
一种用于微创外科手术机器人手术器械.pdf

努力****骞北

1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于微创外科手术机器人手术器械.pdf
本发明公开了一种用于微创外科手术机器人手术器械,手术器械由左指驱动机构、腕关节驱动机构、右指驱动机构、操作管驱动机构、腕部执行机构、钢丝绳张紧机构、刀具耳轴、第一至第八导向机构和手术器械壳体等组成。手术器械的左指驱动机构、腕关节驱动机构、右指驱动机构、腕部执行机构通过钢丝传动;操作管驱动机构通过齿轮传动。手术器械上面的接口离合盘采用单列布置,使手术器械在接口底座上面的固定点之间的力臂更长,更有利于手术器械的固定。将解耦机构安装在接口底座上,可以简化手术器械的结构设计,有利于手术器械的量产。本发明的用于微创
一种用于微创手术机器人的手术器械及微创手术机器人.pdf
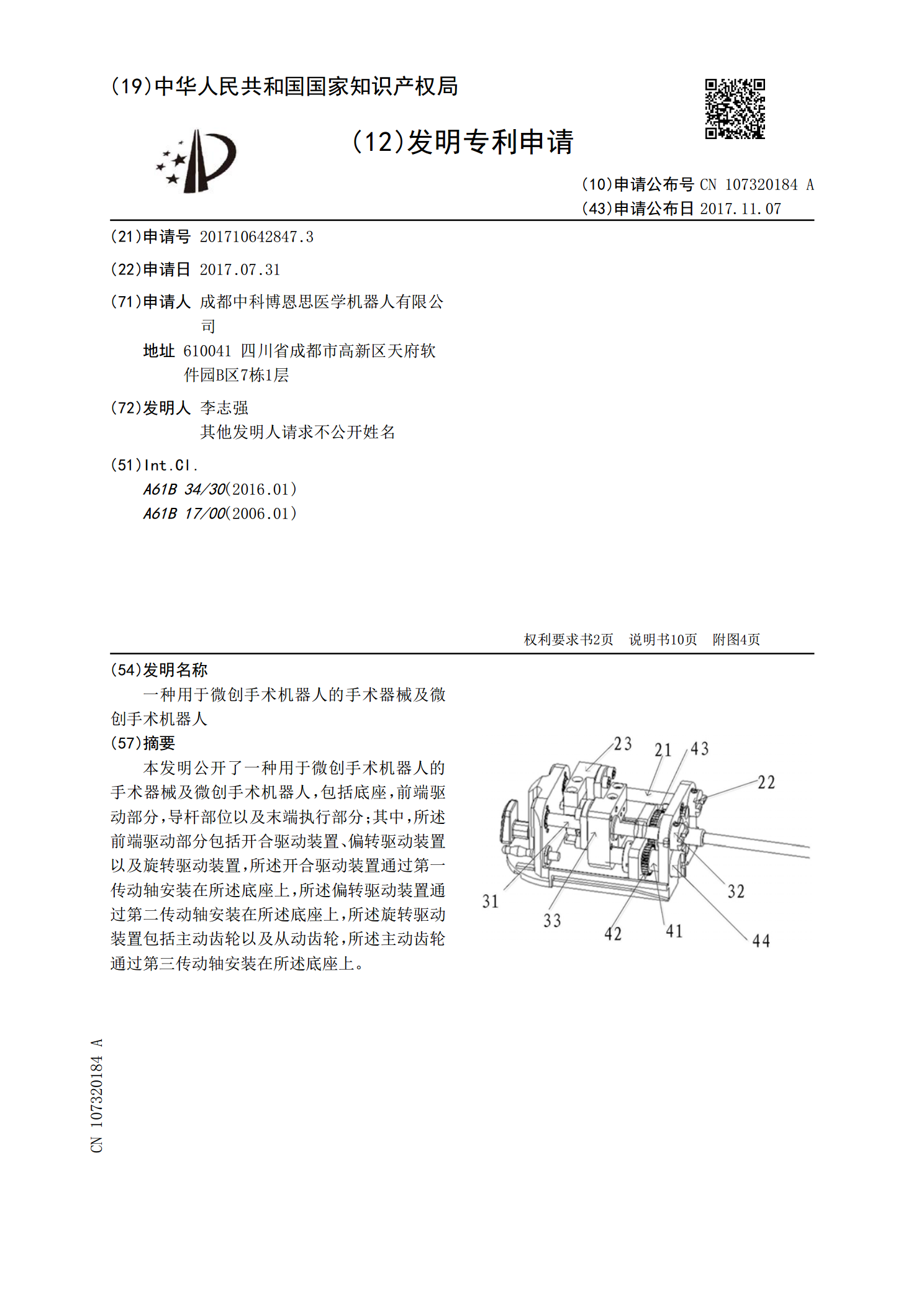
本发明公开了一种用于微创手术机器人的手术器械及微创手术机器人,包括底座,前端驱动部分,导杆部位以及末端执行部分;其中,所述前端驱动部分包括开合驱动装置、偏转驱动装置以及旋转驱动装置,所述开合驱动装置通过第一传动轴安装在所述底座上,所述偏转驱动装置通过第二传动轴安装在所述底座上,所述旋转驱动装置包括主动齿轮以及从动齿轮,所述主动齿轮通过第三传动轴安装在所述底座上。
一种用于辅助微创外科手术的机器人主动支架.pdf
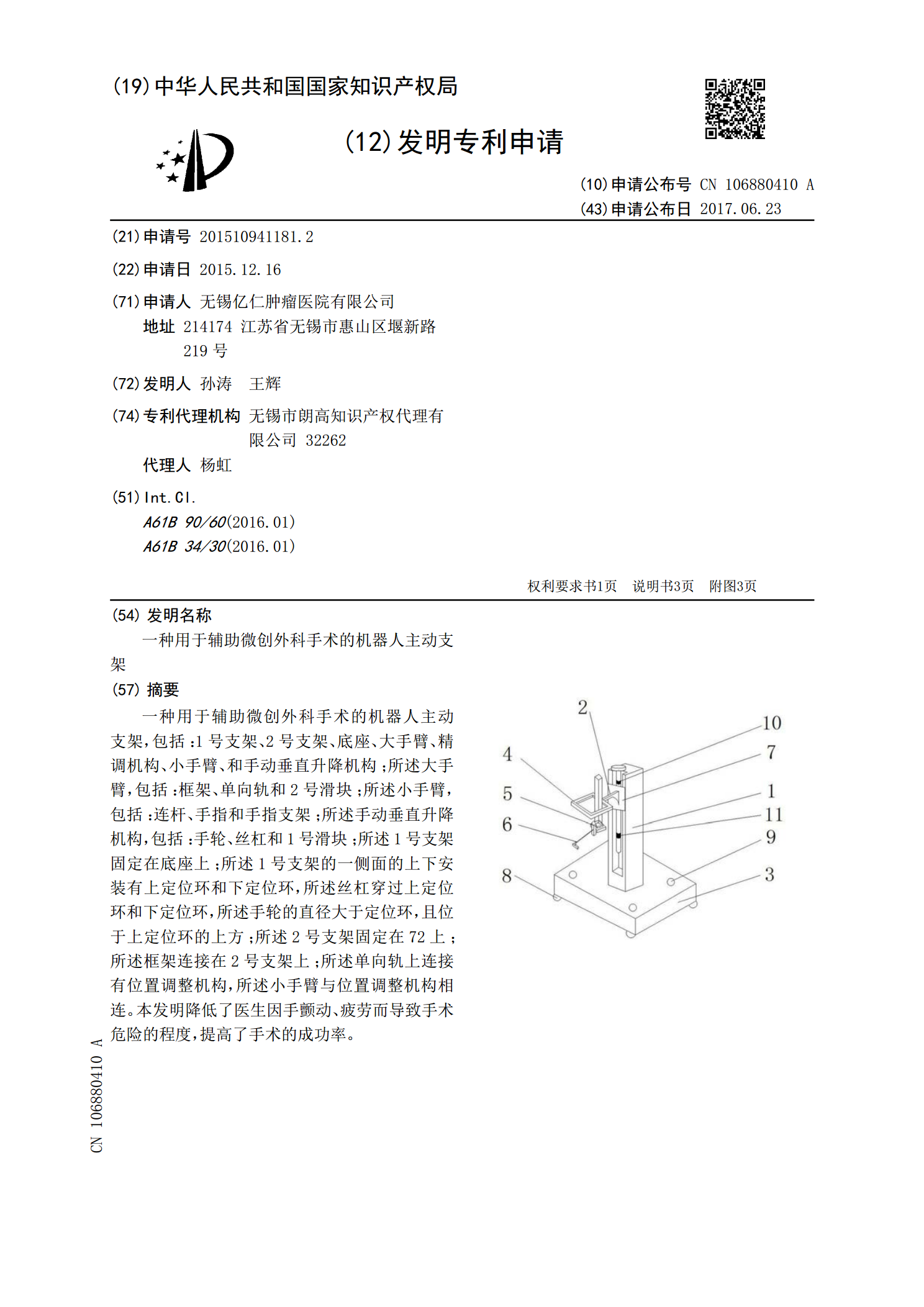
一种用于辅助微创外科手术的机器人主动支架,包括:1号支架、2号支架、底座、大手臂、精调机构、小手臂、和手动垂直升降机构;所述大手臂,包括:框架、单向轨和2号滑块;所述小手臂,包括:连杆、手指和手指支架;所述手动垂直升降机构,包括:手轮、丝杠和1号滑块;所述1号支架固定在底座上;所述1号支架的一侧面的上下安装有上定位环和下定位环,所述丝杠穿过上定位环和下定位环,所述手轮的直径大于定位环,且位于上定位环的上方;所述2号支架固定在72上;所述框架连接在2号支架上;所述单向轨上连接有位置调整机构,所述小手臂与位置
外科手术器械驱动机构、超声刀及微创手术机器人.pdf
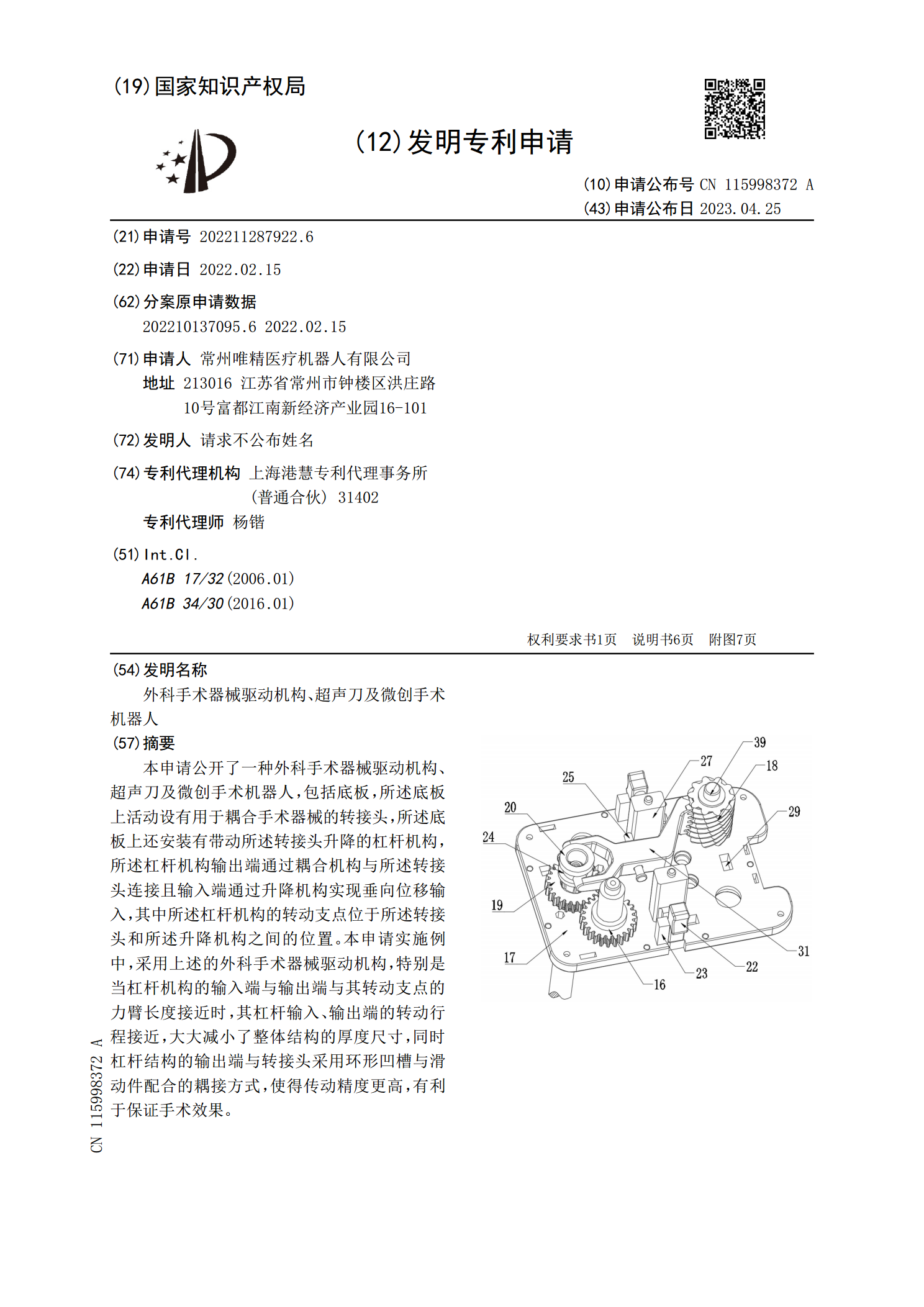
本申请公开了一种外科手术器械驱动机构、超声刀及微创手术机器人,包括底板,所述底板上活动设有用于耦合手术器械的转接头,所述底板上还安装有带动所述转接头升降的杠杆机构,所述杠杆机构输出端通过耦合机构与所述转接头连接且输入端通过升降机构实现垂向位移输入,其中所述杠杆机构的转动支点位于所述转接头和所述升降机构之间的位置。本申请实施例中,采用上述的外科手术器械驱动机构,特别是当杠杆机构的输入端与输出端与其转动支点的力臂长度接近时,其杠杆输入、输出端的转动行程接近,大大减小了整体结构的厚度尺寸,同时杠杆结构的输出端与
外科手术器械和用于外科手术器械的工具.pdf
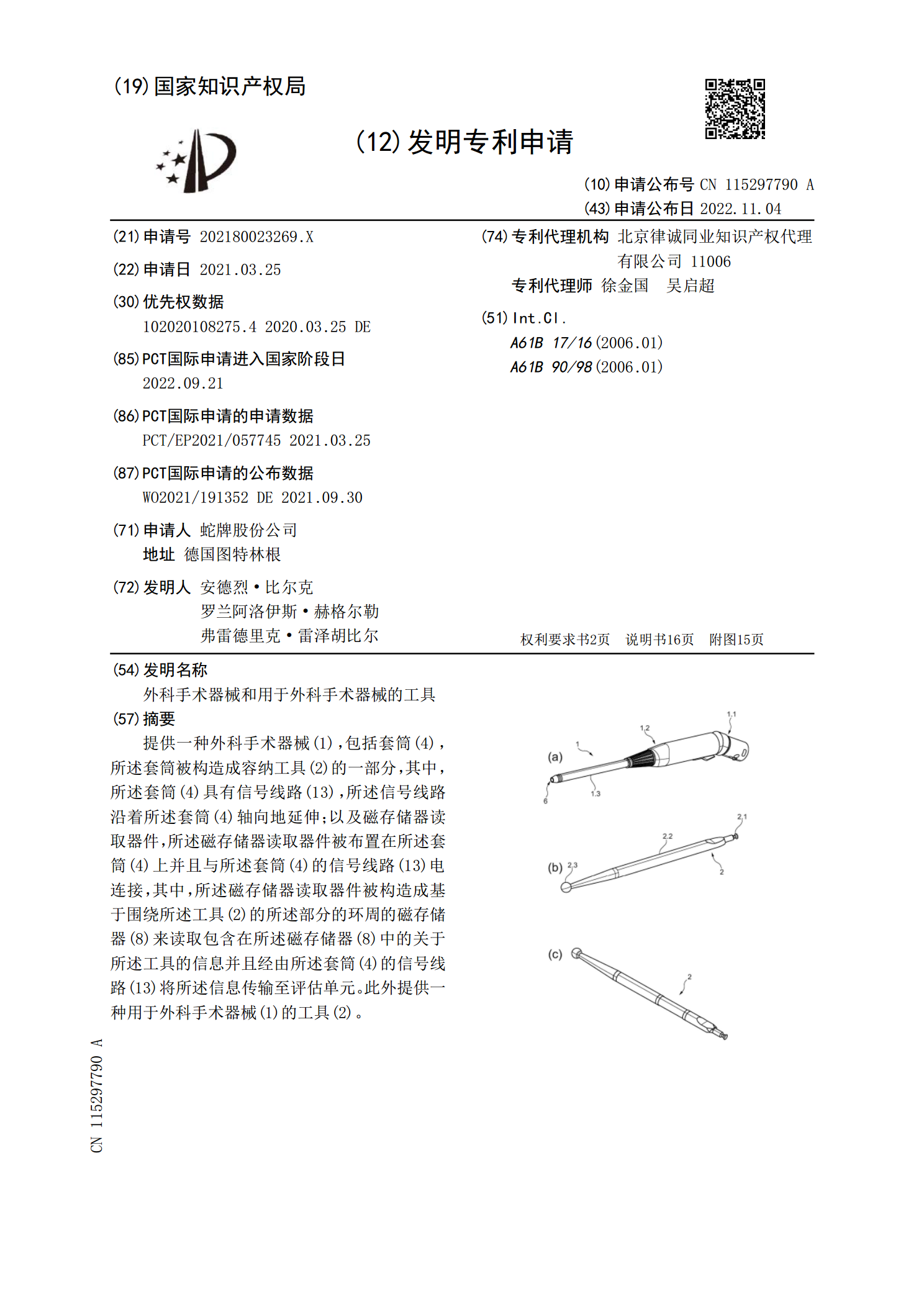
提供一种外科手术器械(1),包括套筒(4),所述套筒被构造成容纳工具(2)的一部分,其中,所述套筒(4)具有信号线路(13),所述信号线路沿着所述套筒(4)轴向地延伸;以及磁存储器读取器件,所述磁存储器读取器件被布置在所述套筒(4)上并且与所述套筒(4)的信号线路(13)电连接,其中,所述磁存储器读取器件被构造成基于围绕所述工具(2)的所述部分的环周的磁存储器(8)来读取包含在所述磁存储器(8)中的关于所述工具的信息并且经由所述套筒(4)的信号线路(13)将所述信息传输至评估单元。此外提供一种用于外科手术