
一种弹性足与轮式运动机构结合的复合变形移动机器人.pdf

慧红****ad

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种弹性足与轮式运动机构结合的复合变形移动机器人.pdf
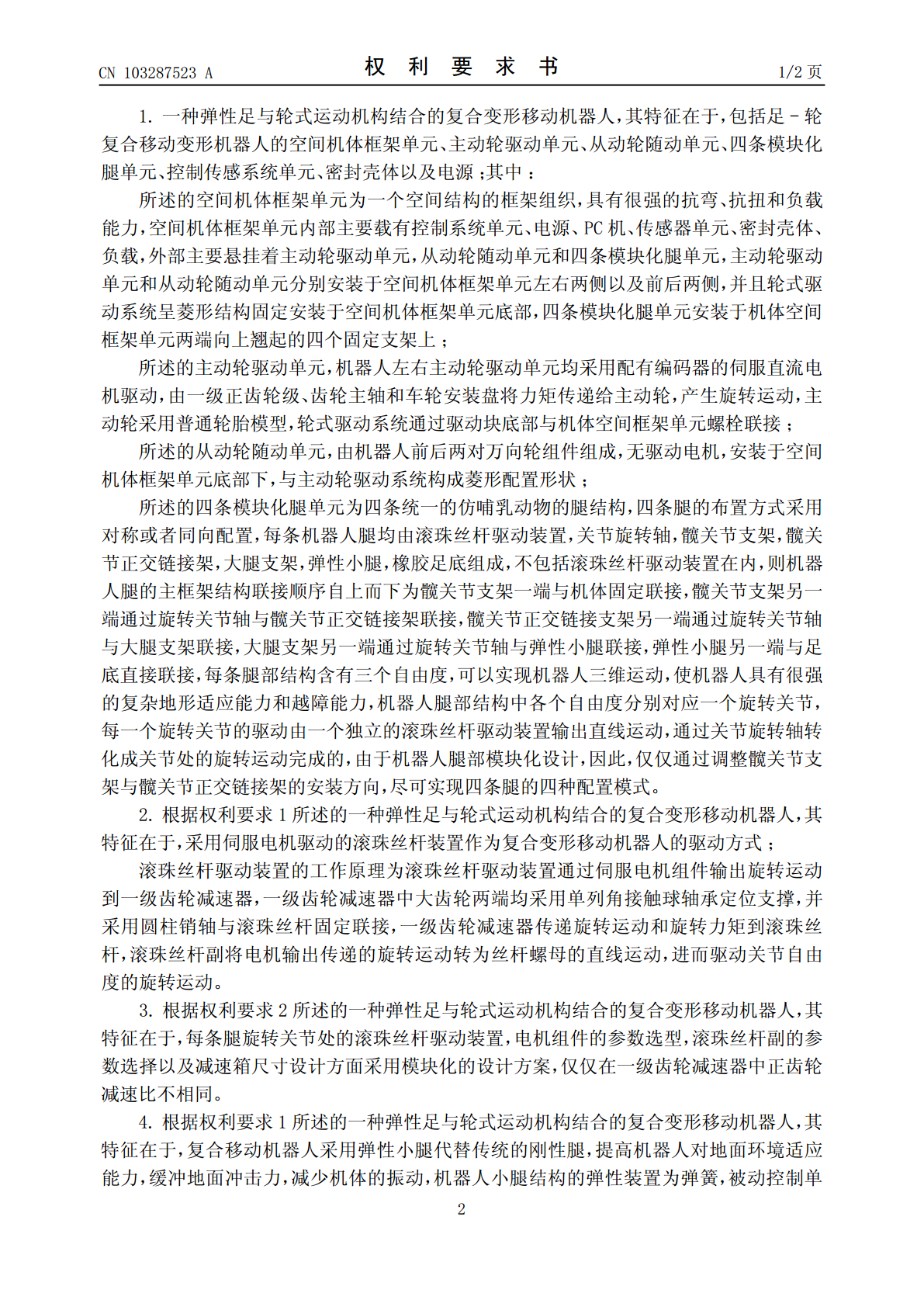
本发明提供一种弹性足与轮式运动机构结合的复合变形移动机器人,包括足-轮复合移动变形机器人的空间机体框架单元、主动轮驱动单元、从动轮随动单元、四条模块化腿单元、控制传感系统单元、密封壳体以及电源。该机器人用弹性足代替传统的刚性足,增加机器人的运动稳定性,减少机器人的震动性与冲击力,并与轮式移动方式复合,既能保证在平地上有轮式行进的快速移动性与高效率,又兼顾复杂山地环境、城市地型等复杂地形下,足式行进、匍匐爬行以及攀爬移动的优良机动性与强大越障功能,足轮复合变形移动机器人采用模块化设计,彼此之间互不干扰,便于
一种结合轮式移动机构的双足行走教育机器人.pdf
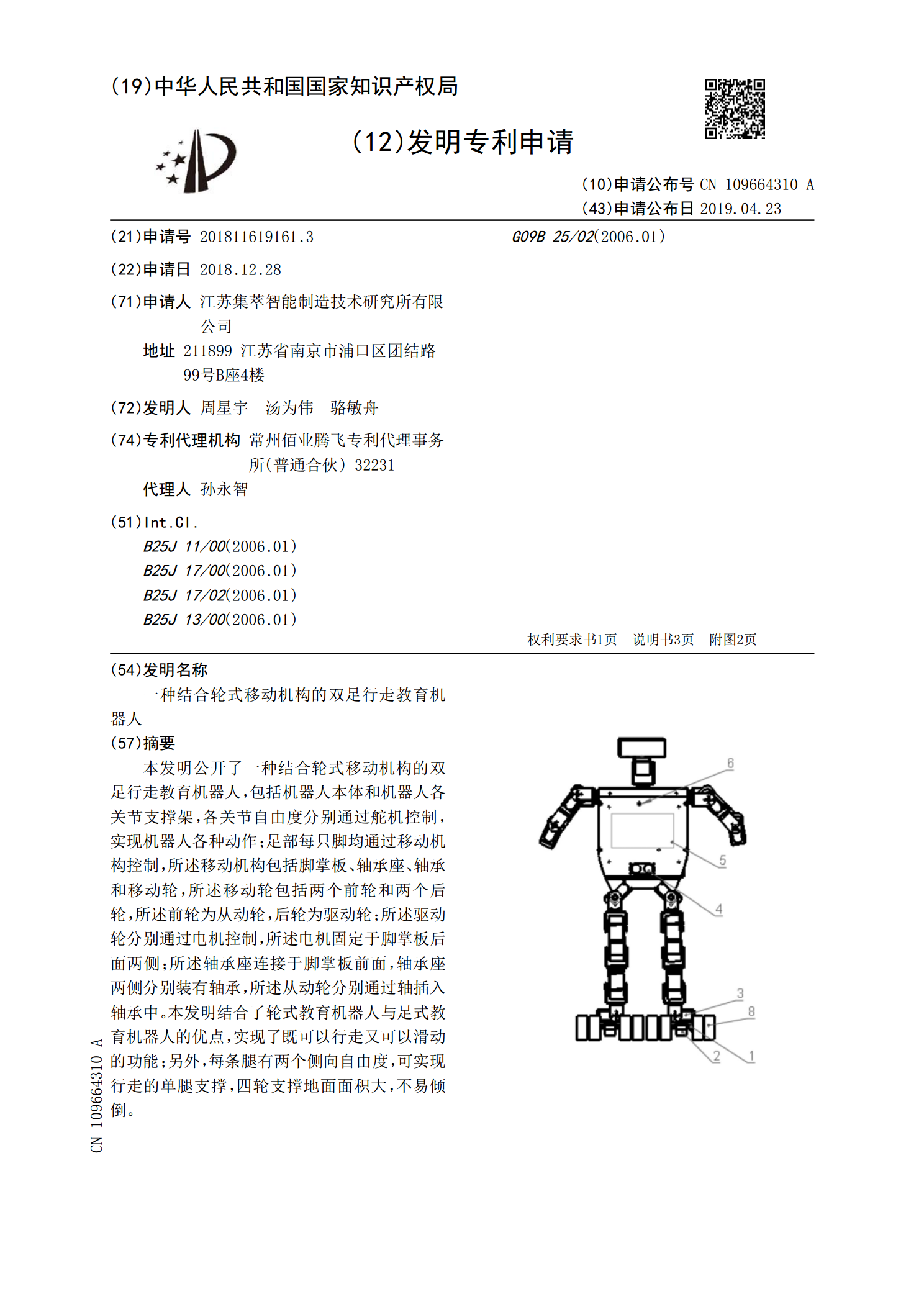
本发明公开了一种结合轮式移动机构的双足行走教育机器人,包括机器人本体和机器人各关节支撑架,各关节自由度分别通过舵机控制,实现机器人各种动作;足部每只脚均通过移动机构控制,所述移动机构包括脚掌板、轴承座、轴承和移动轮,所述移动轮包括两个前轮和两个后轮,所述前轮为从动轮,后轮为驱动轮;所述驱动轮分别通过电机控制,所述电机固定于脚掌板后面两侧;所述轴承座连接于脚掌板前面,轴承座两侧分别装有轴承,所述从动轮分别通过轴插入轴承中。本发明结合了轮式教育机器人与足式教育机器人的优点,实现了既可以行走又可以滑动的功能;另
一种四足轮式移动机器人.pdf
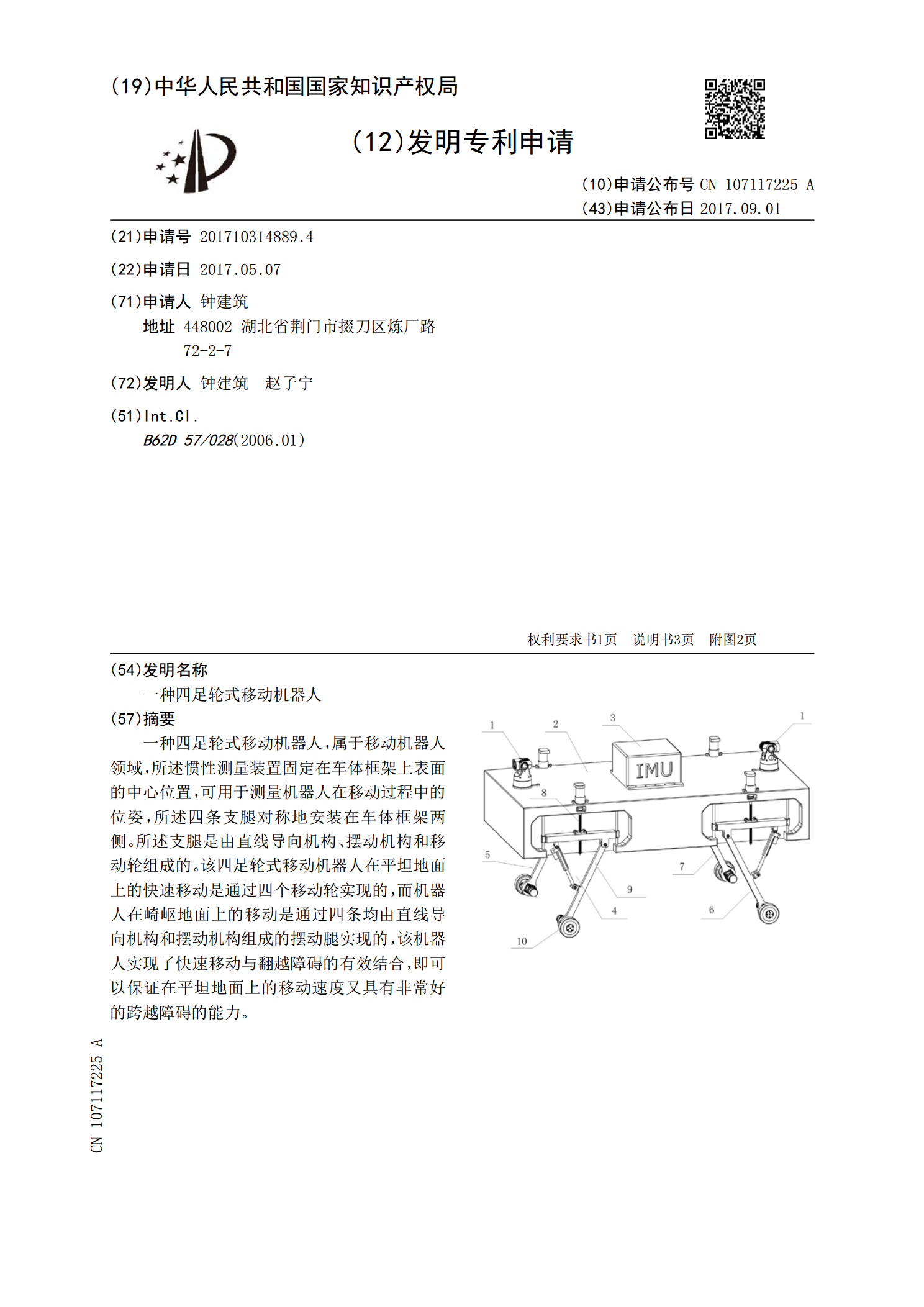
一种四足轮式移动机器人,属于移动机器人领域,所述惯性测量装置固定在车体框架上表面的中心位置,可用于测量机器人在移动过程中的位姿,所述四条支腿对称地安装在车体框架两侧。所述支腿是由直线导向机构、摆动机构和移动轮组成的。该四足轮式移动机器人在平坦地面上的快速移动是通过四个移动轮实现的,而机器人在崎岖地面上的移动是通过四条均由直线导向机构和摆动机构组成的摆动腿实现的,该机器人实现了快速移动与翻越障碍的有效结合,即可以保证在平坦地面上的移动速度又具有非常好的跨越障碍的能力。

考虑弹性变形的机构运动精度的仿真分析.docx
考虑弹性变形的机构运动精度的仿真分析一、引言随着工业制造技术的不断进步和机械加工技术的不断发展,数控技术已经成为现代制造业的一个重要组成部分。在机械切削加工中,工件和刀具之间的接触过程中会产生弹性变形,这种弹性变形将直接影响机床加工的精度和表面质量。因此,对于机床的弹性变形与精度的研究,是非常重要的。二、机构运动精度的影响因素在机械加工中,机床的精度与运动精度息息相关。而要保证机床的运动精度,需要考虑以下因素:1.机械结构的刚度及其稳定性机械结构的刚度及其稳定性是影响机床运动精度的一个重要因素。如果机床结

四杆机构与轮式复合移动机器人的研究的综述报告.docx
四杆机构与轮式复合移动机器人的研究的综述报告四杆机构是现代机械设计中一种常见的运动机构,它通过四个杆件相互连接,将旋转运动转换为直线运动或者平移运动。四杆机构广泛应用于机械制造、机械加工、自动化生产线等领域。最近,随着机器人技术的发展,四杆机构也被应用于轮式复合移动机器人中,成为了一种新的研究方向。轮式复合移动机器人是指具有轮式行走功能和其他移动功能,如机械臂挥动、抓取物体等的机器人。轮式复合移动机器人的运动学和动力学研究是该研究领域的重要方面。四杆机构在轮式复合移动机器人中的应用,不仅可以提高机器人的运