
一种AGV举升系统及举升式AGV.pdf

Ch****75


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种AGV举升系统及举升式AGV.pdf
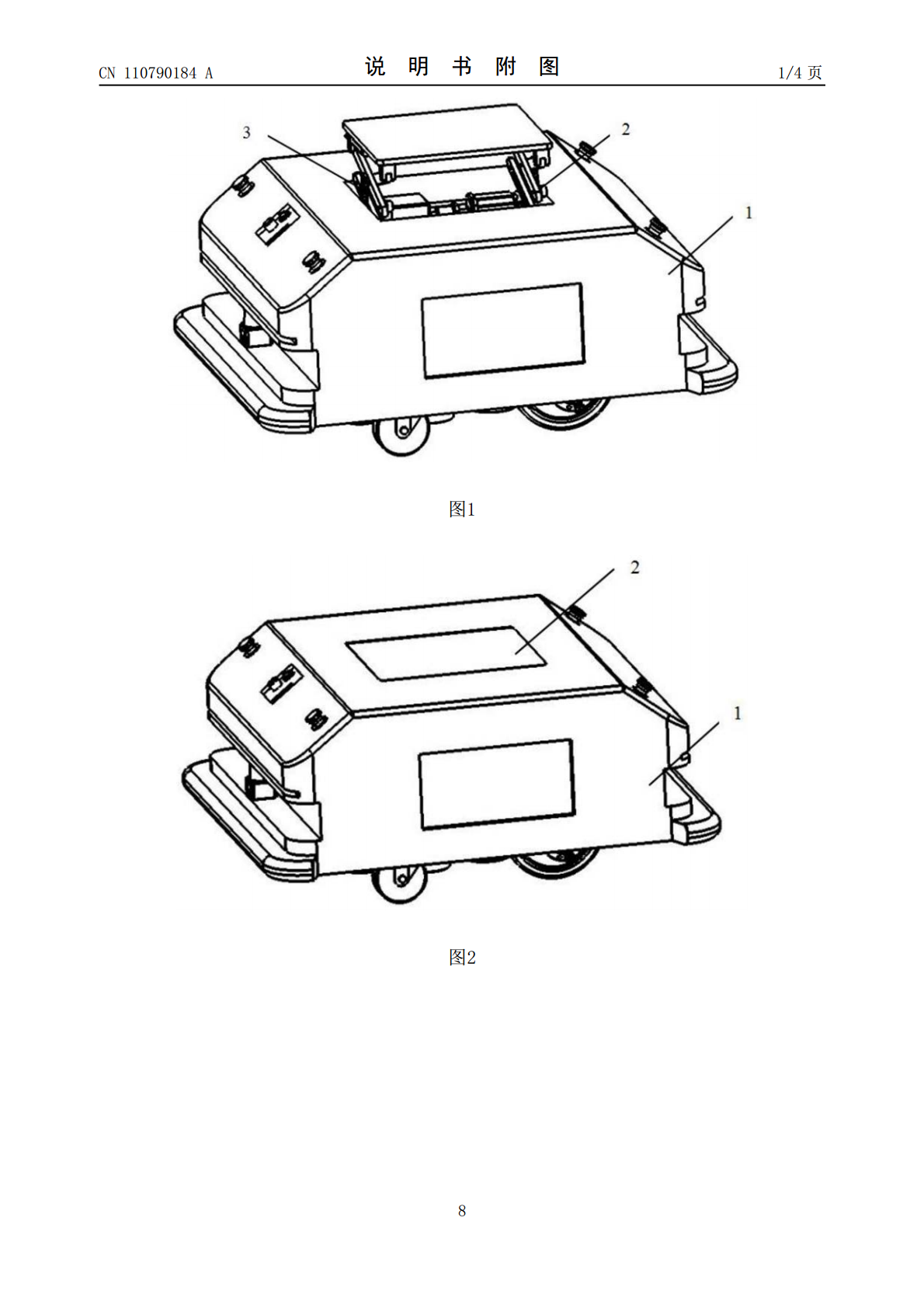
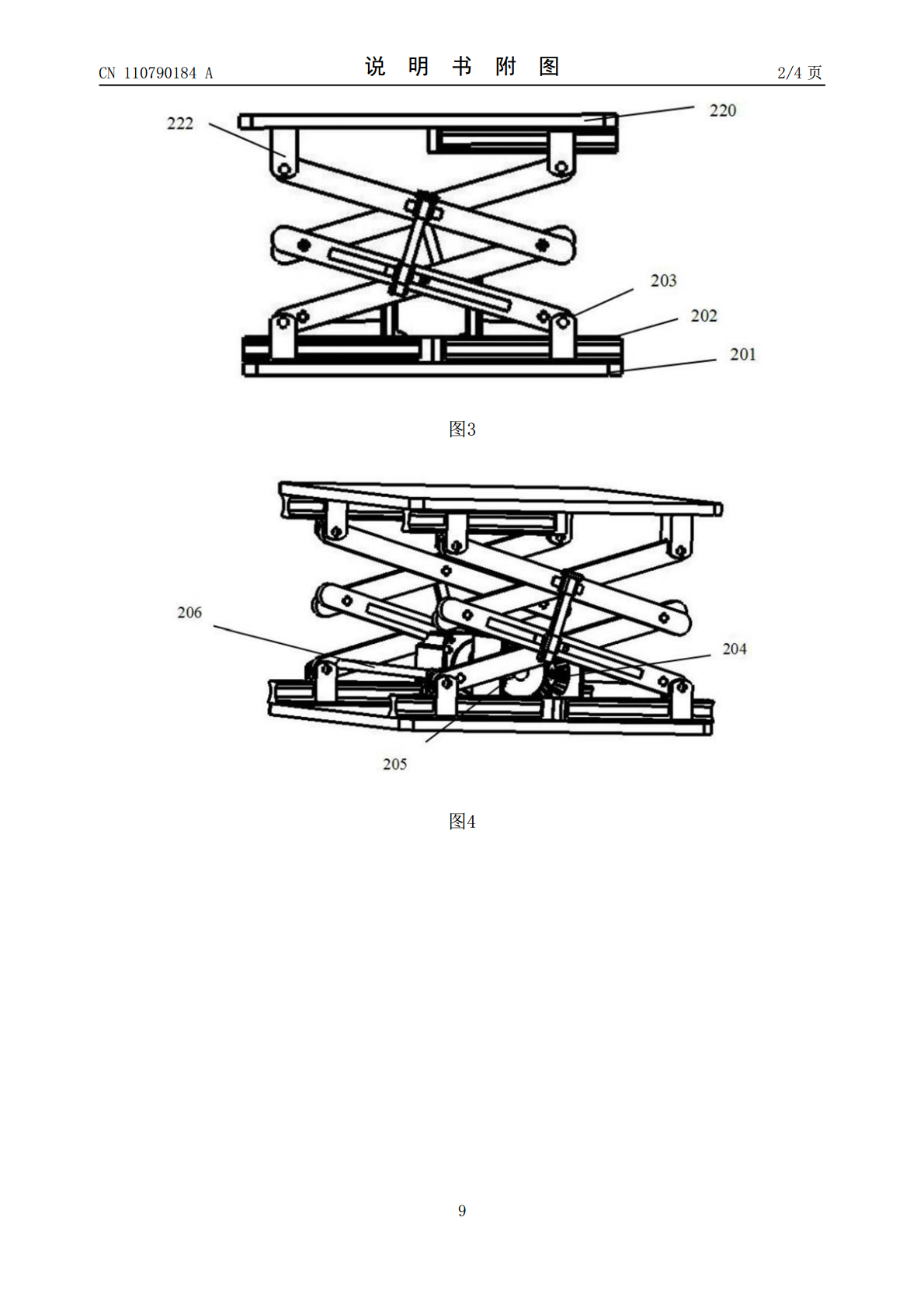
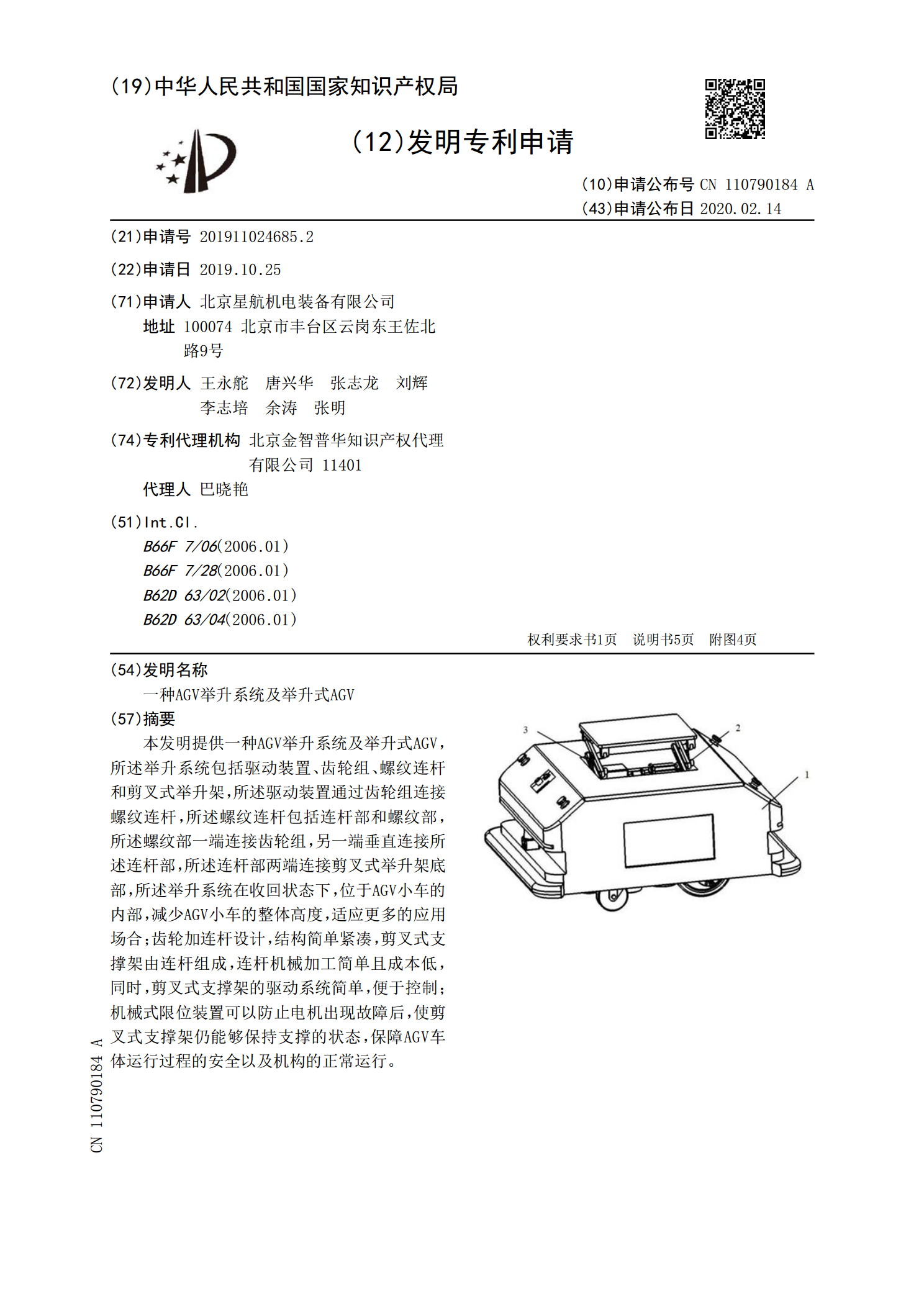
本发明提供一种AGV举升系统及举升式AGV,所述举升系统包括驱动装置、齿轮组、螺纹连杆和剪叉式举升架,所述驱动装置通过齿轮组连接螺纹连杆,所述螺纹连杆包括连杆部和螺纹部,所述螺纹部一端连接齿轮组,另一端垂直连接所述连杆部,所述连杆部两端连接剪叉式举升架底部,所述举升系统在收回状态下,位于AGV小车的内部,减少AGV小车的整体高度,适应更多的应用场合;齿轮加连杆设计,结构简单紧凑,剪叉式支撑架由连杆组成,连杆机械加工简单且成本低,同时,剪叉式支撑架的驱动系统简单,便于控制;机械式限位装置可以防止电机出现故障

一种举升式AGV.pdf
本发明公开了一种举升式AGV,其包括AGV车体和设于AGV车体上的举升机构,AGV车体的底部设有两个呈对角设置的驱动舵轮。本发明通过在AGV车体的底部设置两个呈对角设置的驱动舵轮,向前或向后行驶时,这两个驱动舵轮提供举升式AGV行驶的驱动力,转向时,在所提供的电力一定的情况下,呈对角设置的驱动舵轮作用于整个举升式AGV的转向驱动力矩可以达到最大,举升式AGV便可轻便、灵活地全方位转向,实现全向行驶。

一种重载举升式AGV小车.pdf
本发明公开一种重载举升式AGV小车;磁条铺设于地面,磁导航传感器安装于车架上,磁导航传感器输送采样信号至工业无线移动通讯模块,工业无线移动通讯模块安装在车架上并控制浮动式舵轮机构沿磁条驱动,万向脚轮安装在车架底部支撑车架;升降机安装在车架中,而工作台安装在升降机上;电池安装在车架上分别为磁导航传感器、浮动式舵轮机构、工业无线移动通讯模块及升降机供电,而工业无线移动通讯模块分别与磁导航传感器、浮动式舵轮机构及升降机电连接并由中央调度系统控制其工作。本发明实现高效、准确、灵活地完成物料输送,实现物流自动化,提
一种举升侧叉式AGV.pdf
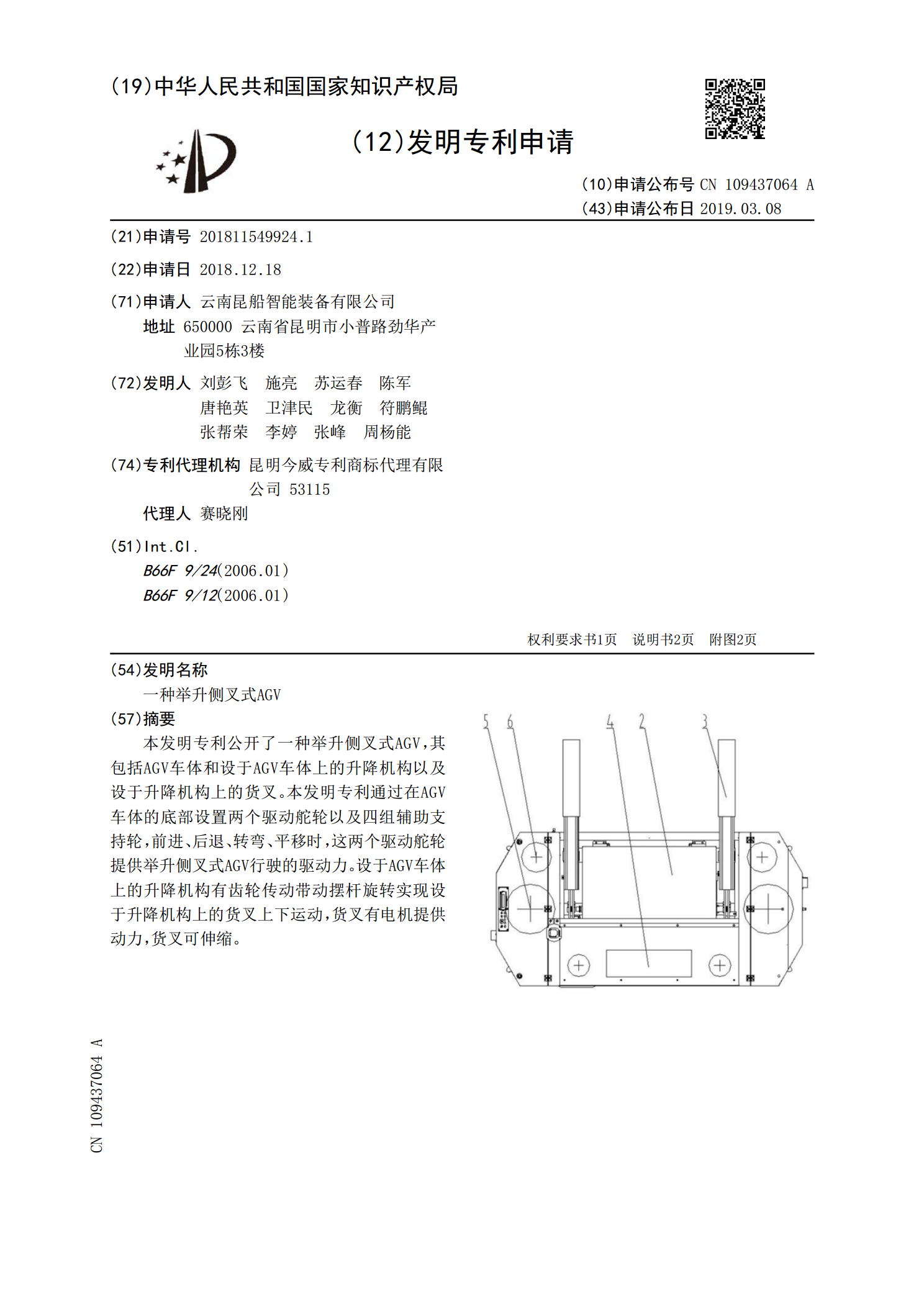
本发明专利公开了一种举升侧叉式AGV,其包括AGV车体和设于AGV车体上的升降机构以及设于升降机构上的货叉。本发明专利通过在AGV车体的底部设置两个驱动舵轮以及四组辅助支持轮,前进、后退、转弯、平移时,这两个驱动舵轮提供举升侧叉式AGV行驶的驱动力。设于AGV车体上的升降机构有齿轮传动带动摆杆旋转实现设于升降机构上的货叉上下运动,货叉有电机提供动力,货叉可伸缩。
一种AGV举升装置.pdf
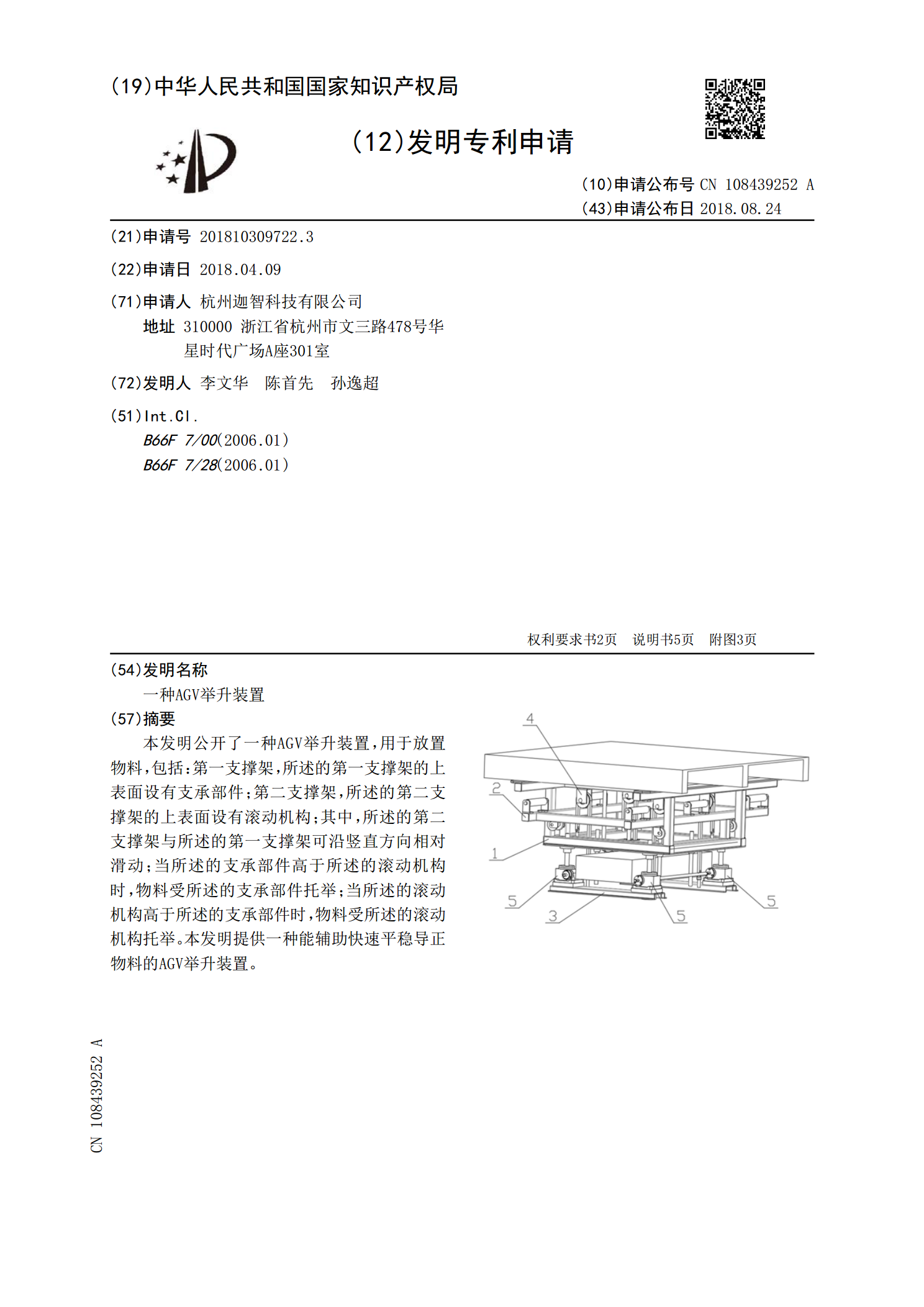
本发明公开了一种AGV举升装置,用于放置物料,包括:第一支撑架,所述的第一支撑架的上表面设有支承部件;第二支撑架,所述的第二支撑架的上表面设有滚动机构;其中,所述的第二支撑架与所述的第一支撑架可沿竖直方向相对滑动;当所述的支承部件高于所述的滚动机构时,物料受所述的支承部件托举;当所述的滚动机构高于所述的支承部件时,物料受所述的滚动机构托举。本发明提供一种能辅助快速平稳导正物料的AGV举升装置。