
一种泊车控制方法、装置、控制设备及汽车.pdf

小代****回来


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种泊车控制方法、装置、控制设备及汽车.pdf
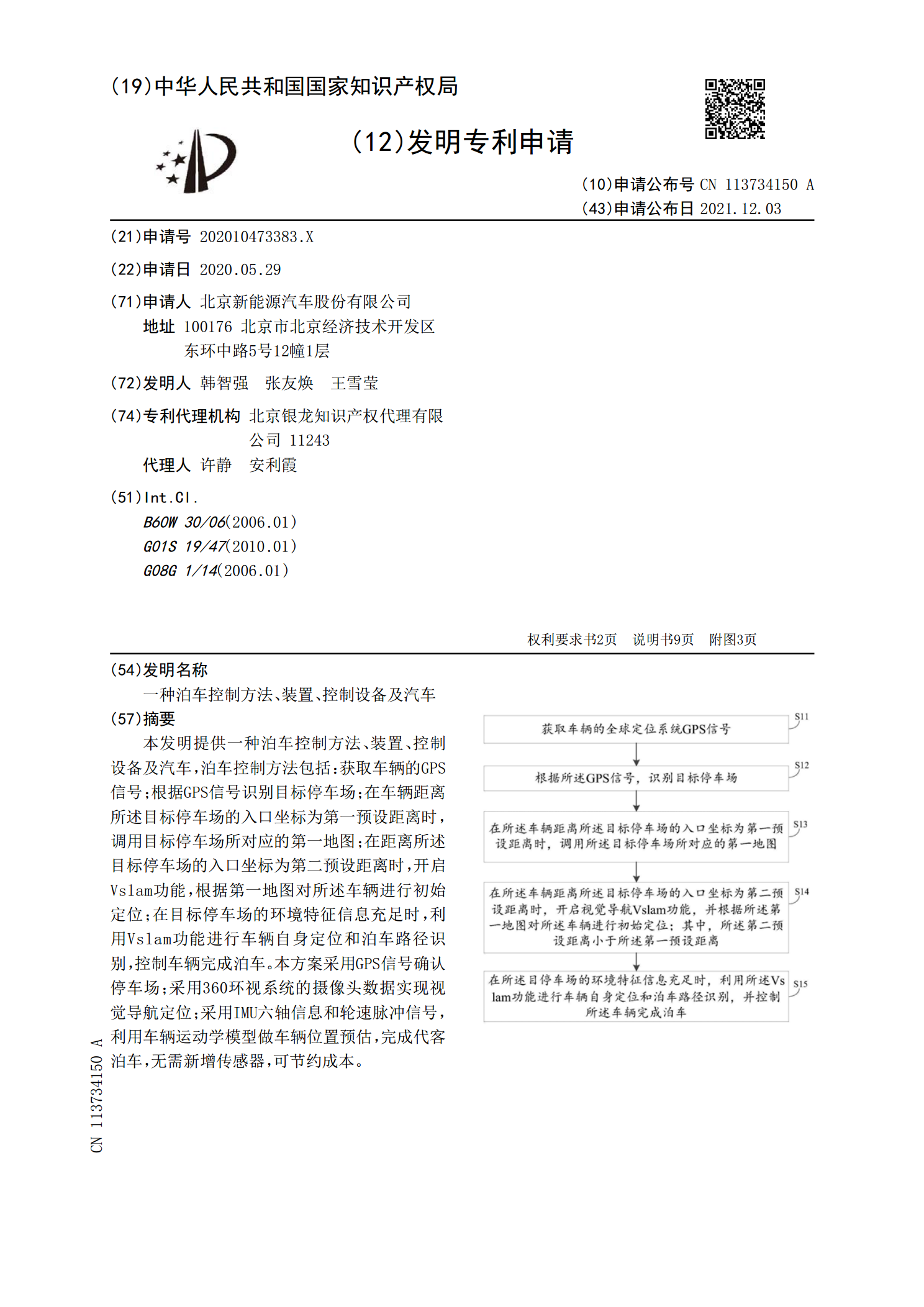
本发明提供一种泊车控制方法、装置、控制设备及汽车,泊车控制方法包括:获取车辆的GPS信号;根据GPS信号识别目标停车场;在车辆距离所述目标停车场的入口坐标为第一预设距离时,调用目标停车场所对应的第一地图;在距离所述目标停车场的入口坐标为第二预设距离时,开启Vslam功能,根据第一地图对所述车辆进行初始定位;在目标停车场的环境特征信息充足时,利用Vslam功能进行车辆自身定位和泊车路径识别,控制车辆完成泊车。本方案采用GPS信号确认停车场;采用360环视系统的摄像头数据实现视觉导航定位;采用IMU六轴信息和

泊车控制装置与系统以及泊车控制方法.pdf
本发明公开了一种泊车控制装置与系统以及泊车控制方法,以解决现有技术中泊车控制时车辆运行轨迹与设计轨迹之间存在较大误差的问题。本发明的泊车控制装置包括:获取模块,用于获取车辆的起点位置和终点位置;计算模块,用于根据约束条件和所述起点位置和终点位置计算预设车速下的泊车轨迹,其中,所述约束条件包括泊车时车辆最高允许车速、车辆前轮最大转向速度和车辆前轮的最大转角,所述泊车轨迹曲率连续变化,其中包含圆弧以及与圆弧两端连接的曲线,所述圆弧的半径为车辆在前轮到达最大转角时的转弯半径。应用本发明的技术方案,有助于使泊车时

一种自动泊车控制方法、装置及电动汽车.pdf
本发明公开了一种自动泊车控制方法、装置及电动汽车,涉及电动汽车技术领域,所述方法包括:接收自动泊车指令,获取车辆的工作状态为启动状态和档位信息为前进档时的转向灯信息,控制雷达的搜索方位;在车速小于或等于预设车速时,在搜索方位内,获取与车辆的当前位置相距大于或等于预设距离的目标泊车位,发送开始泊车指令,在车辆为刹车状态、档位信息为倒车档且方向盘控制信息为未控制时,获取雷达发送的车辆与障碍物的距离信息以及电动助力转向控制器发送的转向信息;获取目标转向角度并发送至电动助力转向控制器,发送控制指令并驱动电动助力转

一种泊车控制方法、装置及系统.pdf
本发明公开了一种泊车控制方法、装置及系统,泊车控制方法包括:选择前轮最大转向角、后轮最大转向角中数值较小的转向角作为限值转向角;接收传感数据,根据传感数据确定期望转向角,判断期望转向角是否大于限值转向角;当期望转向角不大于限值转向角时,控制前轮、后轮的转向角为期望转向角,控制车辆从当前位置按照直线行驶至目标位置;当期望转向角大于限值转向角时,根据期望转向角确定直线期望行驶路径,基于限值转向角以及直线期望行驶路径确定若干目标点,控制车辆从当前位置按照折线行驶至目标位置,其中,折线的转折点包括每个目标点以及行

一种代客泊车控制方法、装置、设备及车辆.pdf
本发明提供了一种代客泊车控制方法、装置、设备及车辆,该代客泊车控制方法包括:接收代客泊车模式指令;在根据所述代客泊车模式指令进入遍历搜车位模式时,启动多个车位探测设备分别进行不同类型的车位的检测;根据所述车位探测设备所检测到的车位与地图中的车位的匹配结果,确定目标车位;确定所述目标车位在车辆坐标系中的车位坐标;根据所述车位坐标,控制车辆行驶至所述目标车位。本方案可以将车位探测设备检测到的不同类型的车位与地图中的车位进行融合匹配,增加了车位的输入源,提升了车位搜索的合规性和准确性,提高了代客泊车的成功率。