
一种智能停车系统的AGV姿态估算方法及系统.pdf

海昌****姐淑

1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能停车系统的AGV姿态估算方法及系统.pdf
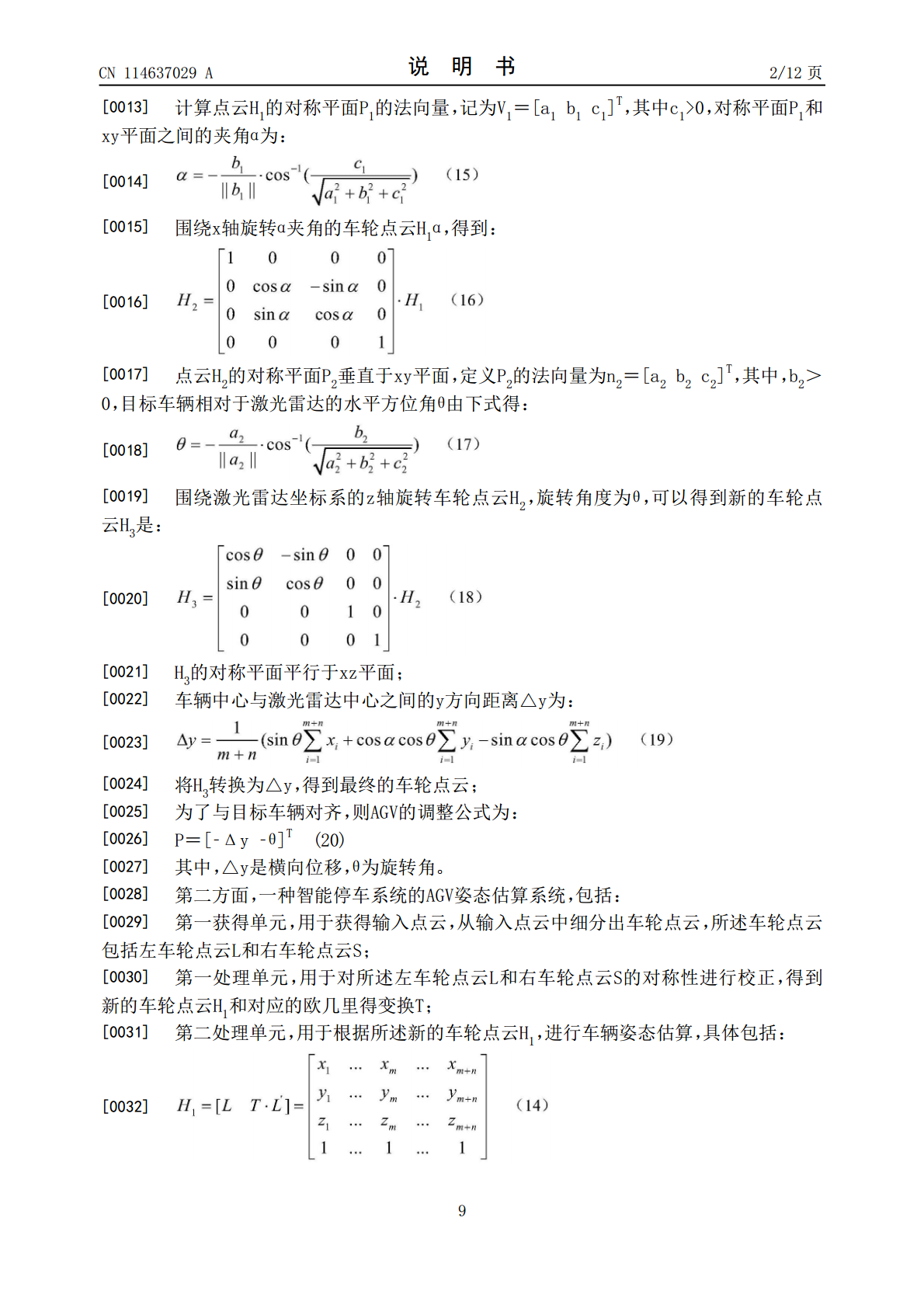
本发明涉及智慧停车技术领域,提出了一种智能停车系统的AGV姿态估算方法及系统,AGV姿态估算方法包括获得输入点云,从输入点云中细分出车轮点云,所述车轮点云包括左车轮点云L和右车轮点云S;对所述左车轮点云L和右车轮点云S的对称性进行校正,得到新的车轮点云H<base:Sub>1</base:Sub>和对应的欧几里得变换T;根据所述新的车轮点云H<base:Sub>1</base:Sub>,进行车辆姿态估算通过上述技术方案,解决了现有技术中无法实现智能停车系统的AGV姿态估算的问题。

一种AGV智能立体停车设备的停车系统.pdf
本发明涉及智能停车技术领域,且公开了一种AGV智能立体停车设备的停车系统,包括中央处理器,所述中央处理器信号输出端与驱动模块信号输入端信号连接,所述驱动模块与AGV运输车电性连接,所述中央处理器信号输出端与路线规划模块信号输入端信号连接,所述路线规划模块信号输出端与定位模块信号输出端信号连接,所述定位模块信号输出端与AGV运输车信号输入端信号连接。本发明通过利用AGV运输车将汽车运输到停车场内部,代替了人工停车,AGV运输车停车的时候可以一辆一辆摆放好,取出来的时候,可以利用AGV运输车一辆一辆取出来,不
一种液压升降式停车AGV、停车AGV系统及停车方法.pdf
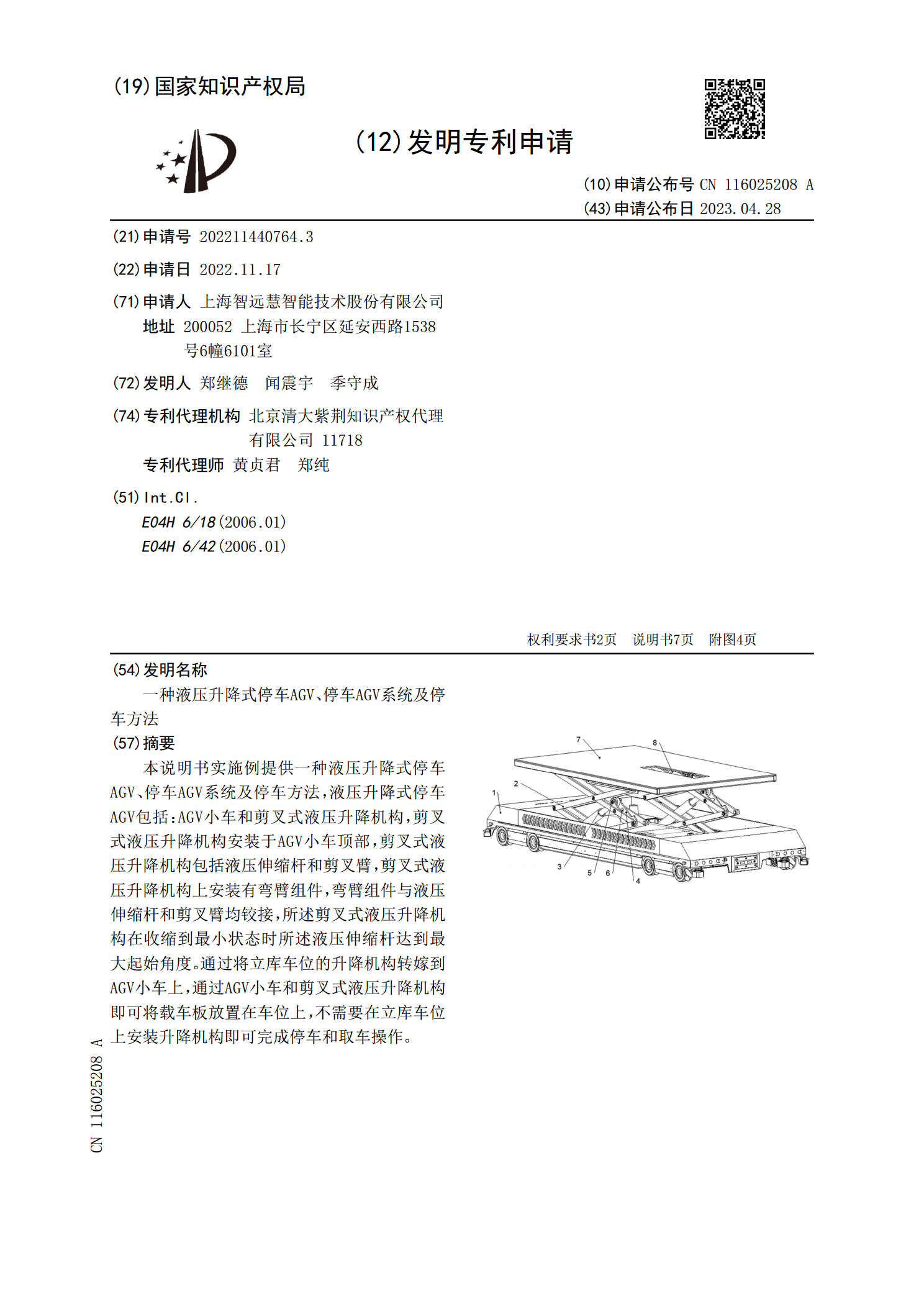
本说明书实施例提供一种液压升降式停车AGV、停车AGV系统及停车方法,液压升降式停车AGV包括:AGV小车和剪叉式液压升降机构,剪叉式液压升降机构安装于AGV小车顶部,剪叉式液压升降机构包括液压伸缩杆和剪叉臂,剪叉式液压升降机构上安装有弯臂组件,弯臂组件与液压伸缩杆和剪叉臂均铰接,所述剪叉式液压升降机构在收缩到最小状态时所述液压伸缩杆达到最大起始角度。通过将立库车位的升降机构转嫁到AGV小车上,通过AGV小车和剪叉式液压升降机构即可将载车板放置在车位上,不需要在立库车位上安装升降机构即可完成停车和取车操作

一种AGV姿态调整方法及系统.pdf
本公开提供一种AGV姿态调整方法及系统,涉及导引运输车领域,获取载物架相对于水平面的倾角和其两侧支撑架的初始长度;获取利用支撑架调节载物架至水平后支撑架的长度;建立载物架倾角与调平载物架后支撑架长度变化量的对应关系,通过预先建立载物台倾角与调平支撑架长度变化量的对应关系,在实际运行中,载物架产生倾斜时,能够快速得出支撑架所需变化的长度,配置对应的调整模块进行调整,达到快速恢复载物架水平状态的目的。

一种智能停车系统及方法.pdf
本发明公开了一种智能停车系统及方法,包括用户客户端,智能停车卡位、停车云系统,区域停车场服务器、室内停车场导航系统。本发明将停车位进行联网,统一按需分配,实时掌握城市内停车位的使用情况,有效提升了信息化、智能化、便捷化程度。节省了硬件建设成本,减少了停车场门口收费亭、收费杆、摄像头的建设成本;提高了停车位的使用效率,智能停车卡位能够及时反馈停车位的使用状况,系统能够高效分配停车位;在平台进行统一收费;削减了停车场人力成本,如收费员成本;大大提高车辆在停车场出入口通行效率,不需要车辆在停车场出入口处进行过杆