
微型双足壁面行走机器人机构.pdf

一条****彩妍


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

微型双足壁面行走机器人机构.pdf
一种微型双足壁面行走机器人机构,第二轴与机器人机架以第二转动副、第四转动副连接;第三齿轮通过第二离合器与第三轴连接;第三轴与机器人机架以第三转动副连接,并与第二行走吸附足以第二螺旋副连接;第一行走吸附足与机器人机架以第一圆柱副连接。本发明与现有技术相比,具有以下优点及突出性效果:该机器人机构通过行走吸附足与离合器之间的配合,可实现定轴轮系与行星轮系之间的变换,从而保证了工作状态时的稳定与较大的负载能力,且行走方式简单、驱动少。同时结构紧凑、尺寸小、成本低、重量轻、控制简单,负载力大,具有行走、越障等功能。
双足仿生机器人行走机构设计.pdf
未知驱动探索,专注成就专业双足仿生机器人行走机构设计1.引言双足仿生机器人是一种模仿人类步行方式的机器人,其行走机构的设计是实现机器人自主行走的关键。本文将介绍双足仿生机器人行走机构的设计原理、结构与控制方法。2.设计原理双足仿生机器人的行走机构设计基于人类步行的原理。人类步行是一种交替进行的两足动作,每步分为摆动相和支撑相。在摆动相中,一只脚离地,并向前摆动;在支撑相中,另一只脚着地支撑身体。机器人的行走机构需要模拟这一过程,通过控制各关节的运动实现机器人的步行。3.结构设计双足仿生机器人的行走机构包括
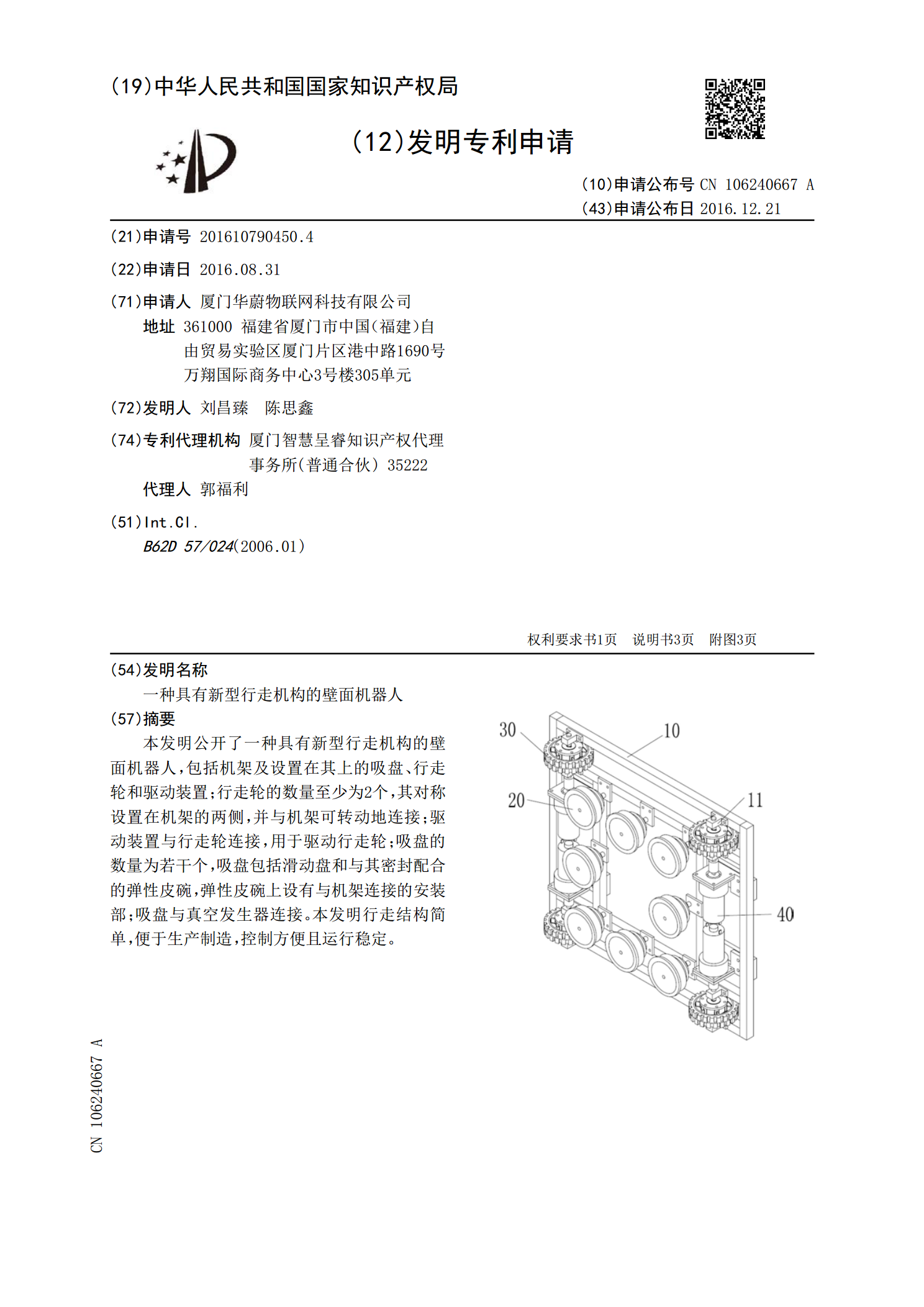
一种具有新型行走机构的壁面机器人.pdf
本发明公开了一种具有新型行走机构的壁面机器人,包括机架及设置在其上的吸盘、行走轮和驱动装置;行走轮的数量至少为2个,其对称设置在机架的两侧,并与机架可转动地连接;驱动装置与行走轮连接,用于驱动行走轮;吸盘的数量为若干个,吸盘包括滑动盘和与其密封配合的弹性皮碗,弹性皮碗上设有与机架连接的安装部;吸盘与真空发生器连接。本发明行走结构简单,便于生产制造,控制方便且运行稳定。

独轮双足行走机器人.pdf
本发明公开了一种独轮双足行走机器人,包括机体和安装在机体上的两条仿生腿,机体上还安装有轮腿,轮腿包括腿架和安装在腿架上的一个以上行走滚轮,腿架通过调节组件以能调节高度的方式安装在机体上。该独轮双足行走机器人具有运动灵活性好、适应能力强、适用范围广、结构简单紧凑、成本低廉等优点。

牵拉人工肌腱式双足机器人矢状面行走控制.docx
牵拉人工肌腱式双足机器人矢状面行走控制目录一、内容概括................................................2二、背景知识................................................31.双足机器人概述........................................42.人工肌腱技术介绍......................................53.矢状面行走简述................