
一种泊车控制方法、装置及系统.pdf

山梅****ai


1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

泊车控制装置与系统以及泊车控制方法.pdf
本发明公开了一种泊车控制装置与系统以及泊车控制方法,以解决现有技术中泊车控制时车辆运行轨迹与设计轨迹之间存在较大误差的问题。本发明的泊车控制装置包括:获取模块,用于获取车辆的起点位置和终点位置;计算模块,用于根据约束条件和所述起点位置和终点位置计算预设车速下的泊车轨迹,其中,所述约束条件包括泊车时车辆最高允许车速、车辆前轮最大转向速度和车辆前轮的最大转角,所述泊车轨迹曲率连续变化,其中包含圆弧以及与圆弧两端连接的曲线,所述圆弧的半径为车辆在前轮到达最大转角时的转弯半径。应用本发明的技术方案,有助于使泊车时

一种泊车控制方法、装置及系统.pdf
本发明公开了一种泊车控制方法、装置及系统,泊车控制方法包括:选择前轮最大转向角、后轮最大转向角中数值较小的转向角作为限值转向角;接收传感数据,根据传感数据确定期望转向角,判断期望转向角是否大于限值转向角;当期望转向角不大于限值转向角时,控制前轮、后轮的转向角为期望转向角,控制车辆从当前位置按照直线行驶至目标位置;当期望转向角大于限值转向角时,根据期望转向角确定直线期望行驶路径,基于限值转向角以及直线期望行驶路径确定若干目标点,控制车辆从当前位置按照折线行驶至目标位置,其中,折线的转折点包括每个目标点以及行
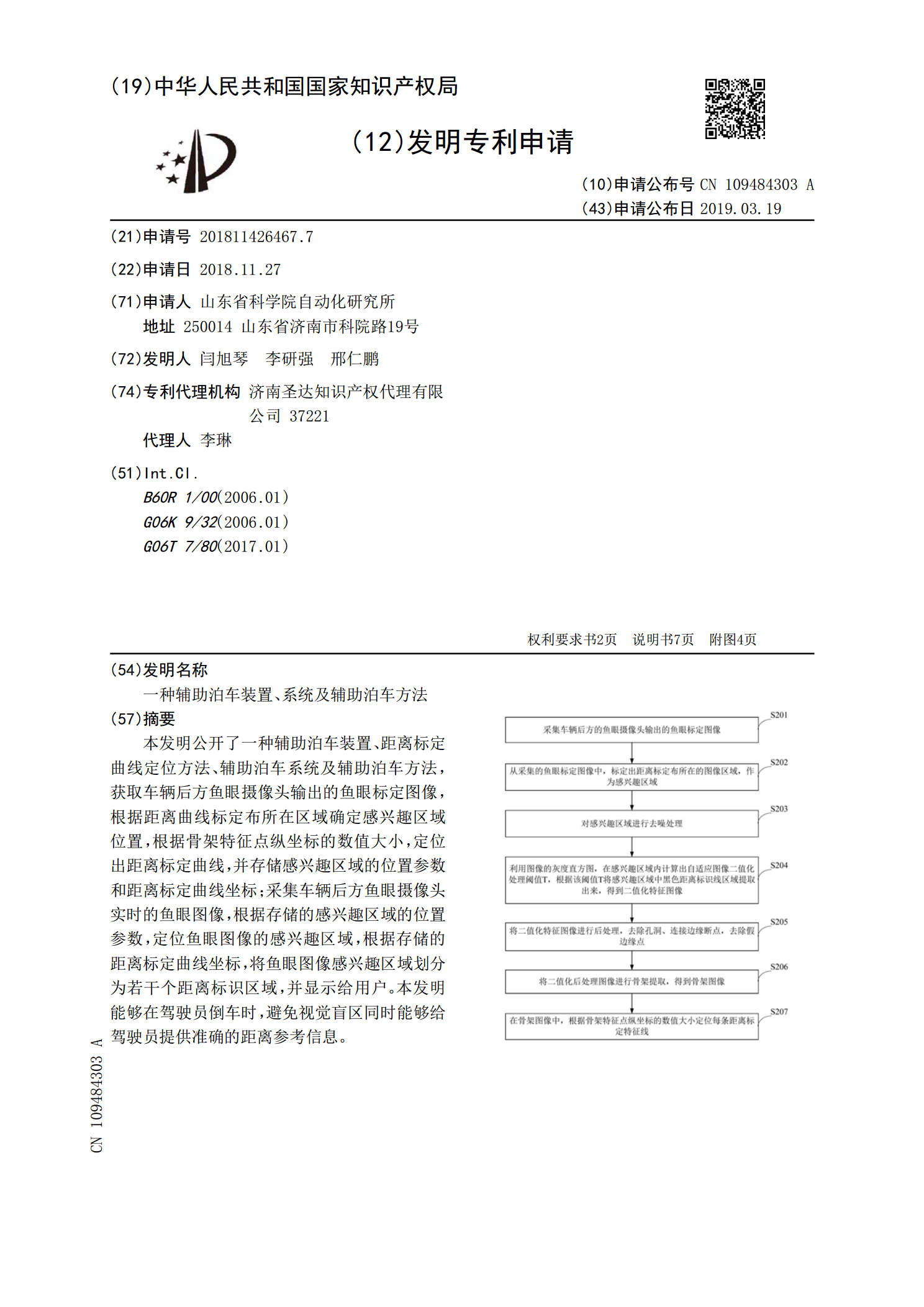
一种辅助泊车装置、系统及辅助泊车方法.pdf
本发明公开了一种辅助泊车装置、距离标定曲线定位方法、辅助泊车系统及辅助泊车方法,获取车辆后方鱼眼摄像头输出的鱼眼标定图像,根据距离曲线标定布所在区域确定感兴趣区域位置,根据骨架特征点纵坐标的数值大小,定位出距离标定曲线,并存储感兴趣区域的位置参数和距离标定曲线坐标;采集车辆后方鱼眼摄像头实时的鱼眼图像,根据存储的感兴趣区域的位置参数,定位鱼眼图像的感兴趣区域,根据存储的距离标定曲线坐标,将鱼眼图像感兴趣区域划分为若干个距离标识区域,并显示给用户。本发明能够在驾驶员倒车时,避免视觉盲区同时能够给驾驶员提供准
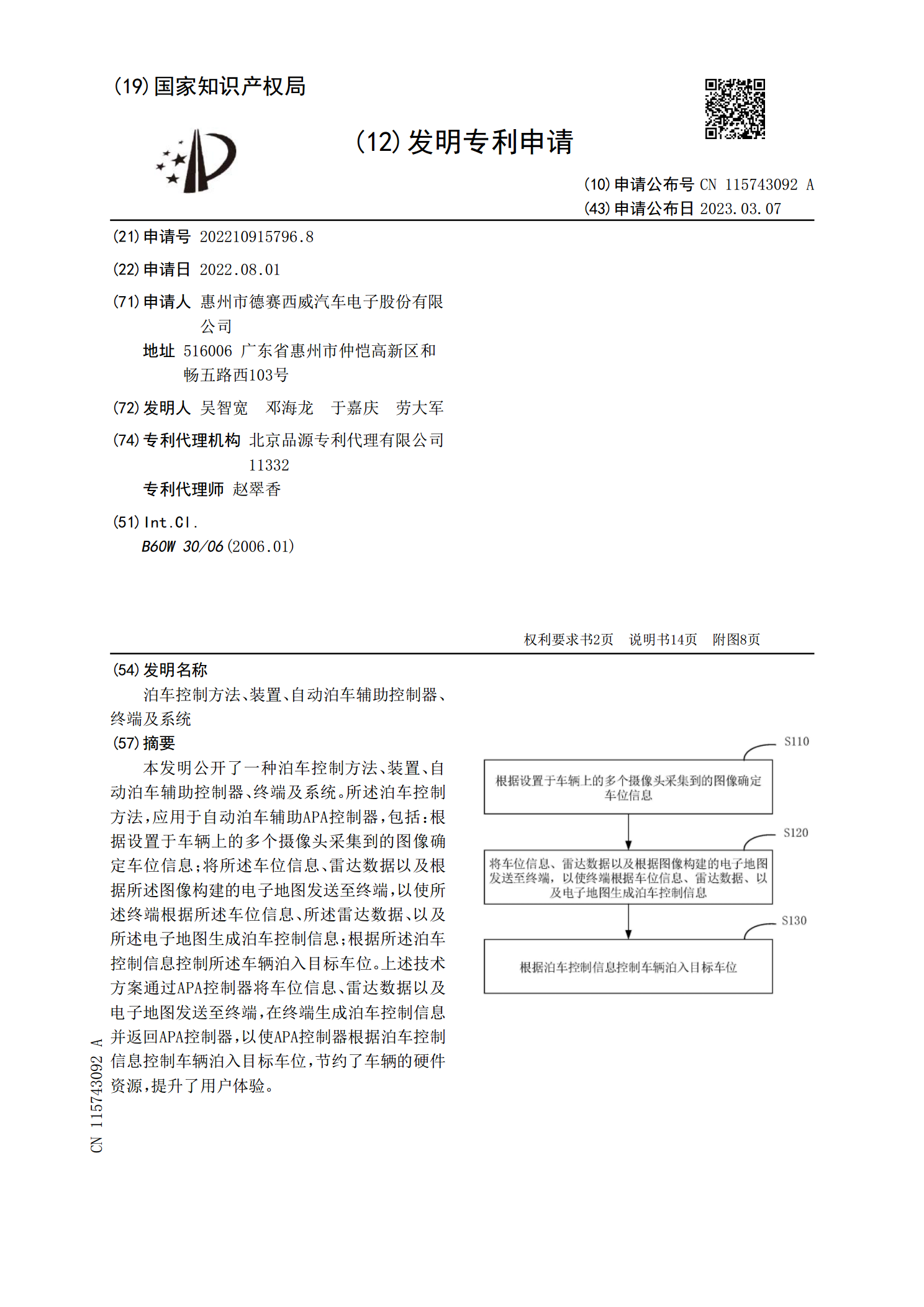
泊车控制方法、装置、自动泊车辅助控制器、终端及系统.pdf
本发明公开了一种泊车控制方法、装置、自动泊车辅助控制器、终端及系统。所述泊车控制方法,应用于自动泊车辅助APA控制器,包括:根据设置于车辆上的多个摄像头采集到的图像确定车位信息;将所述车位信息、雷达数据以及根据所述图像构建的电子地图发送至终端,以使所述终端根据所述车位信息、所述雷达数据、以及所述电子地图生成泊车控制信息;根据所述泊车控制信息控制所述车辆泊入目标车位。上述技术方案通过APA控制器将车位信息、雷达数据以及电子地图发送至终端,在终端生成泊车控制信息并返回APA控制器,以使APA控制器根据泊车控制
车辆控制方法、装置和泊车辅助系统.pdf
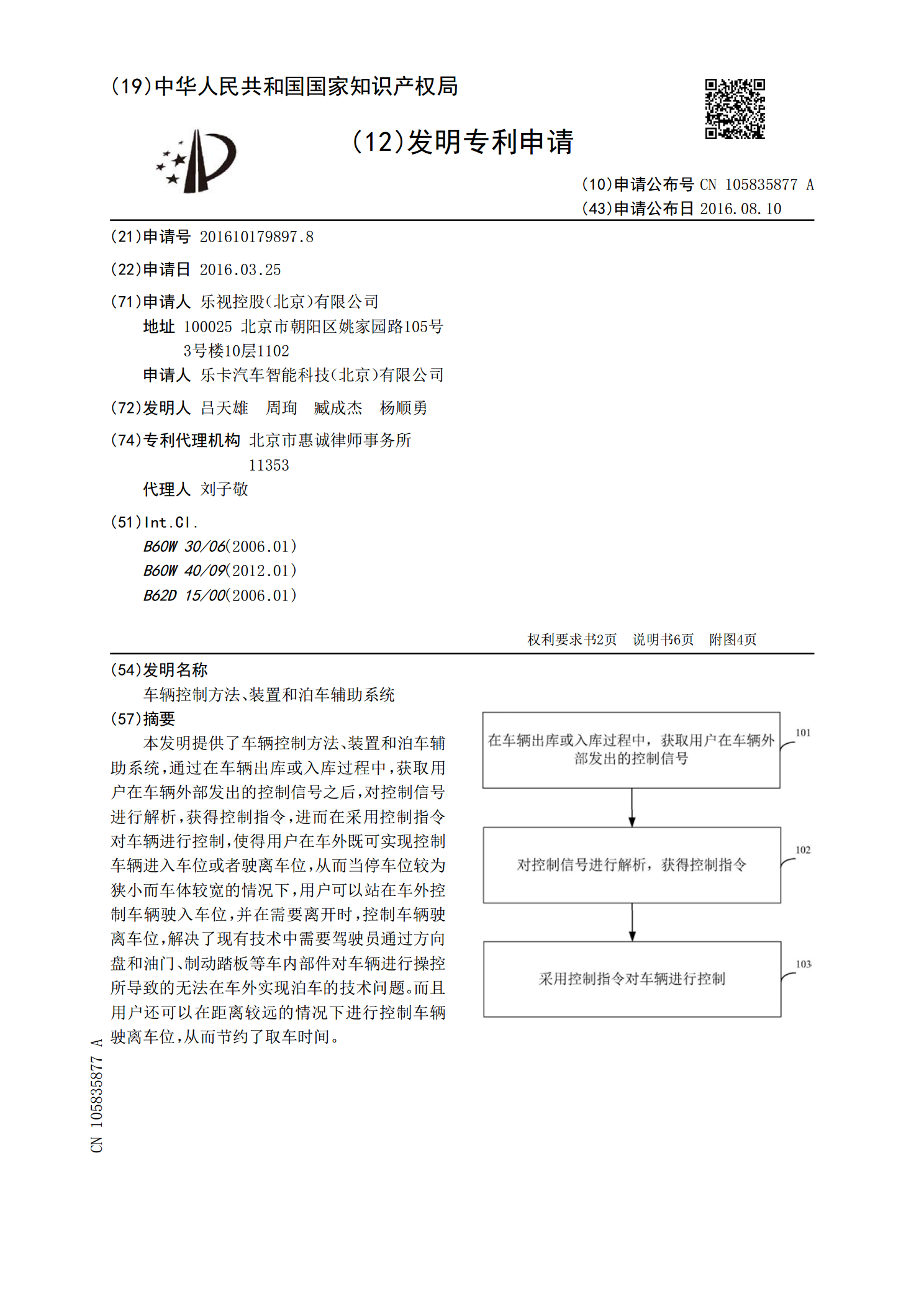
本发明提供了车辆控制方法、装置和泊车辅助系统,通过在车辆出库或入库过程中,获取用户在车辆外部发出的控制信号之后,对控制信号进行解析,获得控制指令,进而在采用控制指令对车辆进行控制,使得用户在车外既可实现控制车辆进入车位或者驶离车位,从而当停车位较为狭小而车体较宽的情况下,用户可以站在车外控制车辆驶入车位,并在需要离开时,控制车辆驶离车位,解决了现有技术中需要驾驶员通过方向盘和油门、制动踏板等车内部件对车辆进行操控所导致的无法在车外实现泊车的技术问题。而且用户还可以在距离较远的情况下进行控制车辆驶离车位,从