
差速驱动式AGV控制系统及自动循迹方法.pdf

是湛****21

1/9
2/9

3/9
4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

差速驱动式AGV控制系统及自动循迹方法.pdf
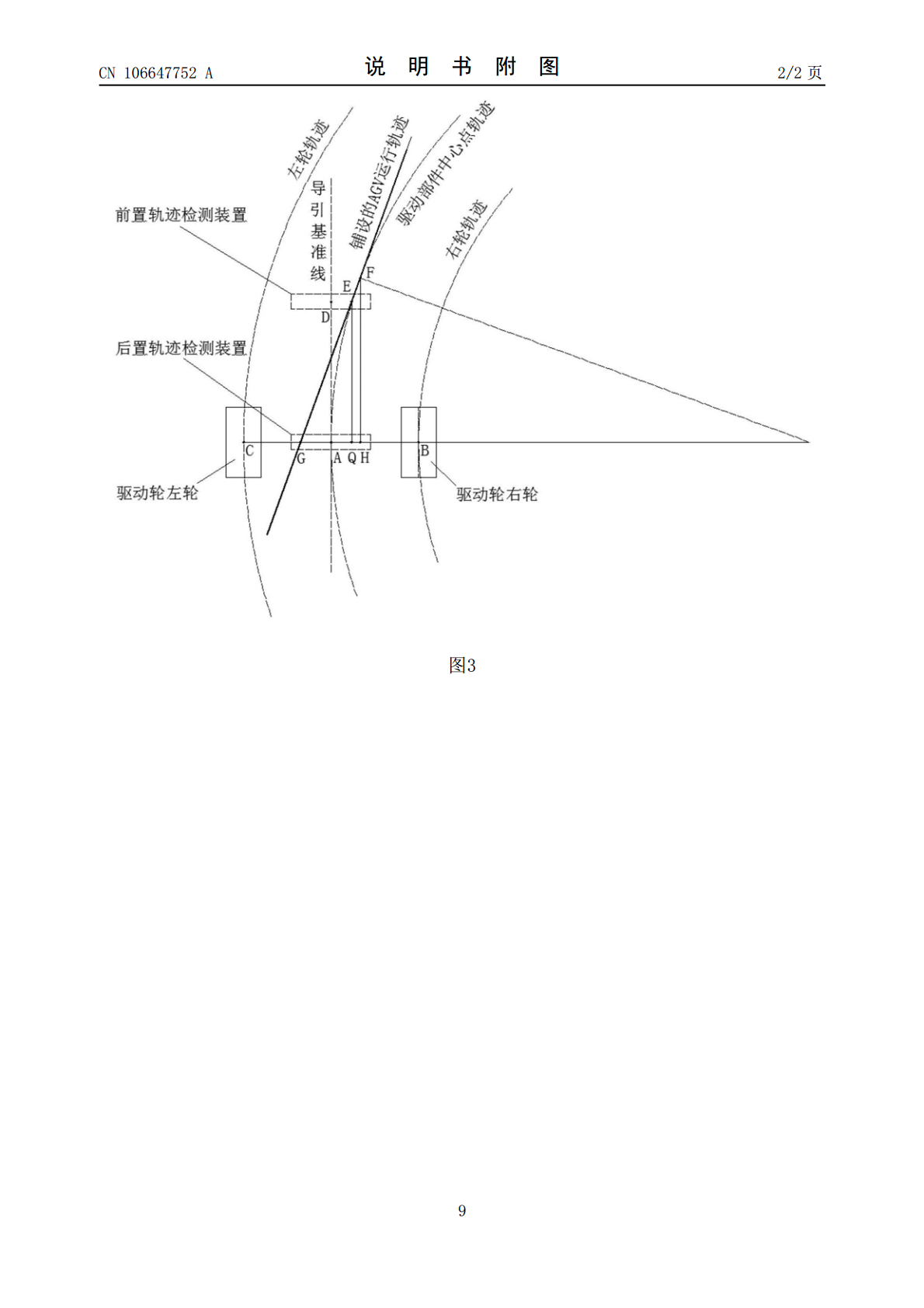
为了对差速驱动式AGV建立一个完整的控制系统,以实现AGV对路径的可靠跟踪,本发明提供了一种差速驱动式AGV控制系统及自动循迹方法,其中系统包括轨迹检测装置和控制器;控制器包括数据处理模块、数据收发模块和控制模块;数据处理模块包括左右轮差速比获取模块和左右轮速度获取模块;轨迹检测装置的输入端与AGV的驱动部件相连,输出端与所述左右轮差速比获取模块的输入端相连;左右轮差速比获取模块的输出端和数据收发模块的输出端均与所述左右轮速度获取模块的输入端相连;左右轮速度获取模块的输出端与所述控制模块的输入端相连;控制
双差速驱动AGV转向运动的控制系统.pdf
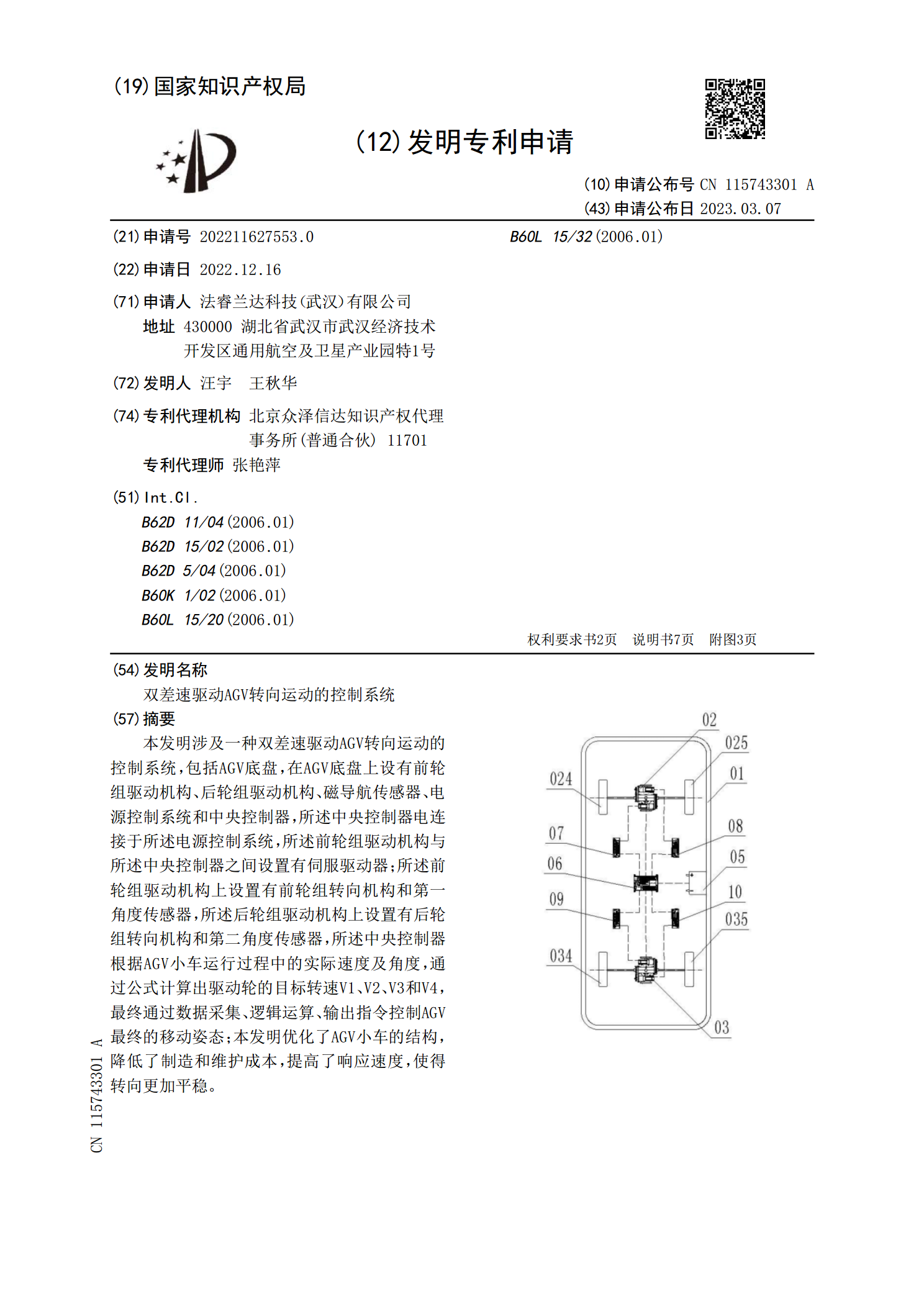
本发明涉及一种双差速驱动AGV转向运动的控制系统,包括AGV底盘,在AGV底盘上设有前轮组驱动机构、后轮组驱动机构、磁导航传感器、电源控制系统和中央控制器,所述中央控制器电连接于所述电源控制系统,所述前轮组驱动机构与所述中央控制器之间设置有伺服驱动器;所述前轮组驱动机构上设置有前轮组转向机构和第一角度传感器,所述后轮组驱动机构上设置有后轮组转向机构和第二角度传感器,所述中央控制器根据AGV小车运行过程中的实际速度及角度,通过公式计算出驱动轮的目标转速V1、V2、V3和V4,最终通过数据采集、逻辑运算、输出
一种AGV设备的差速驱动装置.pdf
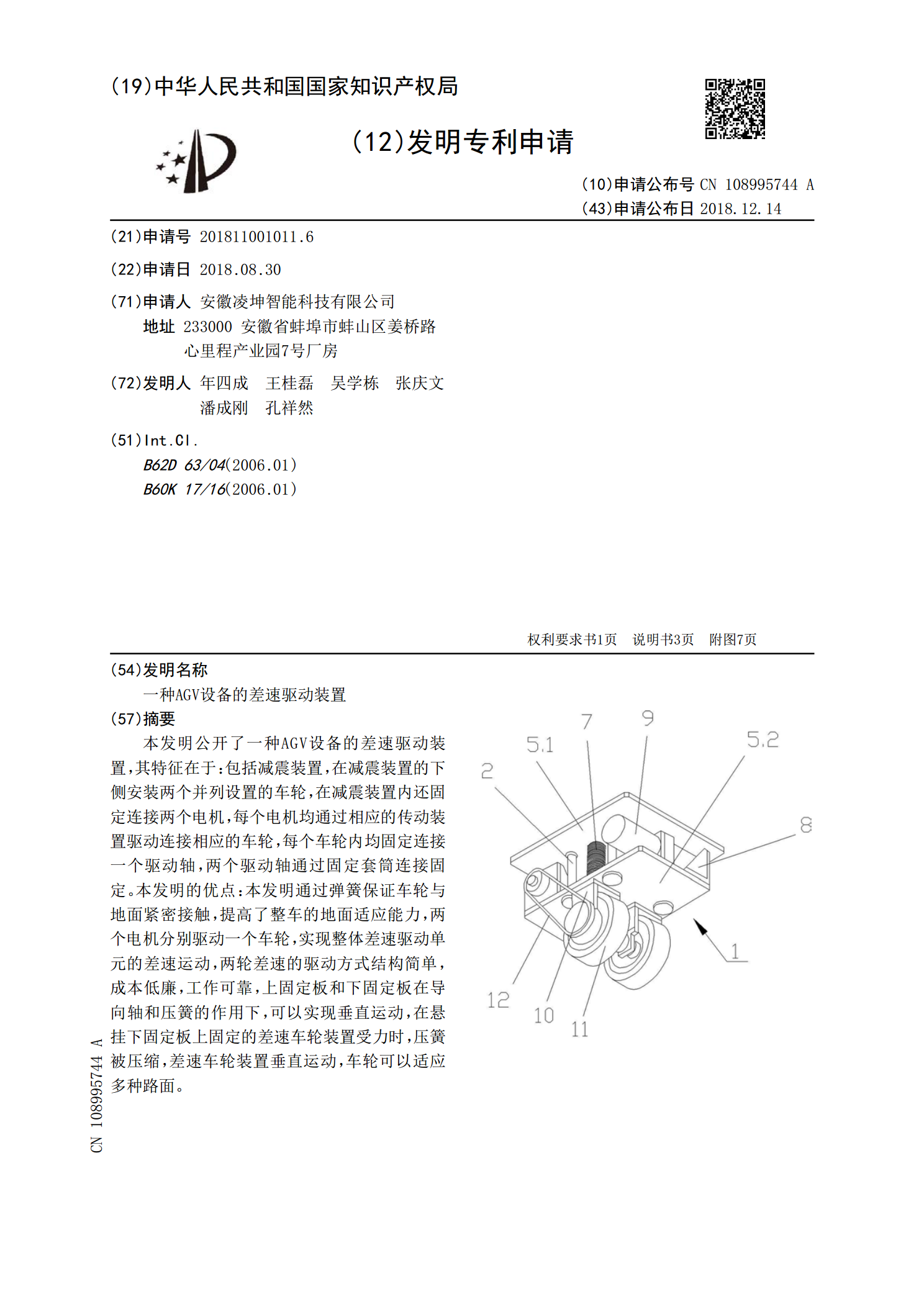
本发明公开了一种AGV设备的差速驱动装置,其特征在于:包括减震装置,在减震装置的下侧安装两个并列设置的车轮,在减震装置内还固定连接两个电机,每个电机均通过相应的传动装置驱动连接相应的车轮,每个车轮内均固定连接一个驱动轴,两个驱动轴通过固定套筒连接固定。本发明的优点:本发明通过弹簧保证车轮与地面紧密接触,提高了整车的地面适应能力,两个电机分别驱动一个车轮,实现整体差速驱动单元的差速运动,两轮差速的驱动方式结构简单,成本低廉,工作可靠,上固定板和下固定板在导向轴和压簧的作用下,可以实现垂直运动,在悬挂下固定板

全向差速驱动轮装置及AGV小车.pdf
本发明涉及物流搬运设备领域,尤其是涉及一种全向差速驱动轮装置及应用该装置的AGV小车;该装置包括:固定座、驱动装置、差速器、车轮和转向装置;差速器安装在固定座上,差速器的两输出端分别通过轮轴连接所述车轮;所述驱动装置与所述差速器连接,以提供动力;所述转向装置安装在固定座上,同时,所述转向装置与小车连接,以实现小车全向运动。本装置具有结构简单、成本低,控制难度低的优点。该小车包括上述的全向差速驱动轮装置,具备全向移动的功能,能够提高生产或者存储的效率。
电动汽车分布式驱动电子差速控制系统及方法.pdf
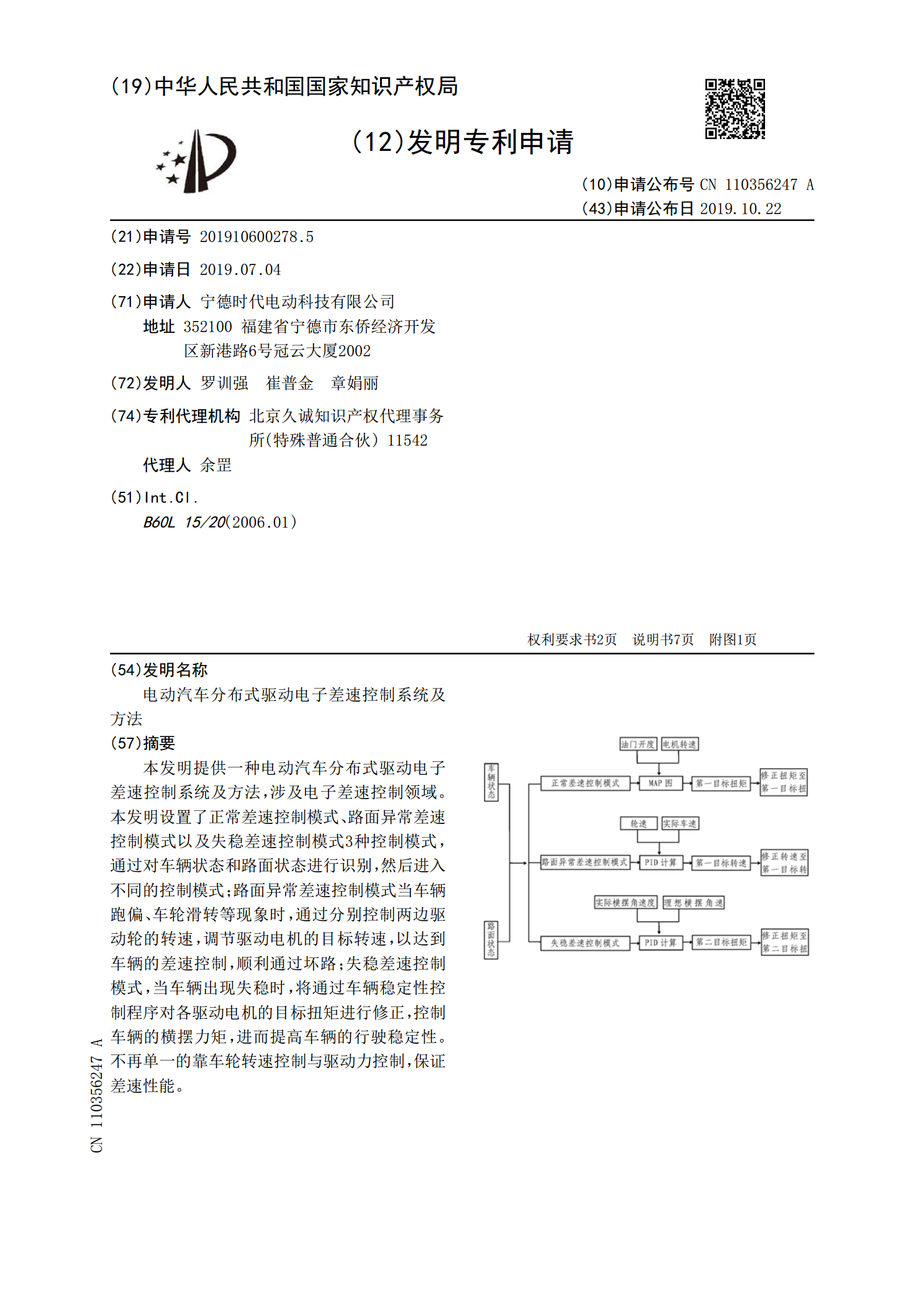
本发明提供一种电动汽车分布式驱动电子差速控制系统及方法,涉及电子差速控制领域。本发明设置了正常差速控制模式、路面异常差速控制模式以及失稳差速控制模式3种控制模式,通过对车辆状态和路面状态进行识别,然后进入不同的控制模式;路面异常差速控制模式当车辆跑偏、车轮滑转等现象时,通过分别控制两边驱动轮的转速,调节驱动电机的目标转速,以达到车辆的差速控制,顺利通过坏路;失稳差速控制模式,当车辆出现失稳时,将通过车辆稳定性控制程序对各驱动电机的目标扭矩进行修正,控制车辆的横摆力矩,进而提高车辆的行驶稳定性。不再单一的靠