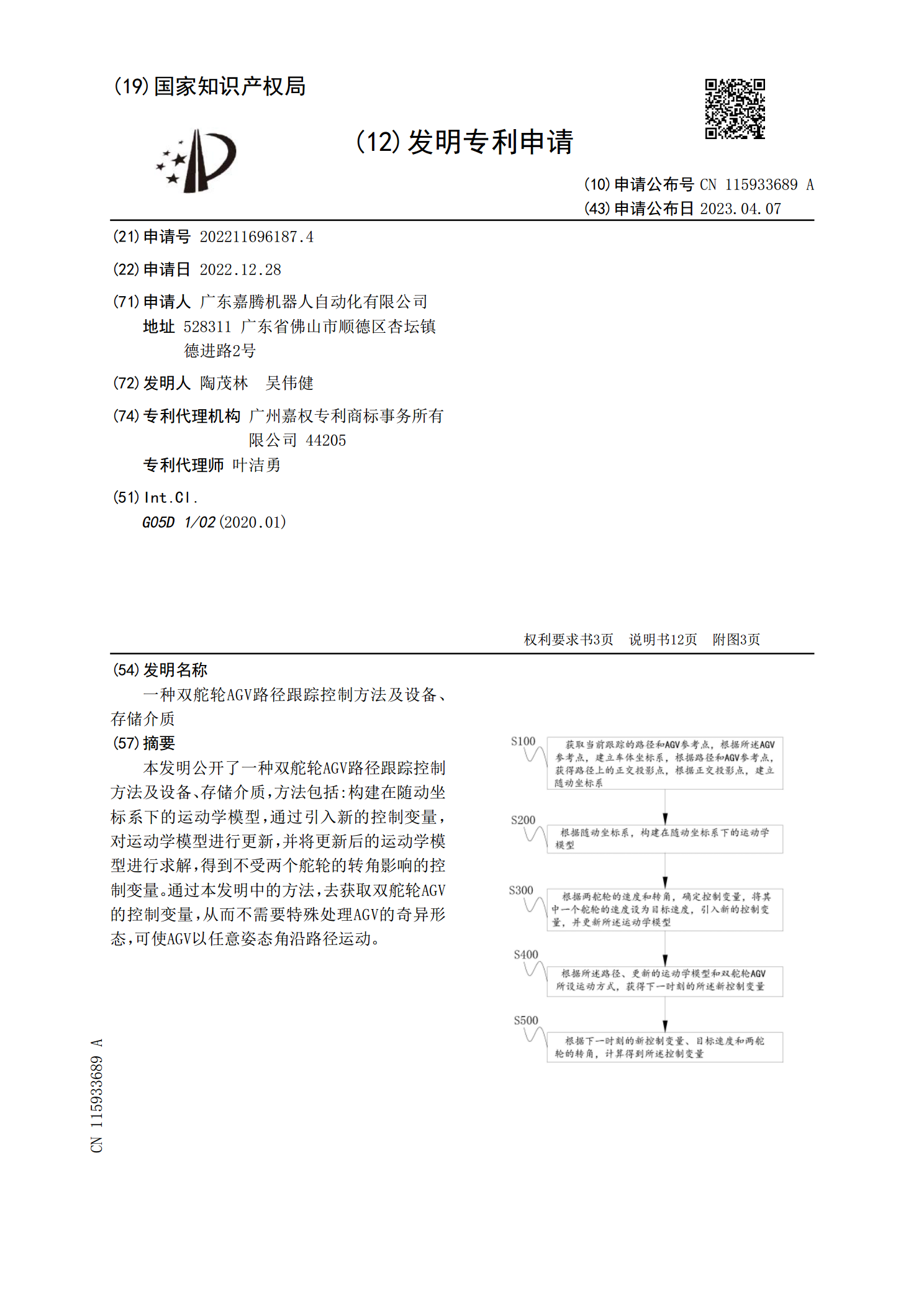
一种双舵轮AGV路径跟踪控制方法及设备、存储介质.pdf
本发明公开了一种双舵轮AGV路径跟踪控制方法及设备、存储介质,方法包括:构建在随动坐标系下的运动学模型,通过引入新的控制变量,对运动学模型进行更新,并将更新后的运动学模型进行求解,得到不受两个舵轮的转角影响的控制变量。通过本发明中的方法,去获取双舵轮AGV的控制变量,从而不需要特殊处理AGV的奇异形态,可使AGV以任意姿态角沿路径运动。
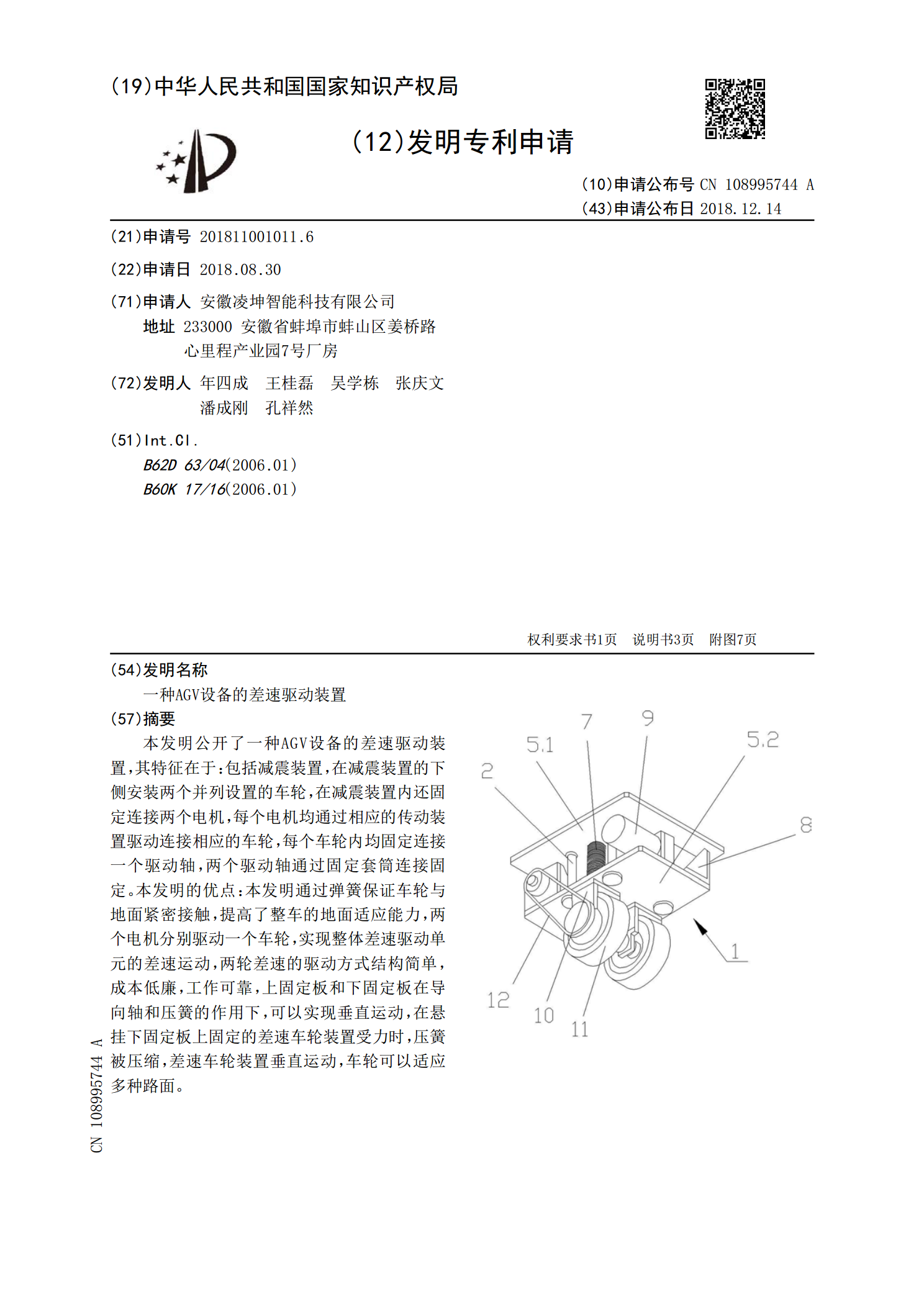
一种AGV设备的差速驱动装置.pdf
本发明公开了一种AGV设备的差速驱动装置,其特征在于:包括减震装置,在减震装置的下侧安装两个并列设置的车轮,在减震装置内还固定连接两个电机,每个电机均通过相应的传动装置驱动连接相应的车轮,每个车轮内均固定连接一个驱动轴,两个驱动轴通过固定套筒连接固定。本发明的优点:本发明通过弹簧保证车轮与地面紧密接触,提高了整车的地面适应能力,两个电机分别驱动一个车轮,实现整体差速驱动单元的差速运动,两轮差速的驱动方式结构简单,成本低廉,工作可靠,上固定板和下固定板在导向轴和压簧的作用下,可以实现垂直运动,在悬挂下固定板

差速驱动式AGV控制系统及自动循迹方法.pdf
为了对差速驱动式AGV建立一个完整的控制系统,以实现AGV对路径的可靠跟踪,本发明提供了一种差速驱动式AGV控制系统及自动循迹方法,其中系统包括轨迹检测装置和控制器;控制器包括数据处理模块、数据收发模块和控制模块;数据处理模块包括左右轮差速比获取模块和左右轮速度获取模块;轨迹检测装置的输入端与AGV的驱动部件相连,输出端与所述左右轮差速比获取模块的输入端相连;左右轮差速比获取模块的输出端和数据收发模块的输出端均与所述左右轮速度获取模块的输入端相连;左右轮速度获取模块的输出端与所述控制模块的输入端相连;控制

全向差速驱动轮装置及AGV小车.pdf
本发明涉及物流搬运设备领域,尤其是涉及一种全向差速驱动轮装置及应用该装置的AGV小车;该装置包括:固定座、驱动装置、差速器、车轮和转向装置;差速器安装在固定座上,差速器的两输出端分别通过轮轴连接所述车轮;所述驱动装置与所述差速器连接,以提供动力;所述转向装置安装在固定座上,同时,所述转向装置与小车连接,以实现小车全向运动。本装置具有结构简单、成本低,控制难度低的优点。该小车包括上述的全向差速驱动轮装置,具备全向移动的功能,能够提高生产或者存储的效率。