
分拣机器人以及物流分拣系统.pdf

书生****瑞梦


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

分拣机器人以及物流分拣系统.pdf
本发明提供了一种分拣机器人以及物流分拣系统,涉及物流技术领域,包括底盘、升降装置和输送装置,升降装置设置在底盘上,输送装置设置在升降装置上,输送装置包括纵向设置的至少两个纵向分层设置的输送单元,相邻层所述输送单元通过侧挡板纵向固定,所述侧挡板通过限定相邻层所述输送单元之间的间距,以在相邻层所述输送单元之间限定出暂存空间,所述暂存空间被配置为用于存放分拣目标,所述升降装置被配置为用于通过升降运动调节所述输送单元的高度,所述输送单元被配置为用于输送所述分拣目标。通过增加输送单元的数量提高单次输送分拣目标的数量

分拣机器人以及分拣方法.pdf
本发明提供的一种分拣机器人以及分拣方法,包括移动底盘、分拣机构和暂存机构,分拣机构设置在移动底盘上,暂存机构设置在移动底盘上,并位于分拣机构竖直方向的上方,暂存机构至少包含沿竖直方向层叠分布的至少一层暂存平台,相邻暂存平台之间、以及最底层暂存平台与分拣机构之间均间隔出存放空间,每层暂存平台均具有可开启和关闭的落件口。在上述技术方案中,暂存机构的设置提供了整个分拣机器人的运载能力,在原有基础上携带更多的货品,分拣机器人可以在每个暂存平台上均存放货品,然后到达目的地后,通过按照顺序打开暂存平台的落件口,使货品

轮胎分拣系统以及分拣方法.pdf
本发明涉及一种轮胎分拣系统以及分拣方法,包括输送主线和分拣机,在输送主线的至少一侧设有输送支线,所述输送支线包括依次设置的分拣区、放箱区和运箱区;所述输送主线上设有扫码装置和多个推手,所述推手根据扫码装置反馈的信息选择性地将轮胎推至对应地的分拣区,所述分拣机将分拣区的轮胎抓取放入放箱区的箱内并码垛;码垛后的实箱沿下方设置的传送带移动至运箱区输出,空箱由运箱区移动至放箱区补位。本发明的轮胎分拣系统结构简单,自动化程度高,应用上述分拣系统的分拣方法可实现不同品种的分拣,操作智能化,人力介入少,有效地提升了分拣
物流分拣线及物流分拣系统.pdf
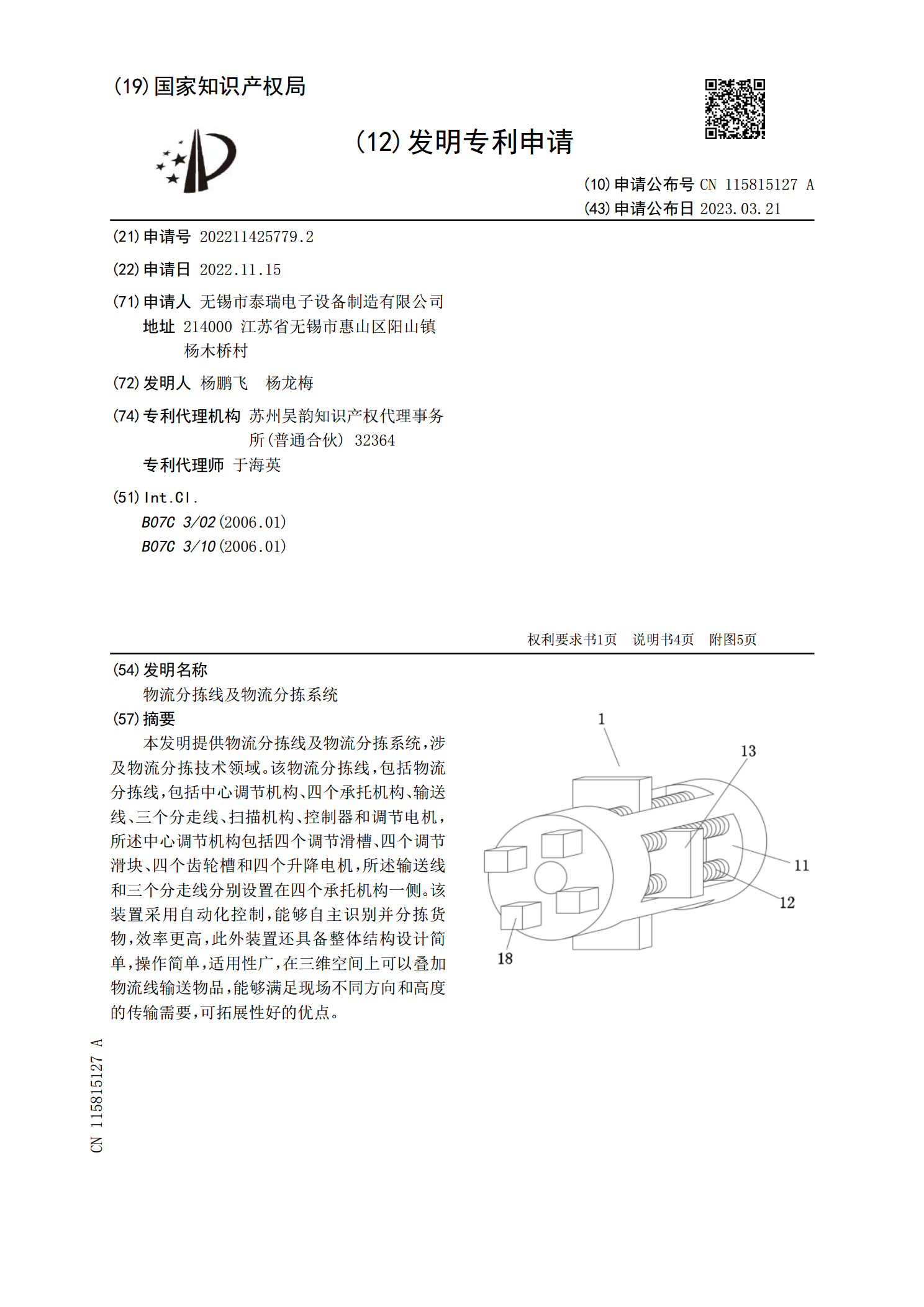
本发明提供物流分拣线及物流分拣系统,涉及物流分拣技术领域。该物流分拣线,包括物流分拣线,包括中心调节机构、四个承托机构、输送线、三个分走线、扫描机构、控制器和调节电机,所述中心调节机构包括四个调节滑槽、四个调节滑块、四个齿轮槽和四个升降电机,所述输送线和三个分走线分别设置在四个承托机构一侧。该装置采用自动化控制,能够自主识别并分拣货物,效率更高,此外装置还具备整体结构设计简单,操作简单,适用性广,在三维空间上可以叠加物流线输送物品,能够满足现场不同方向和高度的传输需要,可拓展性好的优点。
转送装置以及物流分拣系统.pdf
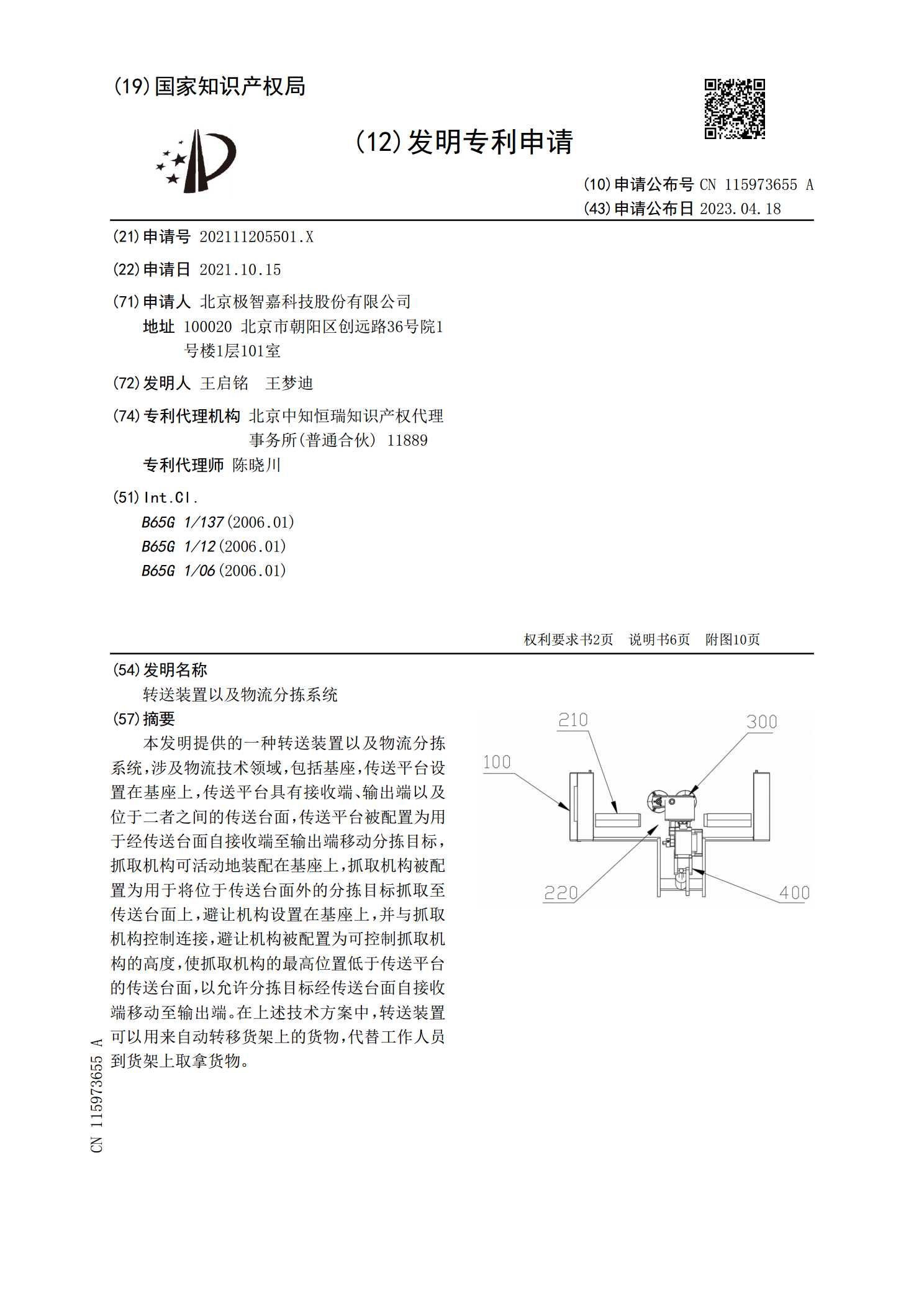
本发明提供的一种转送装置以及物流分拣系统,涉及物流技术领域,包括基座,传送平台设置在基座上,传送平台具有接收端、输出端以及位于二者之间的传送台面,传送平台被配置为用于经传送台面自接收端至输出端移动分拣目标,抓取机构可活动地装配在基座上,抓取机构被配置为用于将位于传送台面外的分拣目标抓取至传送台面上,避让机构设置在基座上,并与抓取机构控制连接,避让机构被配置为可控制抓取机构的高度,使抓取机构的最高位置低于传送平台的传送台面,以允许分拣目标经传送台面自接收端移动至输出端。在上述技术方案中,转送装置可以用来自动