
分拣机器人以及分拣方法.pdf

兴朝****45

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

分拣机器人以及分拣方法.pdf
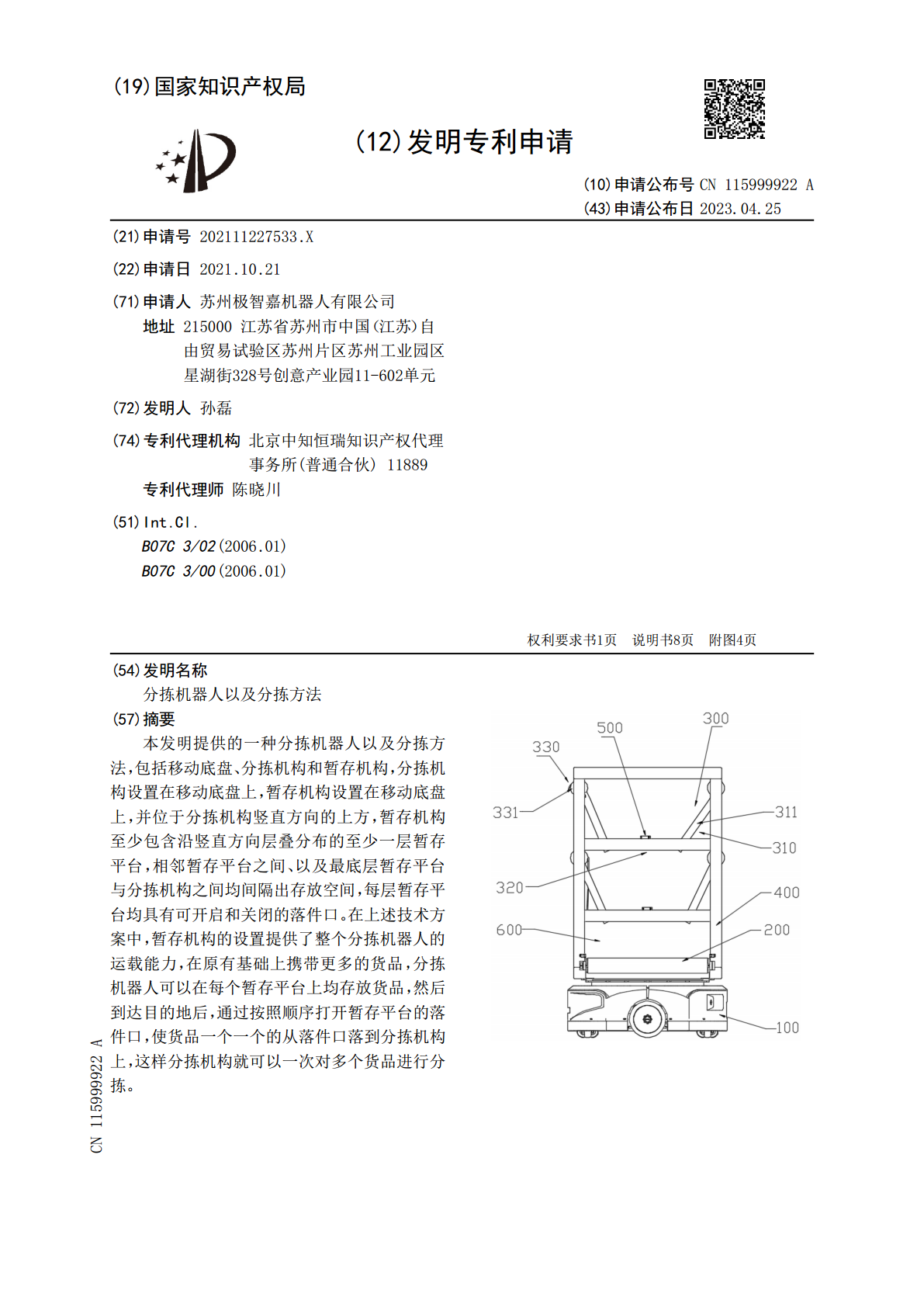
本发明提供的一种分拣机器人以及分拣方法,包括移动底盘、分拣机构和暂存机构,分拣机构设置在移动底盘上,暂存机构设置在移动底盘上,并位于分拣机构竖直方向的上方,暂存机构至少包含沿竖直方向层叠分布的至少一层暂存平台,相邻暂存平台之间、以及最底层暂存平台与分拣机构之间均间隔出存放空间,每层暂存平台均具有可开启和关闭的落件口。在上述技术方案中,暂存机构的设置提供了整个分拣机器人的运载能力,在原有基础上携带更多的货品,分拣机器人可以在每个暂存平台上均存放货品,然后到达目的地后,通过按照顺序打开暂存平台的落件口,使货品

分拣机器人以及物流分拣系统.pdf
本发明提供了一种分拣机器人以及物流分拣系统,涉及物流技术领域,包括底盘、升降装置和输送装置,升降装置设置在底盘上,输送装置设置在升降装置上,输送装置包括纵向设置的至少两个纵向分层设置的输送单元,相邻层所述输送单元通过侧挡板纵向固定,所述侧挡板通过限定相邻层所述输送单元之间的间距,以在相邻层所述输送单元之间限定出暂存空间,所述暂存空间被配置为用于存放分拣目标,所述升降装置被配置为用于通过升降运动调节所述输送单元的高度,所述输送单元被配置为用于输送所述分拣目标。通过增加输送单元的数量提高单次输送分拣目标的数量

轮胎分拣系统以及分拣方法.pdf
本发明涉及一种轮胎分拣系统以及分拣方法,包括输送主线和分拣机,在输送主线的至少一侧设有输送支线,所述输送支线包括依次设置的分拣区、放箱区和运箱区;所述输送主线上设有扫码装置和多个推手,所述推手根据扫码装置反馈的信息选择性地将轮胎推至对应地的分拣区,所述分拣机将分拣区的轮胎抓取放入放箱区的箱内并码垛;码垛后的实箱沿下方设置的传送带移动至运箱区输出,空箱由运箱区移动至放箱区补位。本发明的轮胎分拣系统结构简单,自动化程度高,应用上述分拣系统的分拣方法可实现不同品种的分拣,操作智能化,人力介入少,有效地提升了分拣
图书分拣机器人及图书分拣方法.pdf
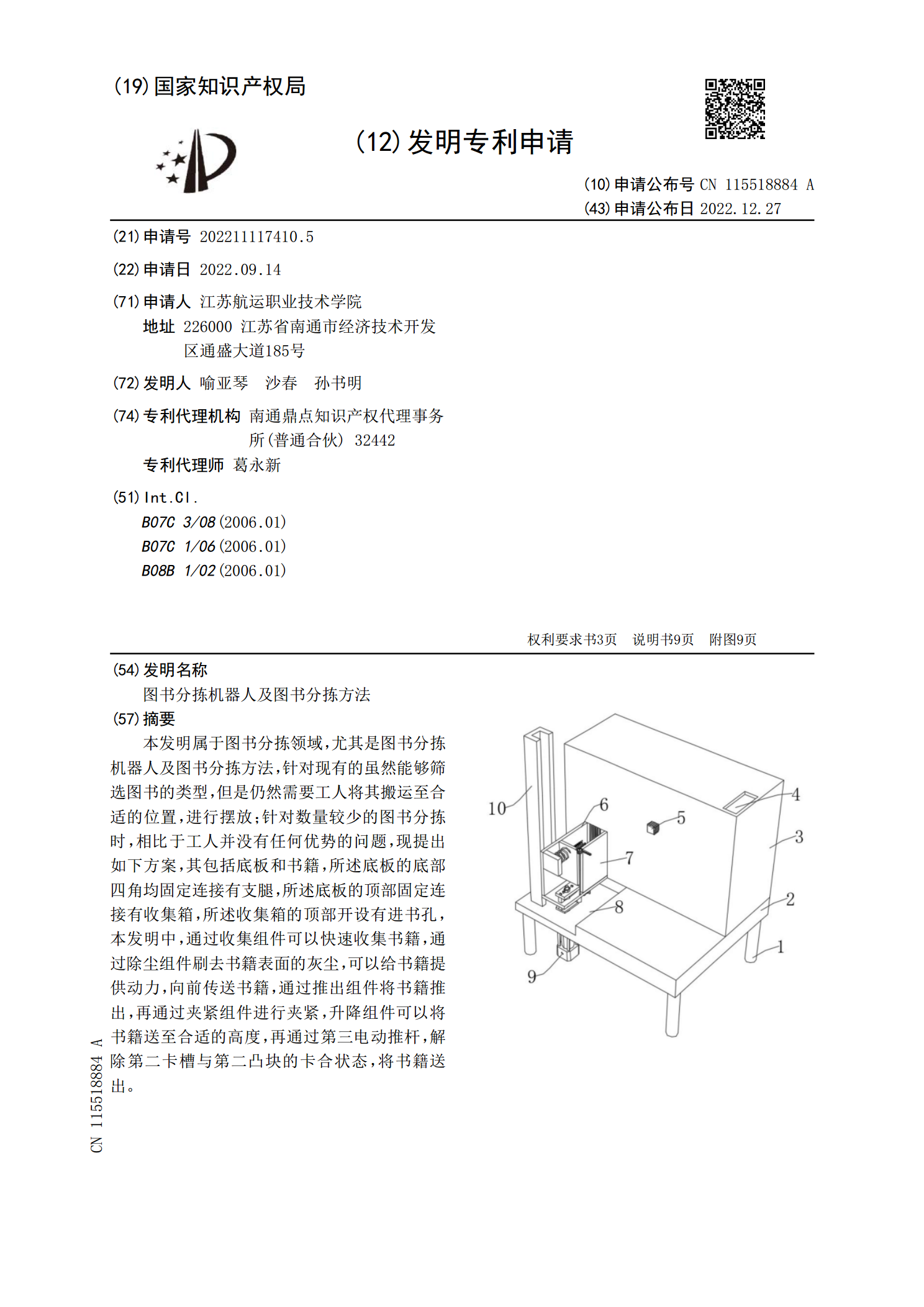
本发明属于图书分拣领域,尤其是图书分拣机器人及图书分拣方法,针对现有的虽然能够筛选图书的类型,但是仍然需要工人将其搬运至合适的位置,进行摆放;针对数量较少的图书分拣时,相比于工人并没有任何优势的问题,现提出如下方案,其包括底板和书籍,所述底板的底部四角均固定连接有支腿,所述底板的顶部固定连接有收集箱,所述收集箱的顶部开设有进书孔,本发明中,通过收集组件可以快速收集书籍,通过除尘组件刷去书籍表面的灰尘,可以给书籍提供动力,向前传送书籍,通过推出组件将书籍推出,再通过夹紧组件进行夹紧,升降组件可以将书籍送至合
基于视觉的移动分拣机器人及其分拣方法.pdf
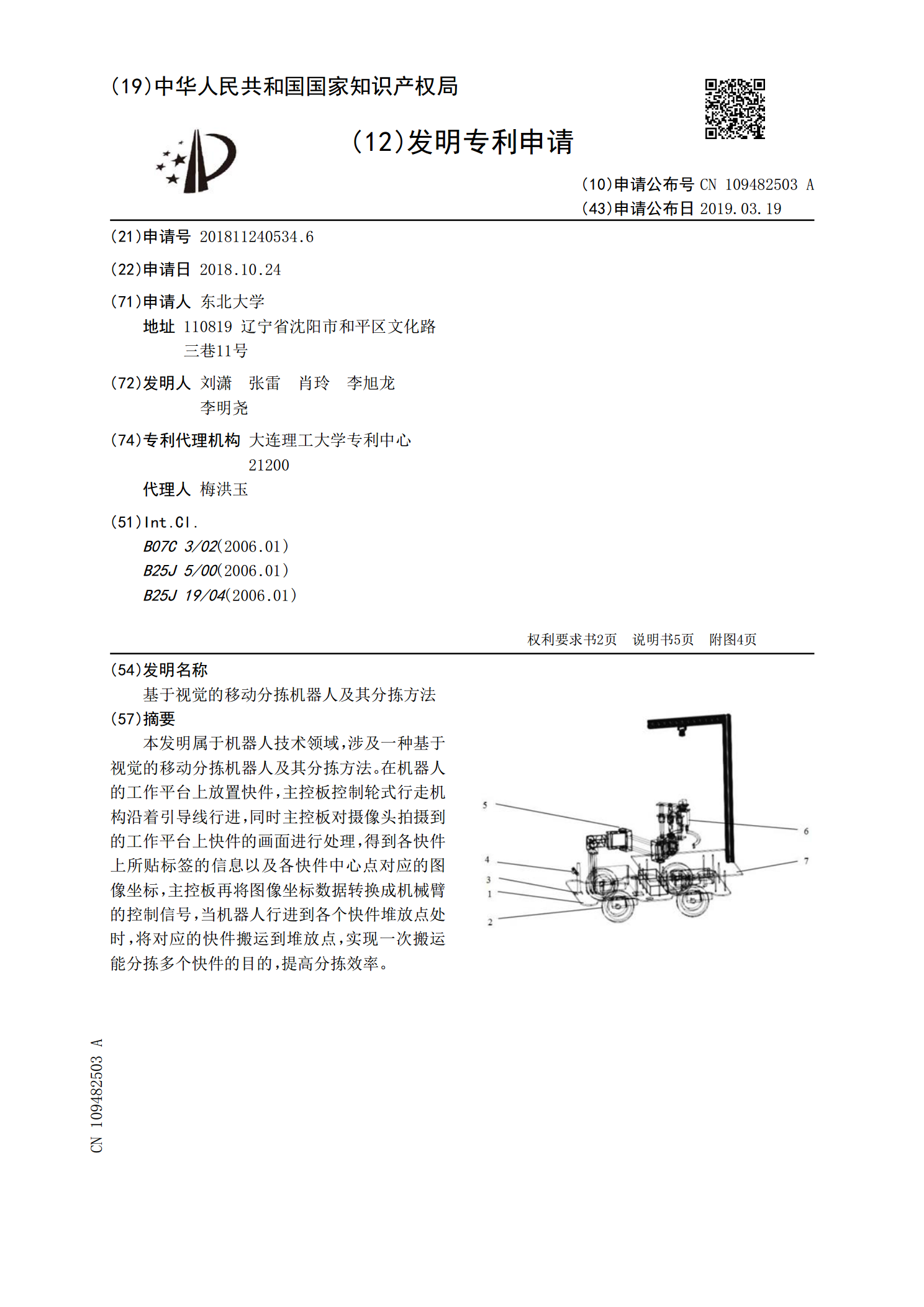
本发明属于机器人技术领域,涉及一种基于视觉的移动分拣机器人及其分拣方法。在机器人的工作平台上放置快件,主控板控制轮式行走机构沿着引导线行进,同时主控板对摄像头拍摄到的工作平台上快件的画面进行处理,得到各快件上所贴标签的信息以及各快件中心点对应的图像坐标,主控板再将图像坐标数据转换成机械臂的控制信号,当机器人行进到各个快件堆放点处时,将对应的快件搬运到堆放点,实现一次搬运能分拣多个快件的目的,提高分拣效率。