
一种基于视觉定位的平面物体自动抓取摆放装置和方法.pdf

英瑞****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉定位的平面物体自动抓取摆放装置和方法.pdf
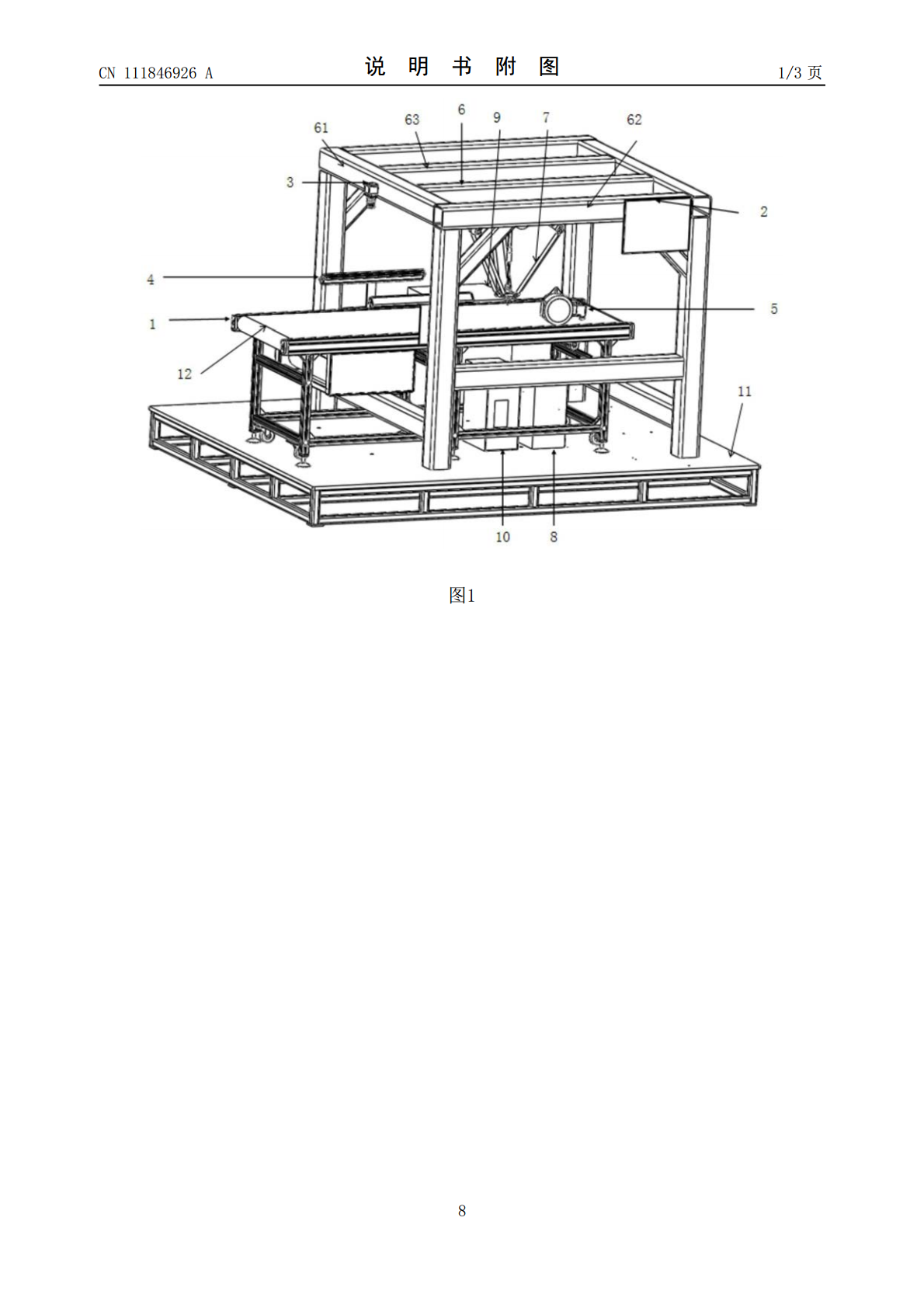
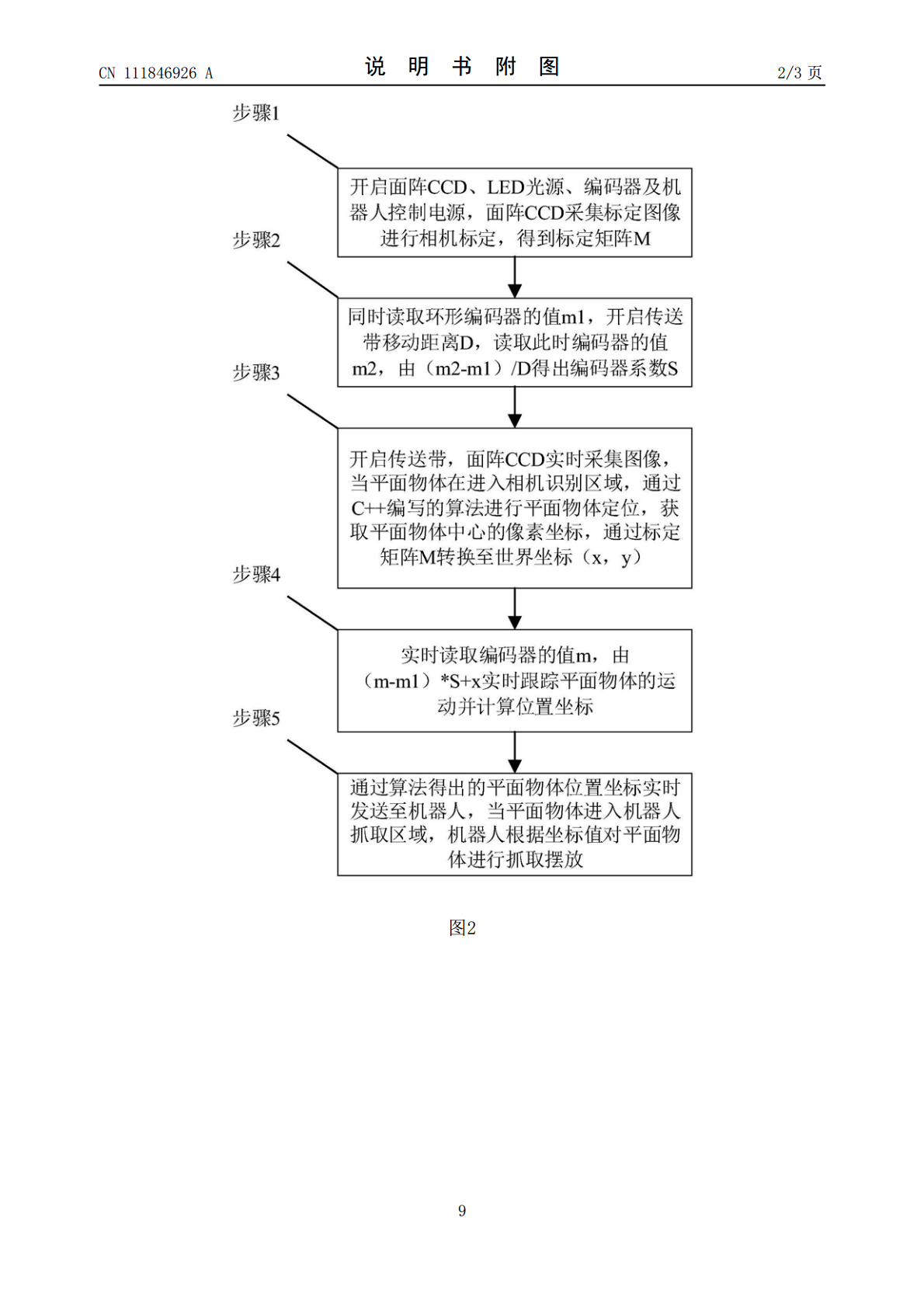
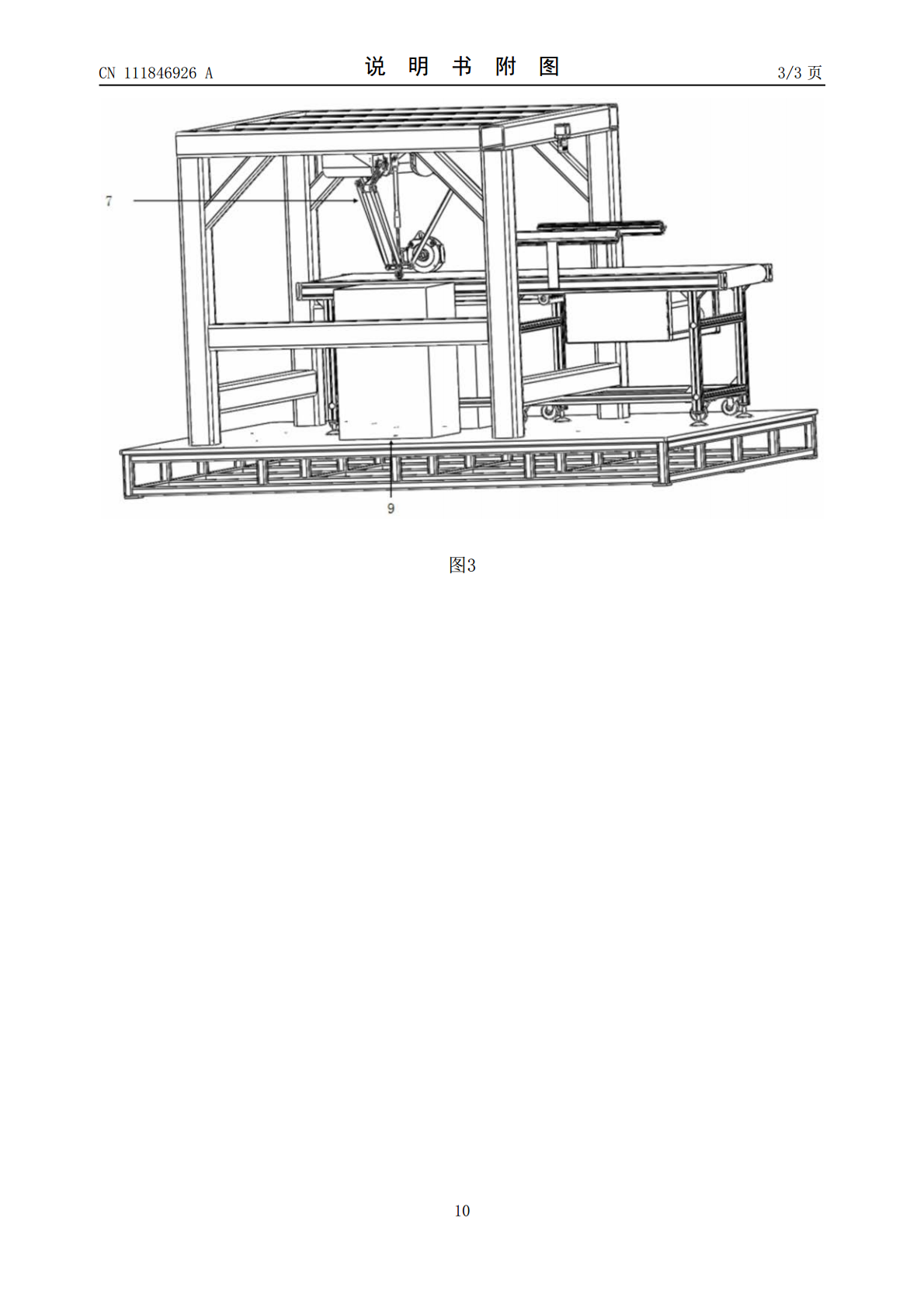
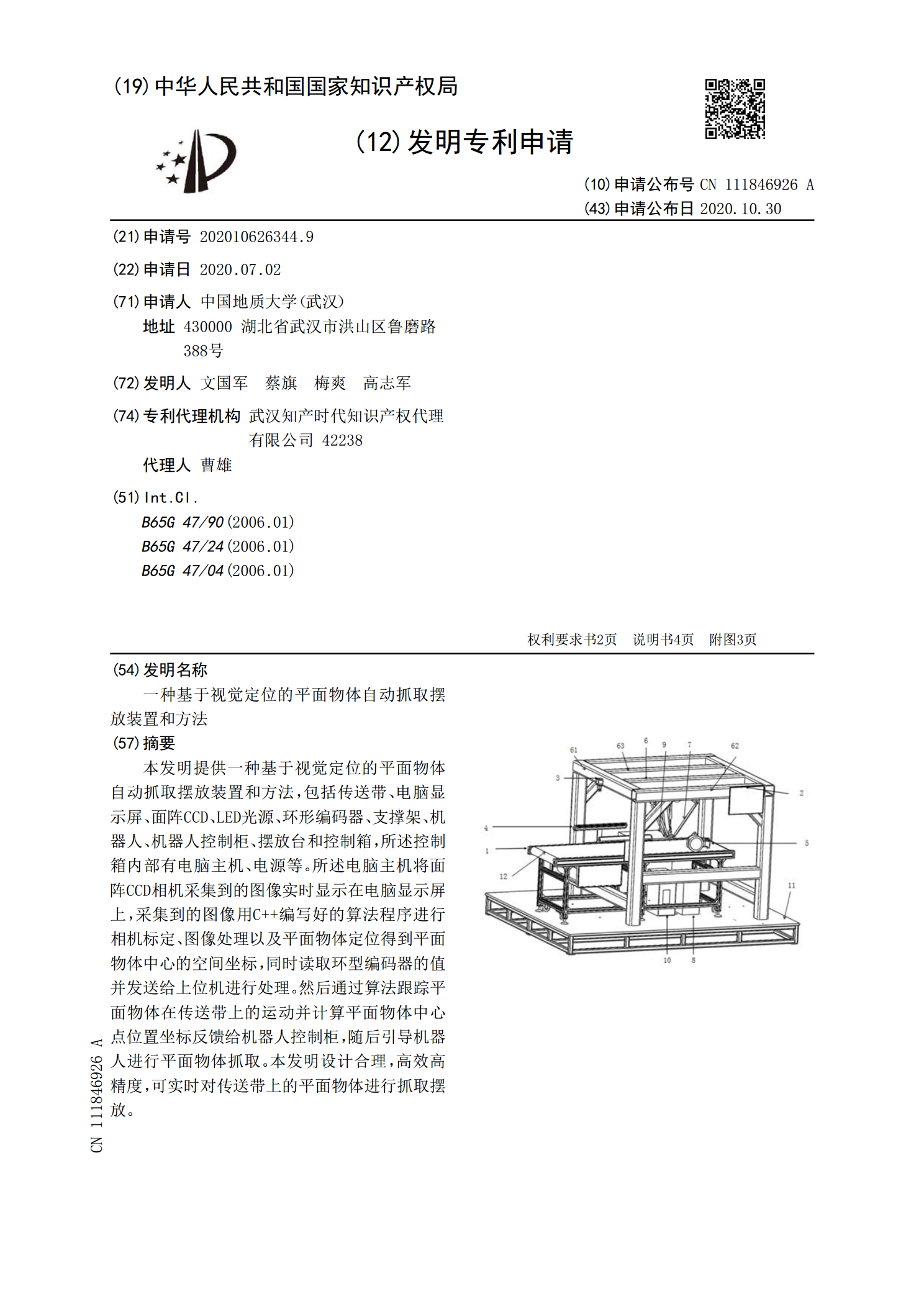
本发明提供一种基于视觉定位的平面物体自动抓取摆放装置和方法,包括传送带、电脑显示屏、面阵CCD、LED光源、环形编码器、支撑架、机器人、机器人控制柜、摆放台和控制箱,所述控制箱内部有电脑主机、电源等。所述电脑主机将面阵CCD相机采集到的图像实时显示在电脑显示屏上,采集到的图像用C++编写好的算法程序进行相机标定、图像处理以及平面物体定位得到平面物体中心的空间坐标,同时读取环型编码器的值并发送给上位机进行处理。然后通过算法跟踪平面物体在传送带上的运动并计算平面物体中心点位置坐标反馈给机器人控制柜,随后引导机

基于视觉定位的冷轧厂轧辊的自动抓取方法.pdf
本发明公开了一种基于视觉定位的冷轧厂轧辊的自动抓取方法,包含如下步骤:训练数据驱动赋权的目标检测模型;对轧辊的图片进行目标检测与三维定位;与PLC控制系统建立通信控制关系。本发明能够利用PLC控制系统实现自动对轧辊进行识别定位与抓取,解决了现有技术高度依赖人工,且抓取轨迹无法溯源的缺陷,有效的改善模型的检测识别精度,摆脱了现有技术中NMS的局限性,降低了时间成本与人工成本,提高了工作效率。
一种基于双目视觉的快递包裹抓取装置和抓取方法.pdf
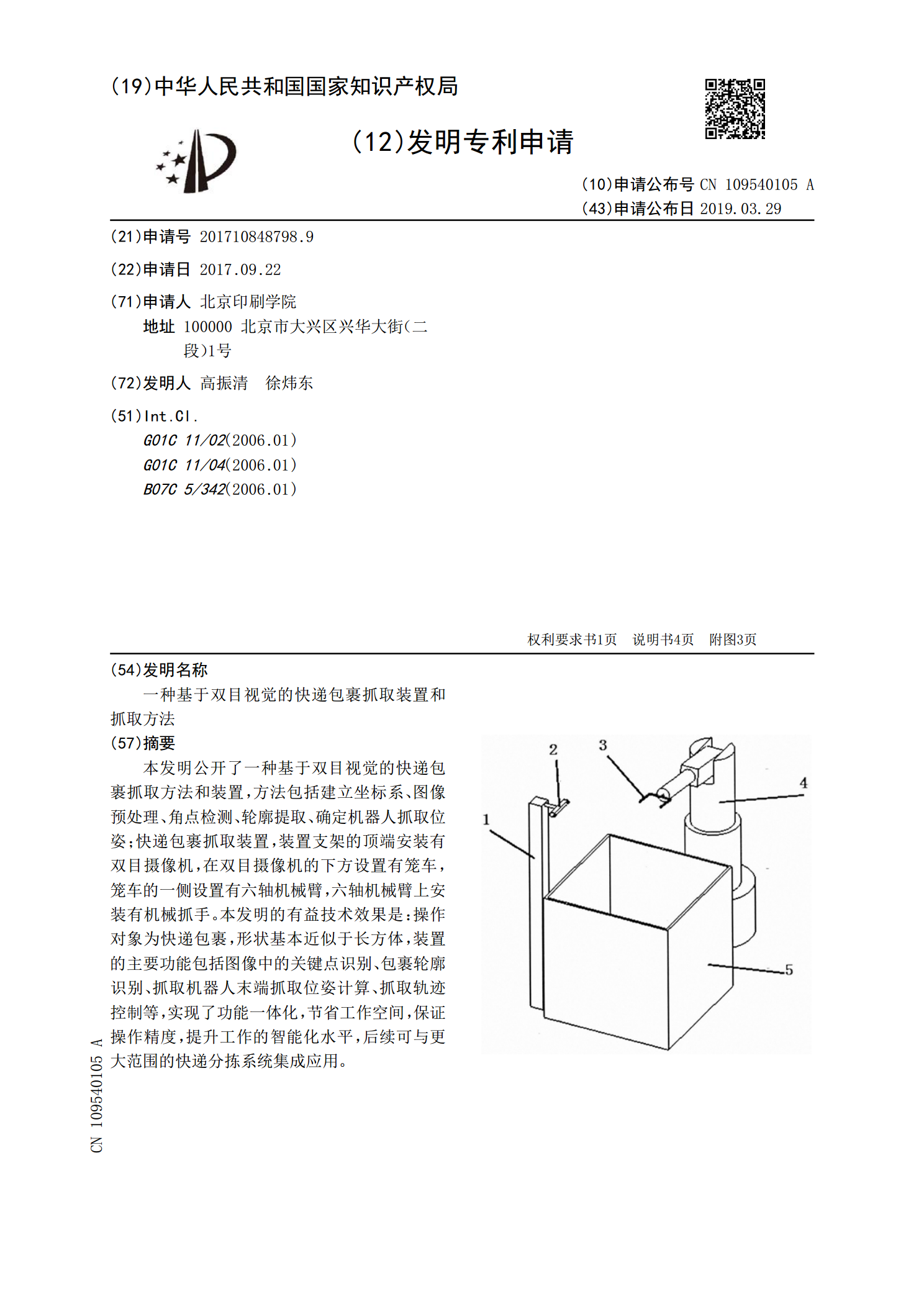
本发明公开了一种基于双目视觉的快递包裹抓取方法和装置,方法包括建立坐标系、图像预处理、角点检测、轮廓提取、确定机器人抓取位姿;快递包裹抓取装置,装置支架的顶端安装有双目摄像机,在双目摄像机的下方设置有笼车,笼车的一侧设置有六轴机械臂,六轴机械臂上安装有机械抓手。本发明的有益技术效果是:操作对象为快递包裹,形状基本近似于长方体,装置的主要功能包括图像中的关键点识别、包裹轮廓识别、抓取机器人末端抓取位姿计算、抓取轨迹控制等,实现了功能一体化,节省工作空间,保证操作精度,提升工作的智能化水平,后续可与更大范围的
一种基于平面视觉引导机械臂的抓取方法.pdf
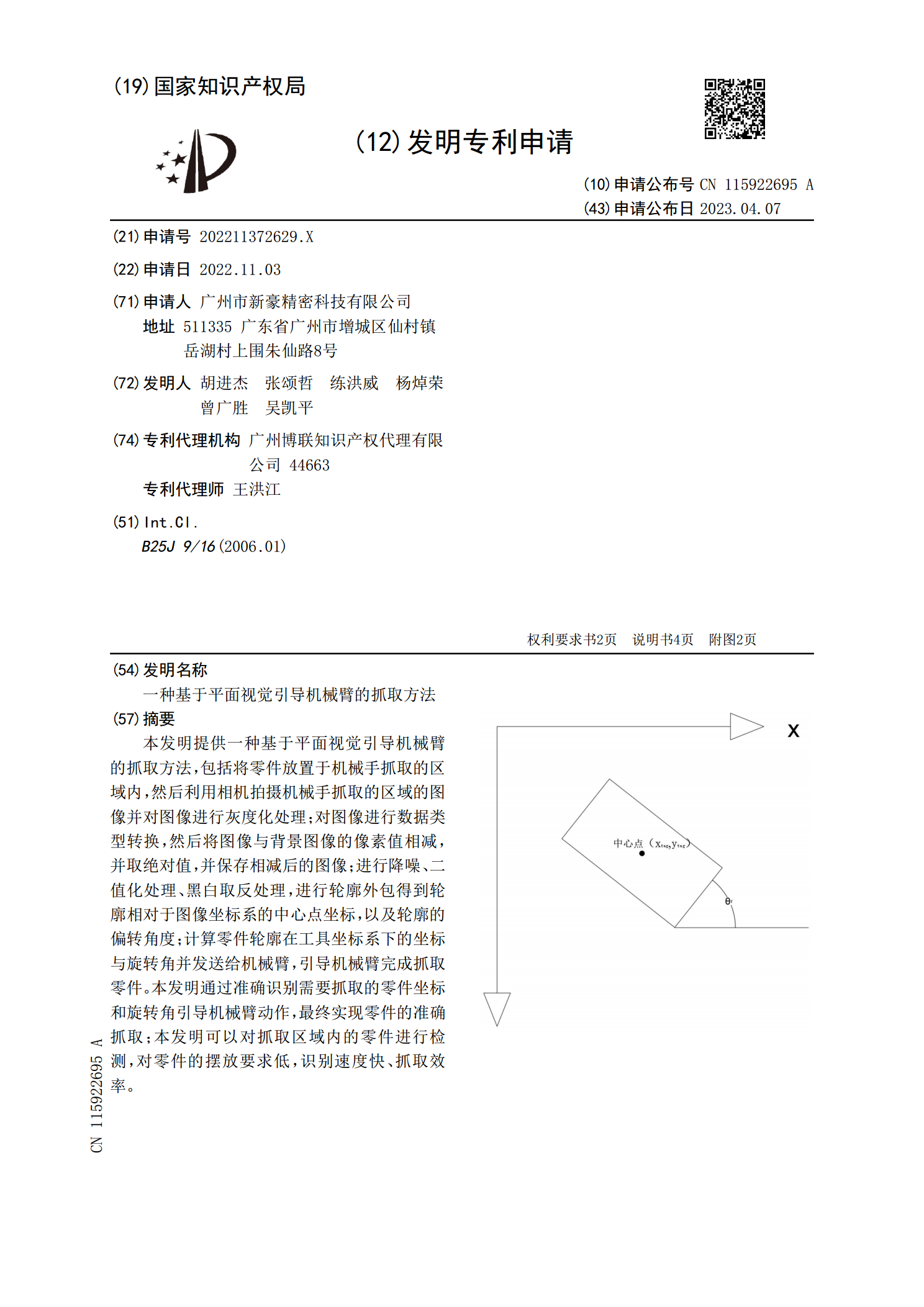
本发明提供一种基于平面视觉引导机械臂的抓取方法,包括将零件放置于机械手抓取的区域内,然后利用相机拍摄机械手抓取的区域的图像并对图像进行灰度化处理;对图像进行数据类型转换,然后将图像与背景图像的像素值相减,并取绝对值,并保存相减后的图像;进行降噪、二值化处理、黑白取反处理,进行轮廓外包得到轮廓相对于图像坐标系的中心点坐标,以及轮廓的偏转角度;计算零件轮廓在工具坐标系下的坐标与旋转角并发送给机械臂,引导机械臂完成抓取零件。本发明通过准确识别需要抓取的零件坐标和旋转角引导机械臂动作,最终实现零件的准确抓取;本发
一种室内物体自动标识定位方法和装置.pdf
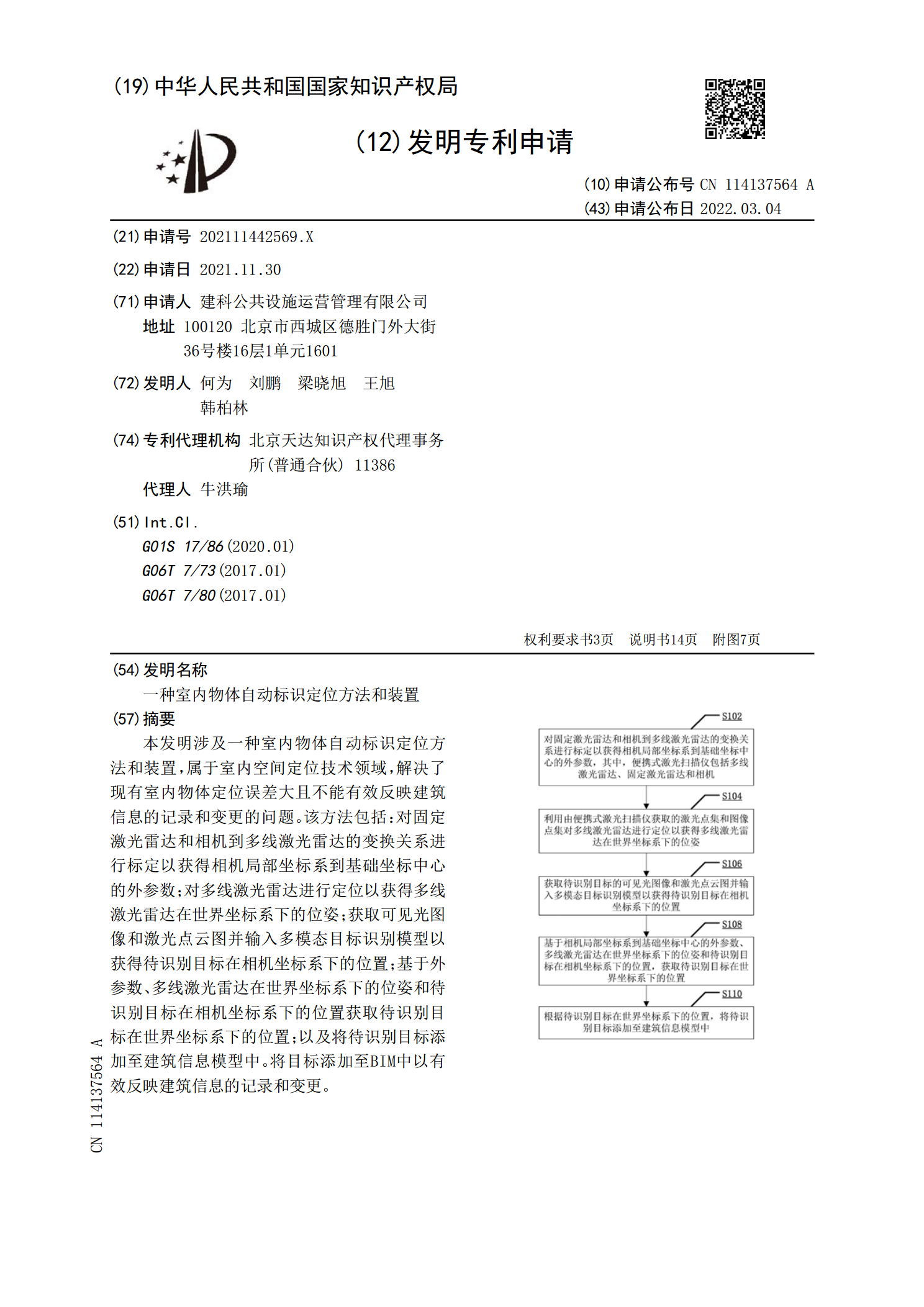
本发明涉及一种室内物体自动标识定位方法和装置,属于室内空间定位技术领域,解决了现有室内物体定位误差大且不能有效反映建筑信息的记录和变更的问题。该方法包括:对固定激光雷达和相机到多线激光雷达的变换关系进行标定以获得相机局部坐标系到基础坐标中心的外参数;对多线激光雷达进行定位以获得多线激光雷达在世界坐标系下的位姿;获取可见光图像和激光点云图并输入多模态目标识别模型以获得待识别目标在相机坐标系下的位置;基于外参数、多线激光雷达在世界坐标系下的位姿和待识别目标在相机坐标系下的位置获取待识别目标在世界坐标系下的位置