
一种结合轮式移动机构的双足行走教育机器人.pdf

靖烟****魔王

1/7

2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种结合轮式移动机构的双足行走教育机器人.pdf
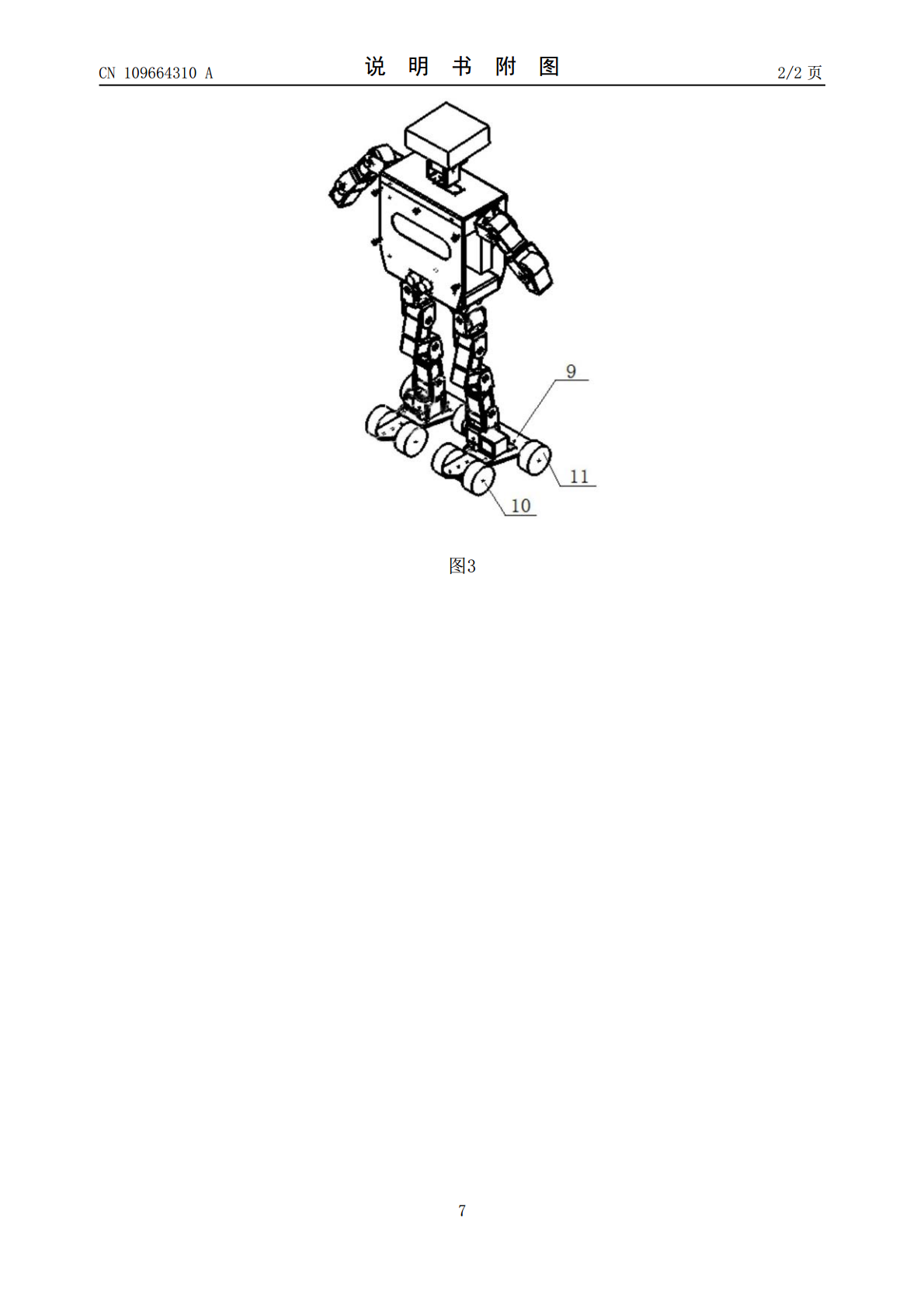
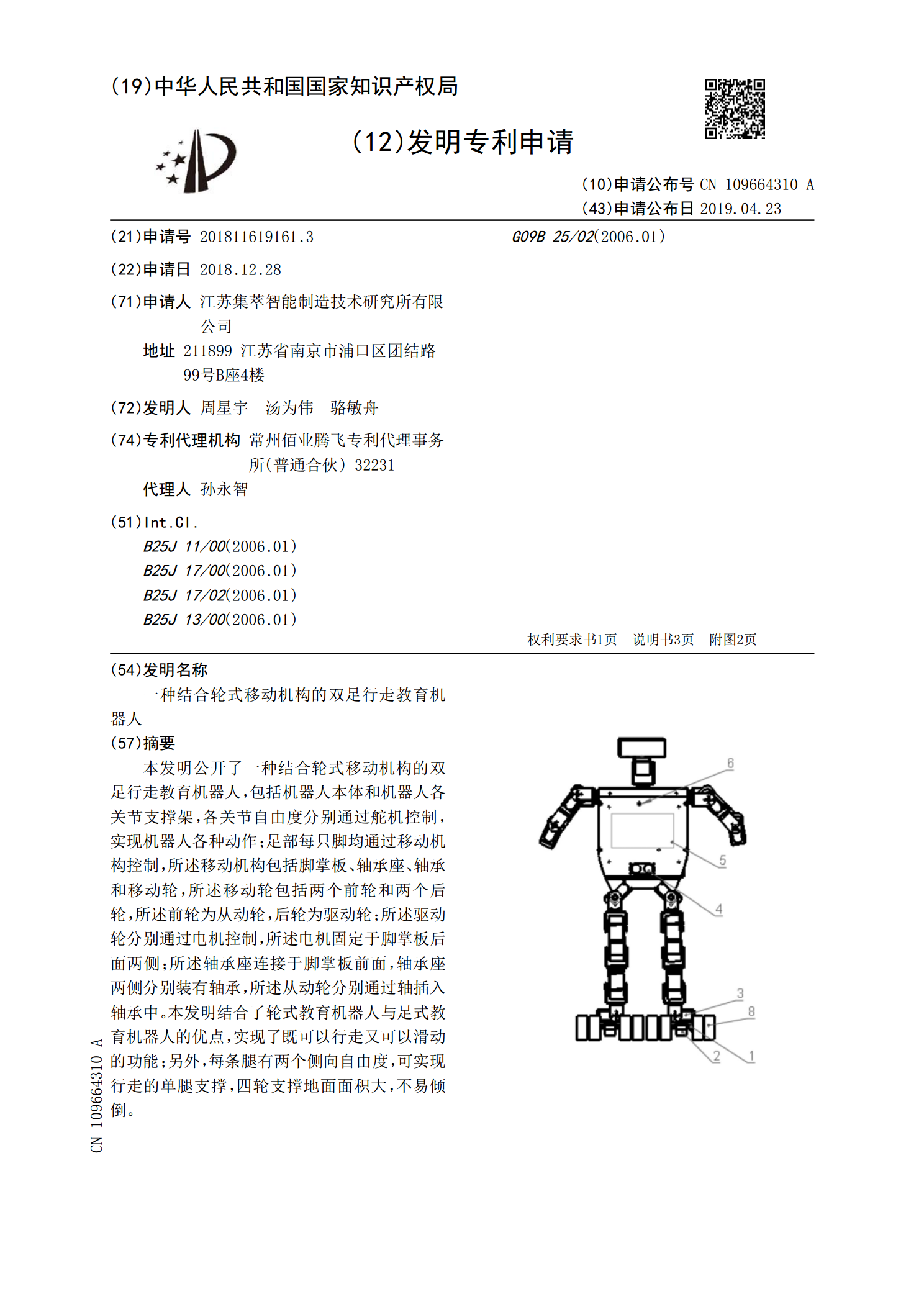
本发明公开了一种结合轮式移动机构的双足行走教育机器人,包括机器人本体和机器人各关节支撑架,各关节自由度分别通过舵机控制,实现机器人各种动作;足部每只脚均通过移动机构控制,所述移动机构包括脚掌板、轴承座、轴承和移动轮,所述移动轮包括两个前轮和两个后轮,所述前轮为从动轮,后轮为驱动轮;所述驱动轮分别通过电机控制,所述电机固定于脚掌板后面两侧;所述轴承座连接于脚掌板前面,轴承座两侧分别装有轴承,所述从动轮分别通过轴插入轴承中。本发明结合了轮式教育机器人与足式教育机器人的优点,实现了既可以行走又可以滑动的功能;另
一种具有双足步行与轮式移动转换功能的机器人运动机构.pdf
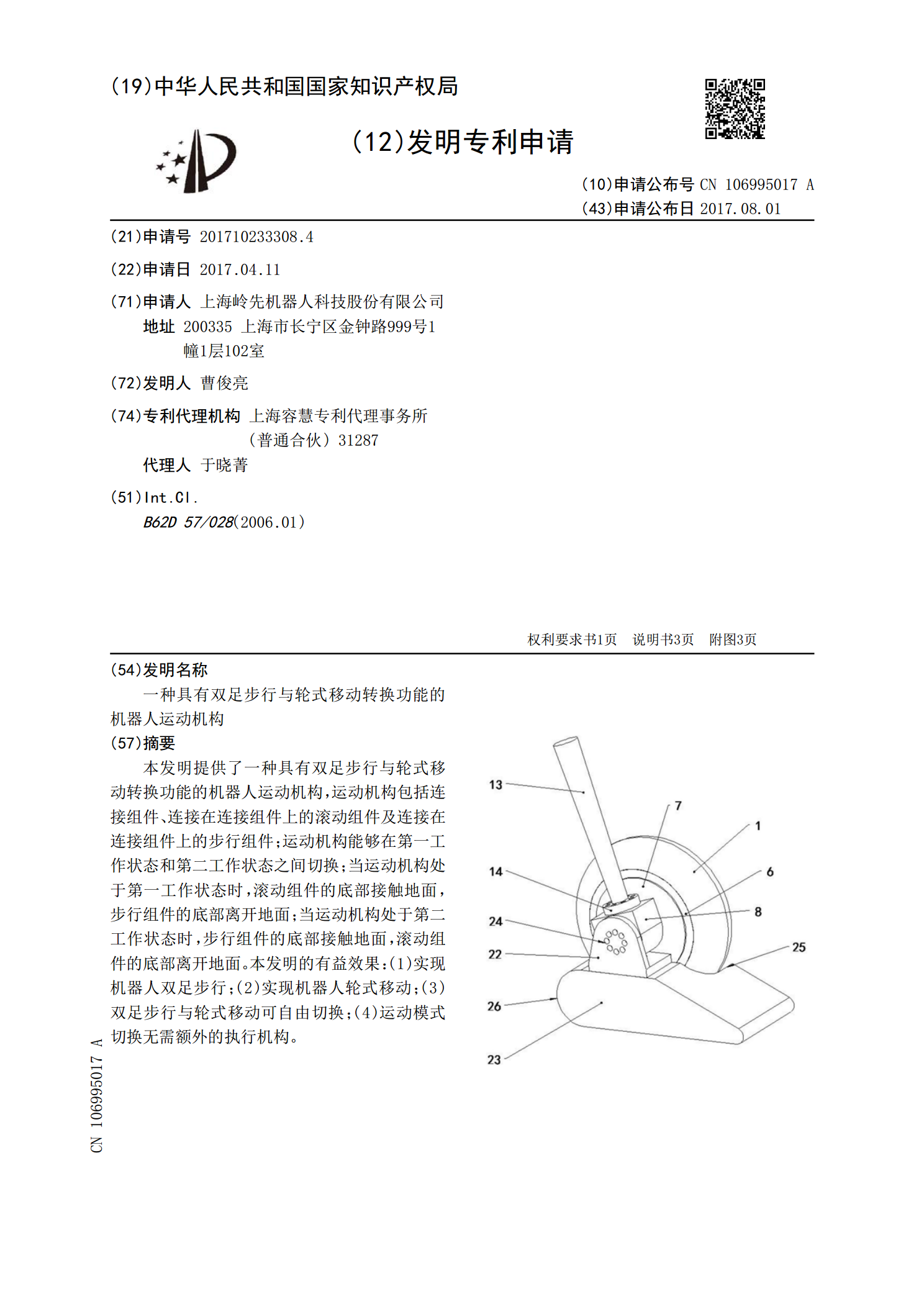
本发明提供了一种具有双足步行与轮式移动转换功能的机器人运动机构,运动机构包括连接组件、连接在连接组件上的滚动组件及连接在连接组件上的步行组件;运动机构能够在第一工作状态和第二工作状态之间切换;当运动机构处于第一工作状态时,滚动组件的底部接触地面,步行组件的底部离开地面;当运动机构处于第二工作状态时,步行组件的底部接触地面,滚动组件的底部离开地面。本发明的有益效果:(1)实现机器人双足步行;(2)实现机器人轮式移动;(3)双足步行与轮式移动可自由切换;(4)运动模式切换无需额外的执行机构。

一种弹性足与轮式运动机构结合的复合变形移动机器人.pdf
本发明提供一种弹性足与轮式运动机构结合的复合变形移动机器人,包括足-轮复合移动变形机器人的空间机体框架单元、主动轮驱动单元、从动轮随动单元、四条模块化腿单元、控制传感系统单元、密封壳体以及电源。该机器人用弹性足代替传统的刚性足,增加机器人的运动稳定性,减少机器人的震动性与冲击力,并与轮式移动方式复合,既能保证在平地上有轮式行进的快速移动性与高效率,又兼顾复杂山地环境、城市地型等复杂地形下,足式行进、匍匐爬行以及攀爬移动的优良机动性与强大越障功能,足轮复合变形移动机器人采用模块化设计,彼此之间互不干扰,便于

微型双足壁面行走机器人机构.pdf
一种微型双足壁面行走机器人机构,第二轴与机器人机架以第二转动副、第四转动副连接;第三齿轮通过第二离合器与第三轴连接;第三轴与机器人机架以第三转动副连接,并与第二行走吸附足以第二螺旋副连接;第一行走吸附足与机器人机架以第一圆柱副连接。本发明与现有技术相比,具有以下优点及突出性效果:该机器人机构通过行走吸附足与离合器之间的配合,可实现定轴轮系与行星轮系之间的变换,从而保证了工作状态时的稳定与较大的负载能力,且行走方式简单、驱动少。同时结构紧凑、尺寸小、成本低、重量轻、控制简单,负载力大,具有行走、越障等功能。

一种双足行走机器人.pdf
本发明涉及机器人技术领域,尤其是一种双足行走机器人,包括四边形框架,所述四边形框架内部设有动力传输机构,所述旋转电机的动力输出轴上固接有第四带轮,所述第四带轮通过皮带与固接在中间转轴上的第三带轮连接,中间转轴上同轴固接有两个第二带轮,两个第二带轮分别置于第三带轮两侧,每个连接板上均转动连接有一个竖直设置的支撑板,每个支撑板底端均固接有一个支撑脚,旋转电机上连接有plc控制器,所述plc控制器连接有自动避障模块、语音播报模块、无线控制模块。本装置结构简单,使用方便,制造成本很低,运动过程中能够通过自动避障模