
一种单孔微创外科手术机器人的手术执行臂悬挂布局结构.pdf

猫巷****熙柔


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种单孔微创外科手术机器人的手术执行臂悬挂布局结构.pdf
本发明公开了一种单孔微创外科手术机器人的手术执行臂悬挂布局结构,包括水平位置调节臂、姿态调节臂、手术执行臂平台、手术执行臂导向管等;水平位置调节臂安装在顶部平台上,姿态调节臂安装于水平位置调节臂上;手术执行臂平台和手术执行臂导向管安装在姿态调节臂上,手术执行臂伸缩模组安装在手术执行臂平台上;手术执行臂伸缩模组包括手术执行臂伸缩轨道和手术执行臂驱动盒连接座,手术执行臂驱动盒连接座用于安装手术执行臂,提供手术执行臂动作的驱动力;通过调整水平位置调节臂和立柱可以实现对手术执行臂伸入创口位置的快速定位;在此基础上

一种柔性单孔微创手术机器人.pdf
本发明公开了一种柔性单孔微创手术机器人。该机器人系统包括:多个(编号1至20)柔性单元体、21柔性单元体底座、22顶盘、23导轨、24‑1轴承座、25镍钛合金丝、26螺栓、27‑1丝杆、28‑1丝杆法兰螺母、29‑1法兰螺母座、30螺栓、31‑1轴承座、32、半球壳、33‑1电机、34‑1轴承座支撑架、35‑1联轴器、36底座、多个(编号37至55)弹簧组(每组3个);本发明机器人关节单元包含的两个旋转轴之间的夹角具有可调功能。本发明的机器人关节灵活性好,柔性部分硬度高,运动灵活多变。

外科手术操作臂及外科手术机器人.pdf
本发明公开了一种外科手术操作臂,包括支架组件、至少一个运动组件、弯曲驱动组件和内窥镜。支架组件包括前、后支撑座,以及通过支撑杆连接至前支撑座的弯曲组件,其中,所述弯曲组件包括与所述支撑杆相连的后端构件,以及通过转轴与所述后端构件可枢转地依次连接的中间构件和前端构件。每个运动组件均包括平行设置的多个传动组件。传动组件的弹性丝杆可滑动地穿过分别开设在前端构件、中间构件和后端构件中的第一通孔。弯曲驱动组件的驱动绳可滑动地穿过分别开设在前端构件和中间构件的第二通孔,并且固定连接至后端构件。驱动绳适于驱动前端构件、

一种框架式辅助微创外科单孔手术机器人.pdf
本发明公开了一种框架式辅助微创外科单孔手术机器人,包括支腿、立柱和操作臂,所述的支腿支撑并固定整个辅助微创外科单孔手术机器人;所述的立柱垂直固定于所述的支腿上,其支撑并固定辅助微创外科单孔手术机器人的操作臂;所述的支腿、所述的立柱、所述的操作臂和所述的连接座的相邻的臂段之间通过旋转关节或者移动关节相连,且所述的连接座连接一个快接接头,在所述的快接接头上安装内窥镜或手术器械。所述的立柱、所述的操作臂和所述的连接座的相邻的臂段之间可以通过臂段之间的旋转关节相对旋转进行“折叠”,从而使操作臂的各臂段及连接座和手
一种用于微创外科手术机器人手术器械.pdf
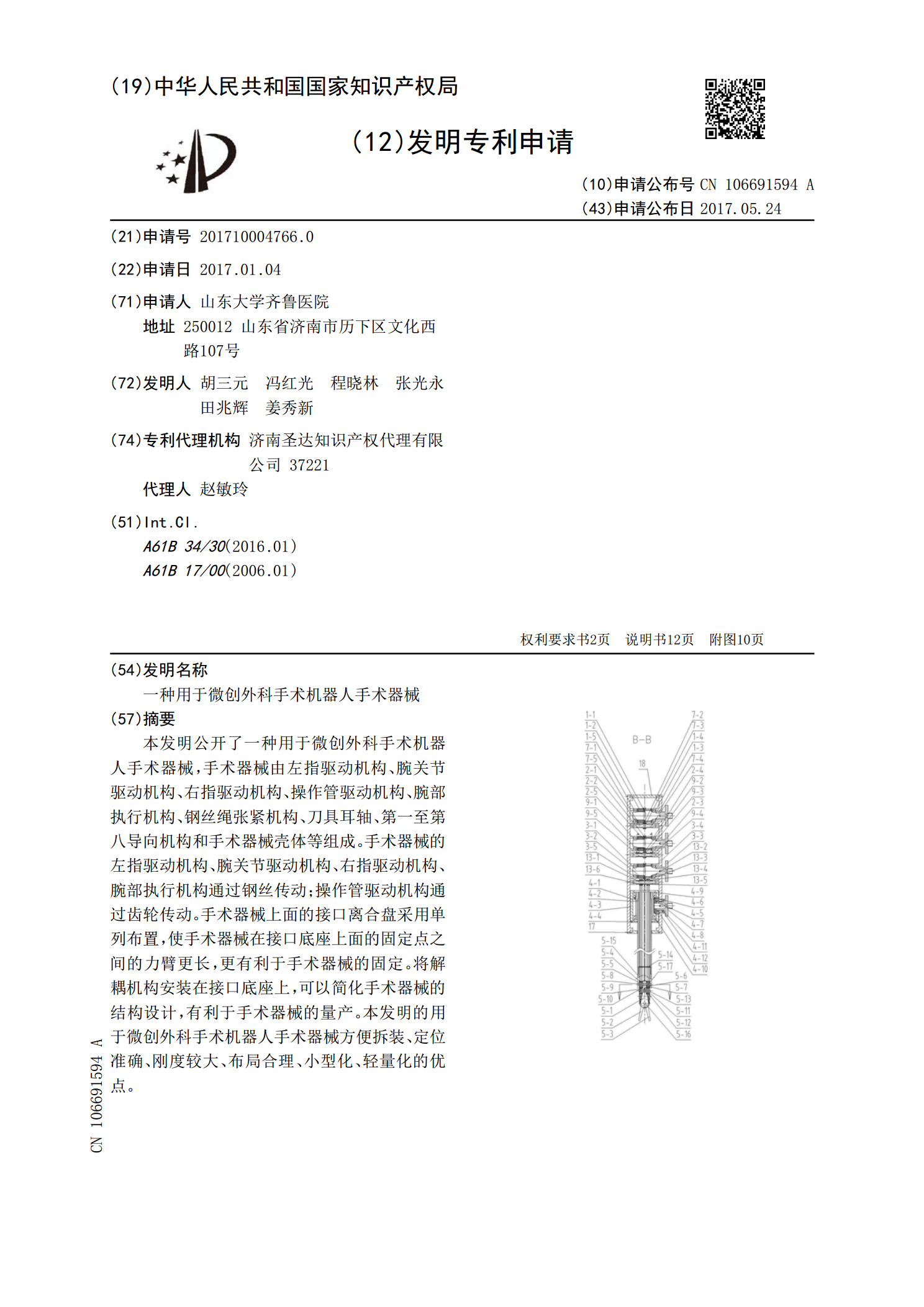
本发明公开了一种用于微创外科手术机器人手术器械,手术器械由左指驱动机构、腕关节驱动机构、右指驱动机构、操作管驱动机构、腕部执行机构、钢丝绳张紧机构、刀具耳轴、第一至第八导向机构和手术器械壳体等组成。手术器械的左指驱动机构、腕关节驱动机构、右指驱动机构、腕部执行机构通过钢丝传动;操作管驱动机构通过齿轮传动。手术器械上面的接口离合盘采用单列布置,使手术器械在接口底座上面的固定点之间的力臂更长,更有利于手术器械的固定。将解耦机构安装在接口底座上,可以简化手术器械的结构设计,有利于手术器械的量产。本发明的用于微创