
一种泊车控制装置.pdf

梅雪****67

1/8
2/8

3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种泊车控制装置.pdf
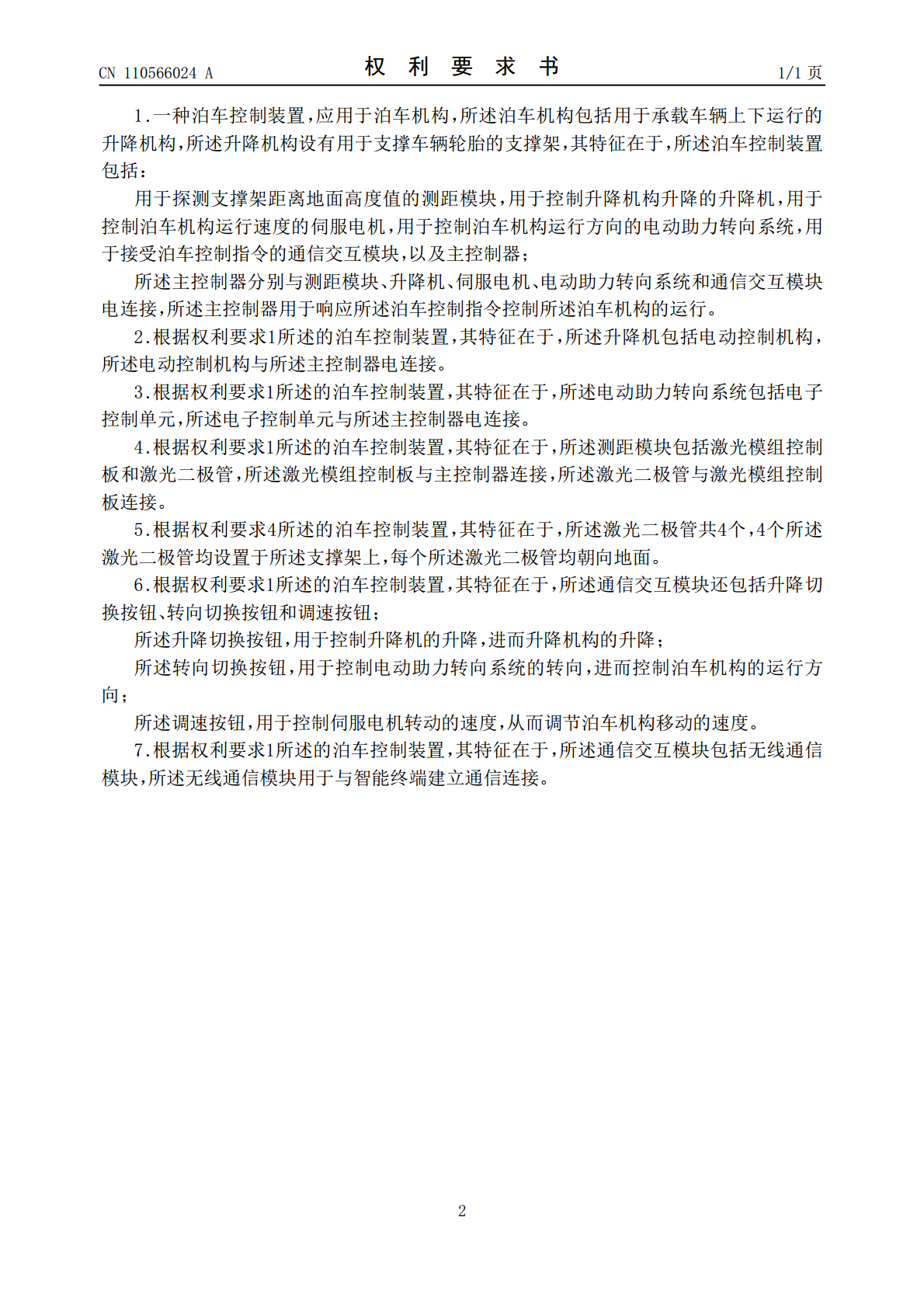
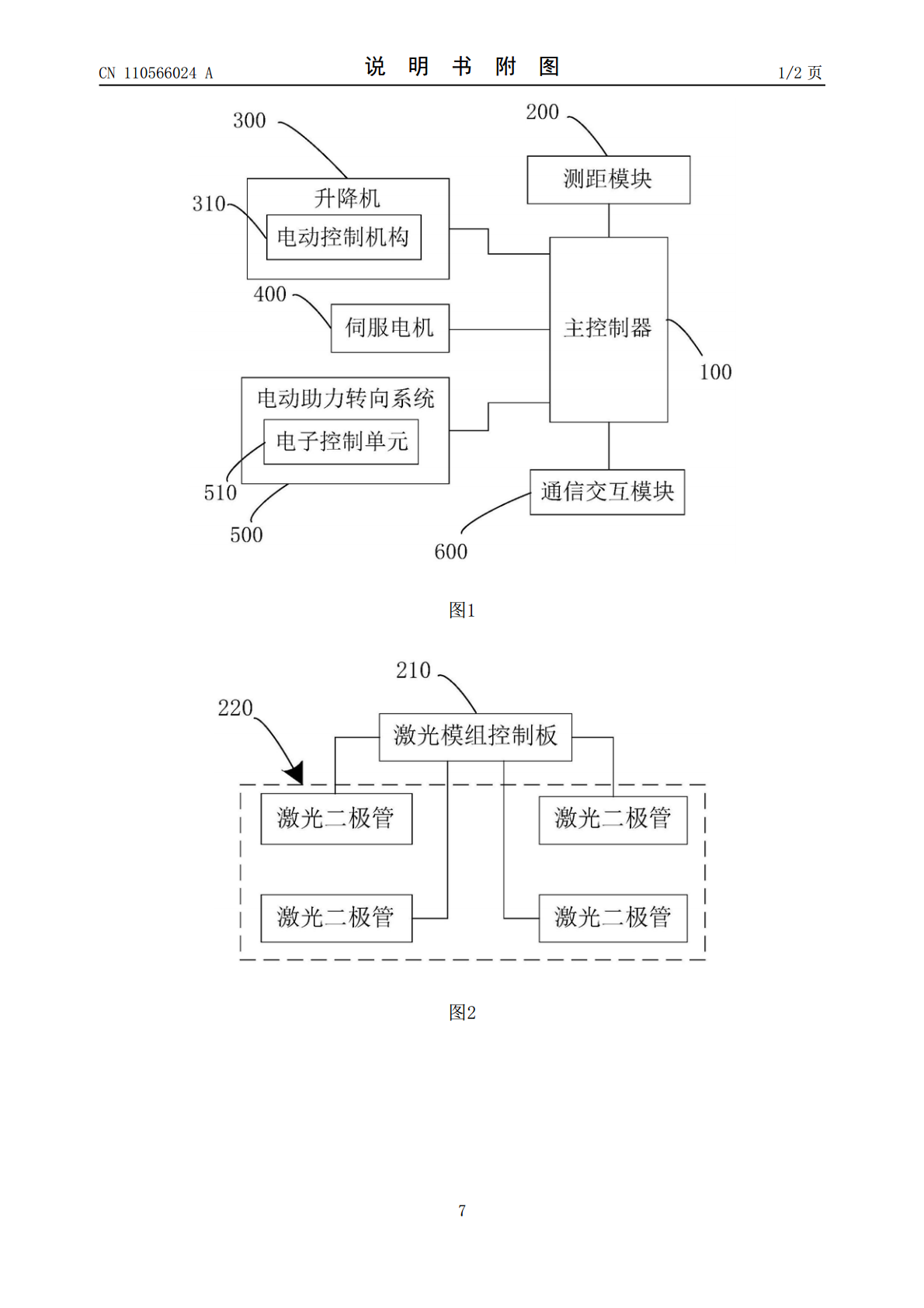
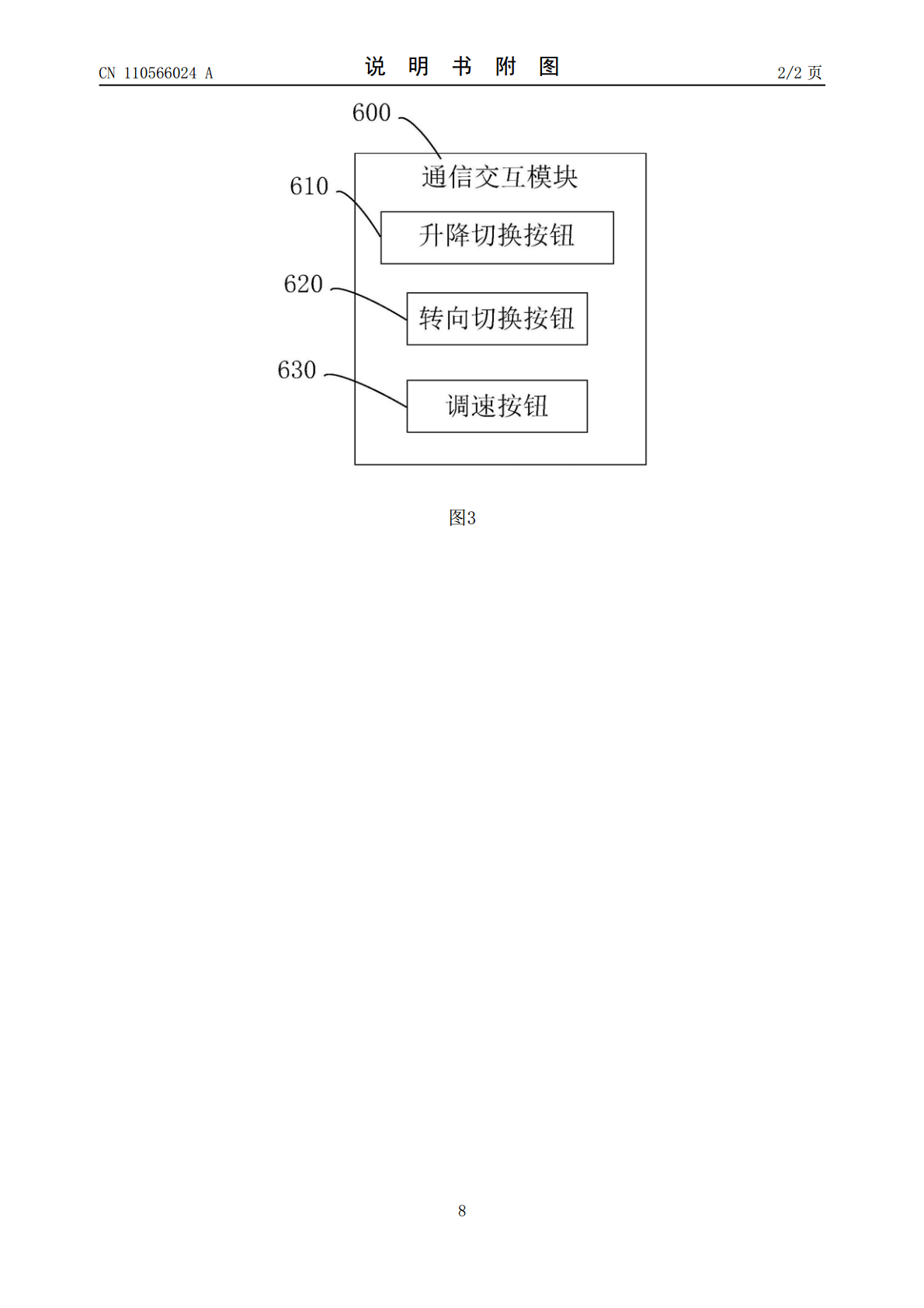
本发明涉及自动控制技术领域,具体涉及一种泊车控制装置,应用于泊车机构,所述泊车机构包括用于承载车辆上下运行的升降机构,所述升降机构设有用于支撑车辆轮胎的支撑架,所述泊车控制装置包括:测距模块,用于探测支撑架距离地面的高度值;升降机,用于控制升降机构的升降;伺服电机,用于控制泊车机构的运行速度;电动助力转向系统,用于控制泊车机构的运行方向;通信交互模块,用于接受泊车控制指令;主控制器,分别与测距模块、升降机、伺服电机、电动助力转向系统和通信交互模块电连接,用于响应所述泊车控制指令控制所述泊车机构的运行,本发

泊车控制装置与系统以及泊车控制方法.pdf
本发明公开了一种泊车控制装置与系统以及泊车控制方法,以解决现有技术中泊车控制时车辆运行轨迹与设计轨迹之间存在较大误差的问题。本发明的泊车控制装置包括:获取模块,用于获取车辆的起点位置和终点位置;计算模块,用于根据约束条件和所述起点位置和终点位置计算预设车速下的泊车轨迹,其中,所述约束条件包括泊车时车辆最高允许车速、车辆前轮最大转向速度和车辆前轮的最大转角,所述泊车轨迹曲率连续变化,其中包含圆弧以及与圆弧两端连接的曲线,所述圆弧的半径为车辆在前轮到达最大转角时的转弯半径。应用本发明的技术方案,有助于使泊车时

一种泊车控制方法、装置及系统.pdf
本发明公开了一种泊车控制方法、装置及系统,泊车控制方法包括:选择前轮最大转向角、后轮最大转向角中数值较小的转向角作为限值转向角;接收传感数据,根据传感数据确定期望转向角,判断期望转向角是否大于限值转向角;当期望转向角不大于限值转向角时,控制前轮、后轮的转向角为期望转向角,控制车辆从当前位置按照直线行驶至目标位置;当期望转向角大于限值转向角时,根据期望转向角确定直线期望行驶路径,基于限值转向角以及直线期望行驶路径确定若干目标点,控制车辆从当前位置按照折线行驶至目标位置,其中,折线的转折点包括每个目标点以及行

泊车收费控制装置.pdf
泊车收费控制装置,包括壳体和与壳体上面的凹槽相配的升降板,在壳体内设有与电源相接的电机,电机的输出轴连接有蜗杆,与蜗杆相配的蜗轮设置在限位器内,蜗轮的内孔与丝杆螺纹连接,丝杆自壳体上面向上伸出,丝杆的上端头与升降板相接;在壳体的一侧位于内部设有承压板,在承压板下方设有压力弹簧,压力弹簧下面与壳体的底面之间设有触发开关,在壳体内设有声波感应器和单片机,在升降板上面设有压力感应器,所述的触发开关、声波感应器、压力感应器、电机均与所述的单片机相接。具有省时省力,无需操作人员现场操控,整体结构简单,动作灵活可靠的
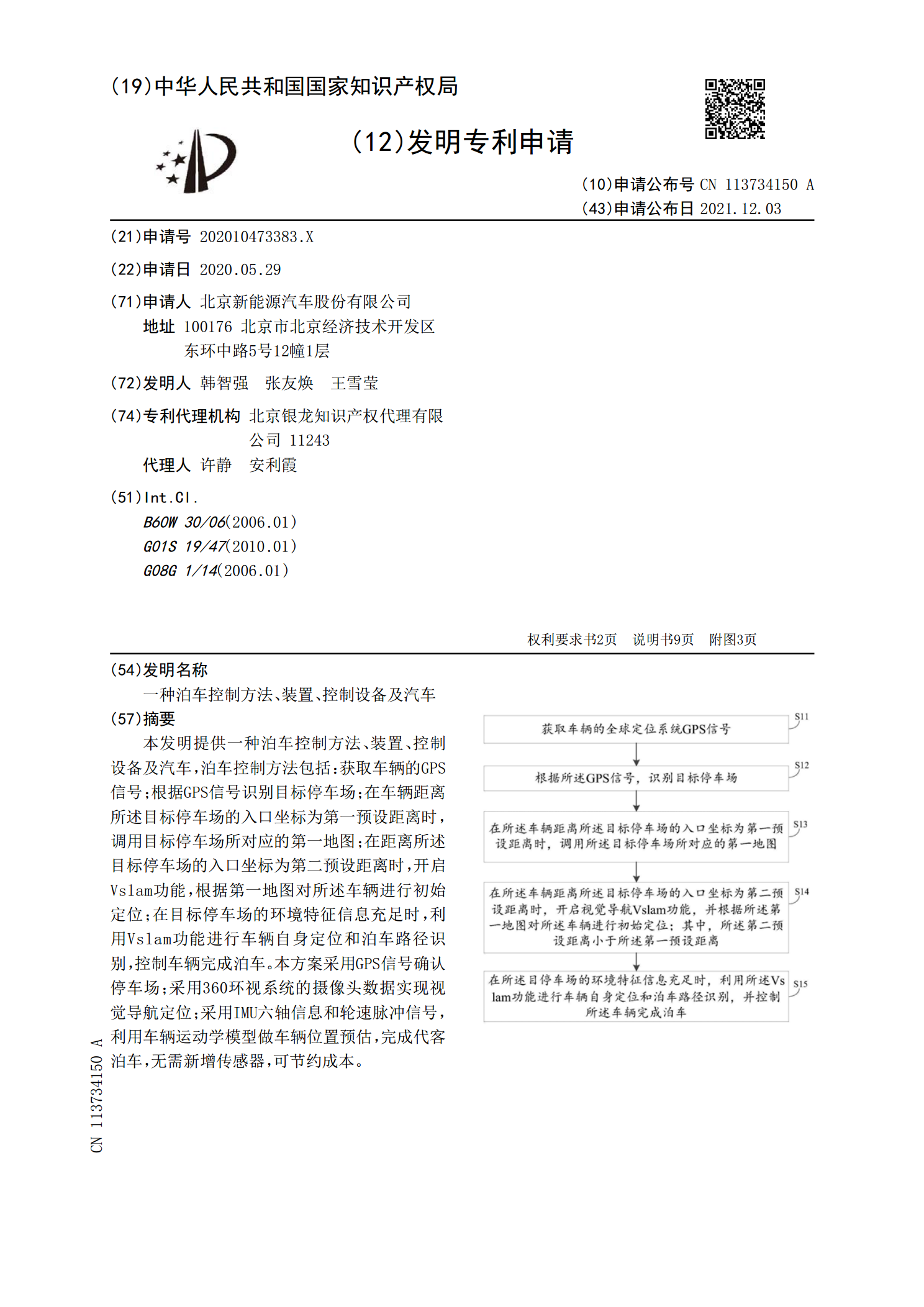
一种泊车控制方法、装置、控制设备及汽车.pdf
本发明提供一种泊车控制方法、装置、控制设备及汽车,泊车控制方法包括:获取车辆的GPS信号;根据GPS信号识别目标停车场;在车辆距离所述目标停车场的入口坐标为第一预设距离时,调用目标停车场所对应的第一地图;在距离所述目标停车场的入口坐标为第二预设距离时,开启Vslam功能,根据第一地图对所述车辆进行初始定位;在目标停车场的环境特征信息充足时,利用Vslam功能进行车辆自身定位和泊车路径识别,控制车辆完成泊车。本方案采用GPS信号确认停车场;采用360环视系统的摄像头数据实现视觉导航定位;采用IMU六轴信息和