
一种AGV设备的差速驱动装置.pdf

猫巷****永安


1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种AGV设备的差速驱动装置.pdf
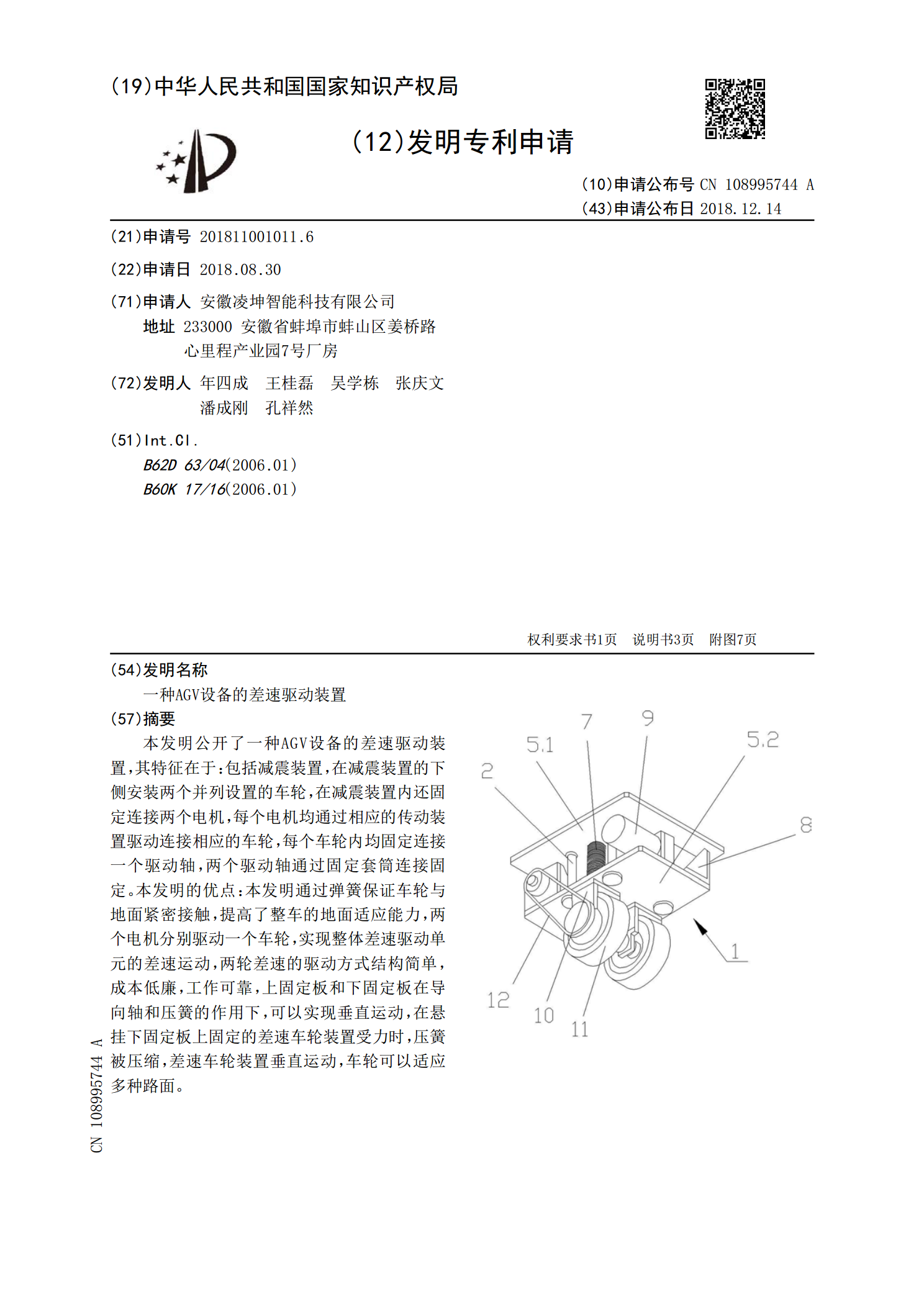
本发明公开了一种AGV设备的差速驱动装置,其特征在于:包括减震装置,在减震装置的下侧安装两个并列设置的车轮,在减震装置内还固定连接两个电机,每个电机均通过相应的传动装置驱动连接相应的车轮,每个车轮内均固定连接一个驱动轴,两个驱动轴通过固定套筒连接固定。本发明的优点:本发明通过弹簧保证车轮与地面紧密接触,提高了整车的地面适应能力,两个电机分别驱动一个车轮,实现整体差速驱动单元的差速运动,两轮差速的驱动方式结构简单,成本低廉,工作可靠,上固定板和下固定板在导向轴和压簧的作用下,可以实现垂直运动,在悬挂下固定板

全向差速驱动轮装置及AGV小车.pdf
本发明涉及物流搬运设备领域,尤其是涉及一种全向差速驱动轮装置及应用该装置的AGV小车;该装置包括:固定座、驱动装置、差速器、车轮和转向装置;差速器安装在固定座上,差速器的两输出端分别通过轮轴连接所述车轮;所述驱动装置与所述差速器连接,以提供动力;所述转向装置安装在固定座上,同时,所述转向装置与小车连接,以实现小车全向运动。本装置具有结构简单、成本低,控制难度低的优点。该小车包括上述的全向差速驱动轮装置,具备全向移动的功能,能够提高生产或者存储的效率。
支撑轮均采用双轮差速驱动装置的AGV底盘架.pdf
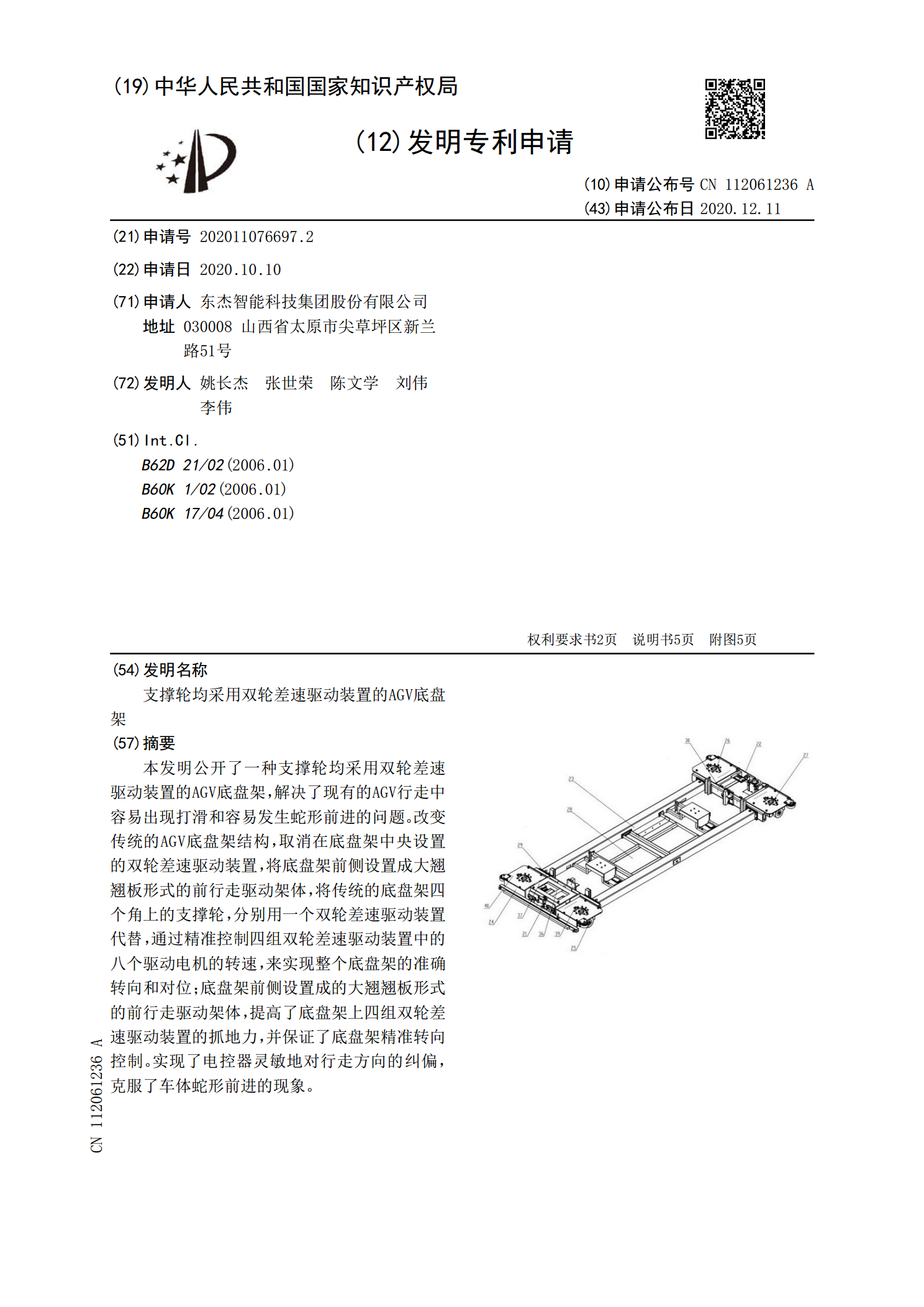
本发明公开了一种支撑轮均采用双轮差速驱动装置的AGV底盘架,解决了现有的AGV行走中容易出现打滑和容易发生蛇形前进的问题。改变传统的AGV底盘架结构,取消在底盘架中央设置的双轮差速驱动装置,将底盘架前侧设置成大翘翘板形式的前行走驱动架体,将传统的底盘架四个角上的支撑轮,分别用一个双轮差速驱动装置代替,通过精准控制四组双轮差速驱动装置中的八个驱动电机的转速,来实现整个底盘架的准确转向和对位;底盘架前侧设置成的大翘翘板形式的前行走驱动架体,提高了底盘架上四组双轮差速驱动装置的抓地力,并保证了底盘架精准转向控制
一种差速驱动装置.pdf
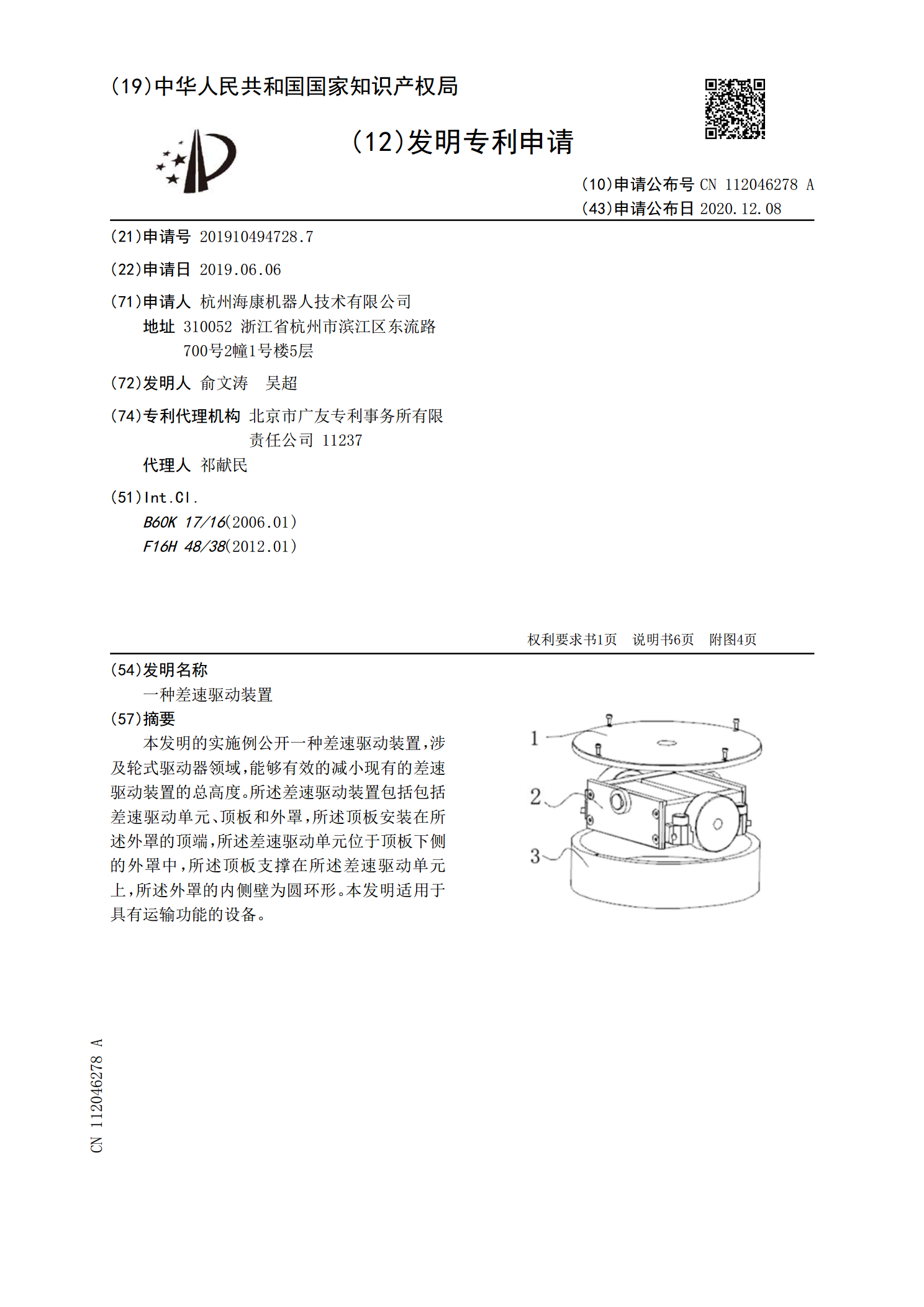
本发明的实施例公开一种差速驱动装置,涉及轮式驱动器领域,能够有效的减小现有的差速驱动装置的总高度。所述差速驱动装置包括包括差速驱动单元、顶板和外罩,所述顶板安装在所述外罩的顶端,所述差速驱动单元位于顶板下侧的外罩中,所述顶板支撑在所述差速驱动单元上,所述外罩的内侧壁为圆环形。本发明适用于具有运输功能的设备。
一种差速驱动装置.pdf
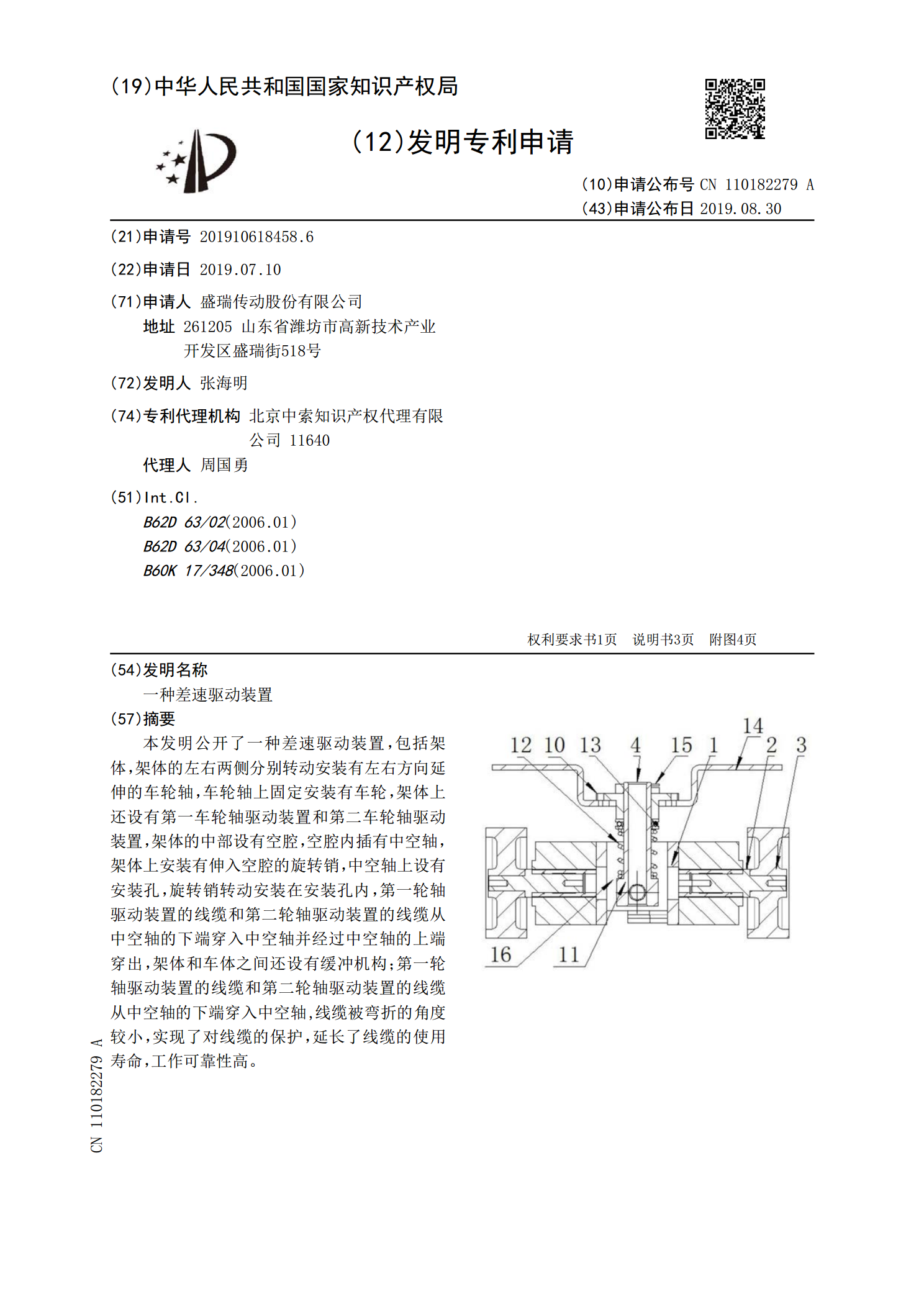
本发明公开了一种差速驱动装置,包括架体,架体的左右两侧分别转动安装有左右方向延伸的车轮轴,车轮轴上固定安装有车轮,架体上还设有第一车轮轴驱动装置和第二车轮轴驱动装置,架体的中部设有空腔,空腔内插有中空轴,架体上安装有伸入空腔的旋转销,中空轴上设有安装孔,旋转销转动安装在安装孔内,第一轮轴驱动装置的线缆和第二轮轴驱动装置的线缆从中空轴的下端穿入中空轴并经过中空轴的上端穿出,架体和车体之间还设有缓冲机构;第一轮轴驱动装置的线缆和第二轮轴驱动装置的线缆从中空轴的下端穿入中空轴,线缆被弯折的角度较小,实现了对线缆