
一种基于平面视觉引导机械臂的抓取方法.pdf

康佳****文库

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于平面视觉引导机械臂的抓取方法.pdf
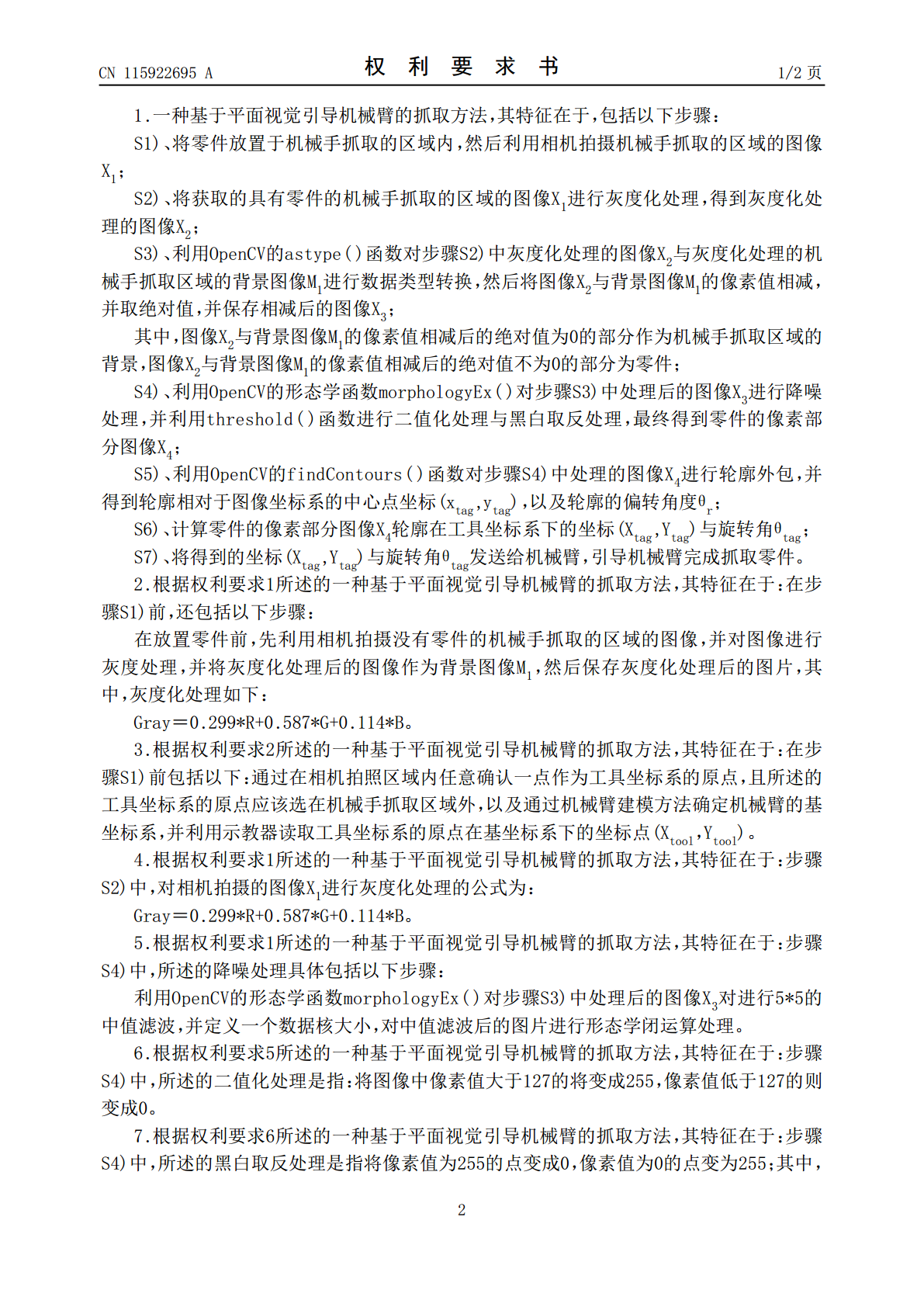
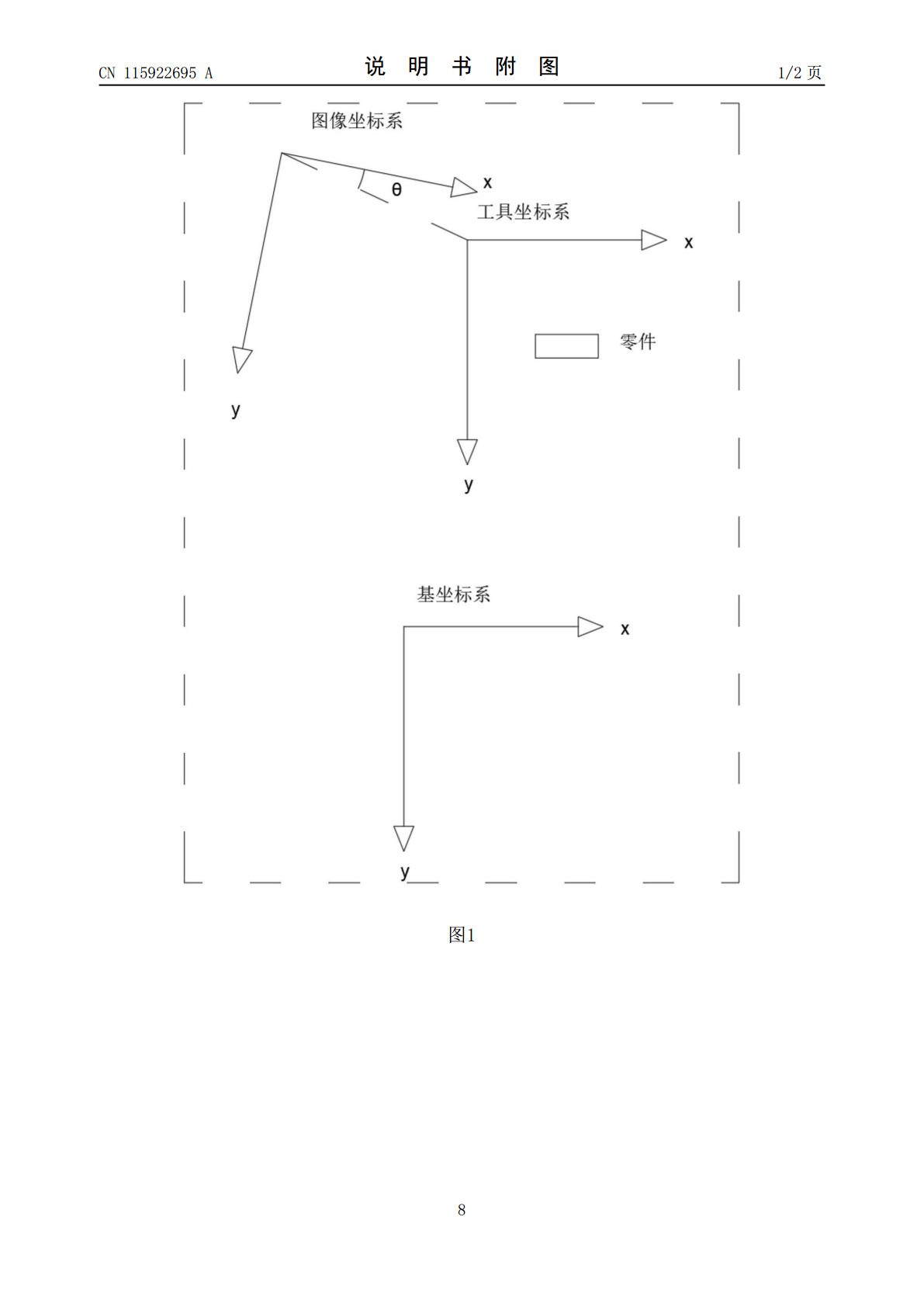
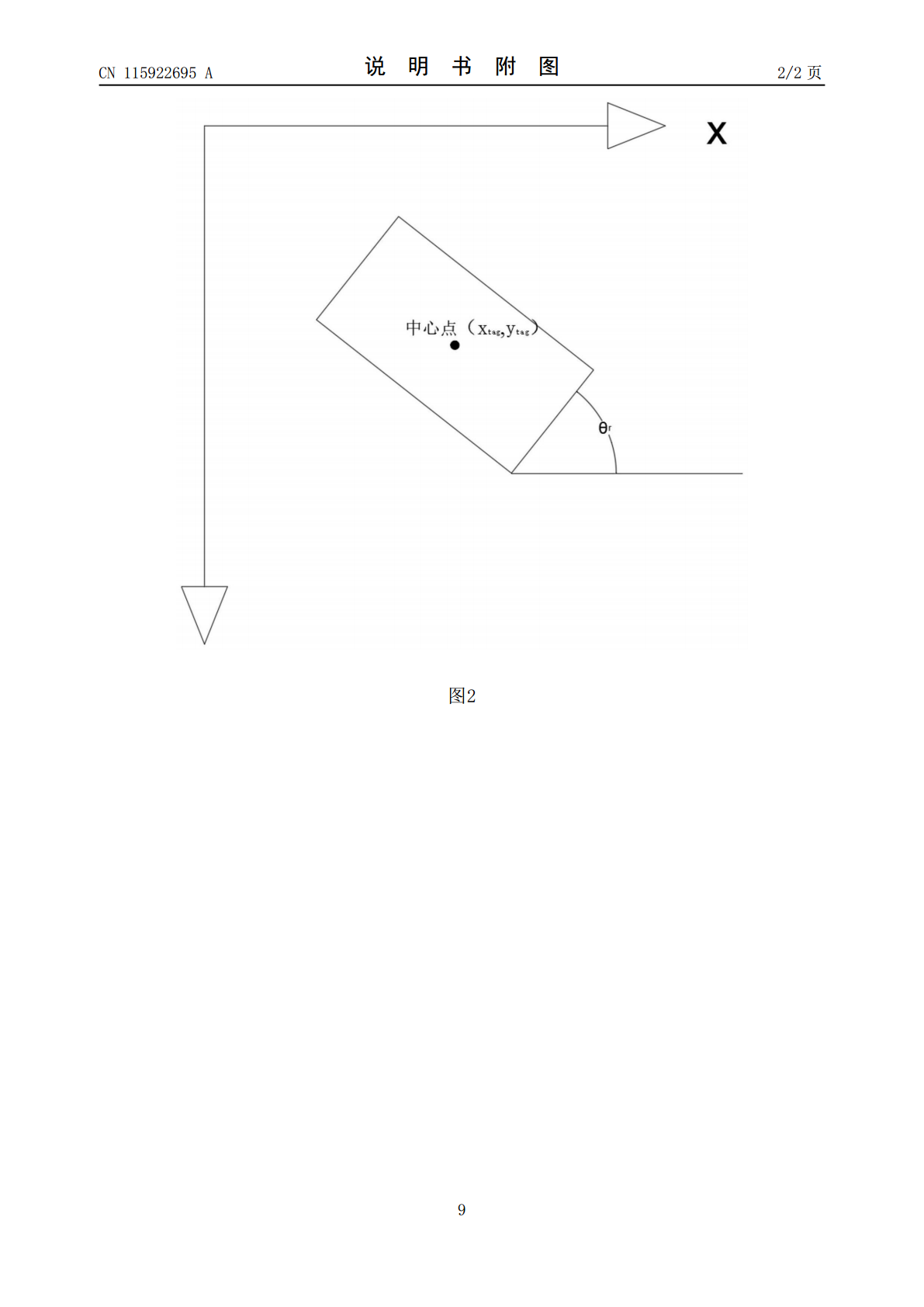
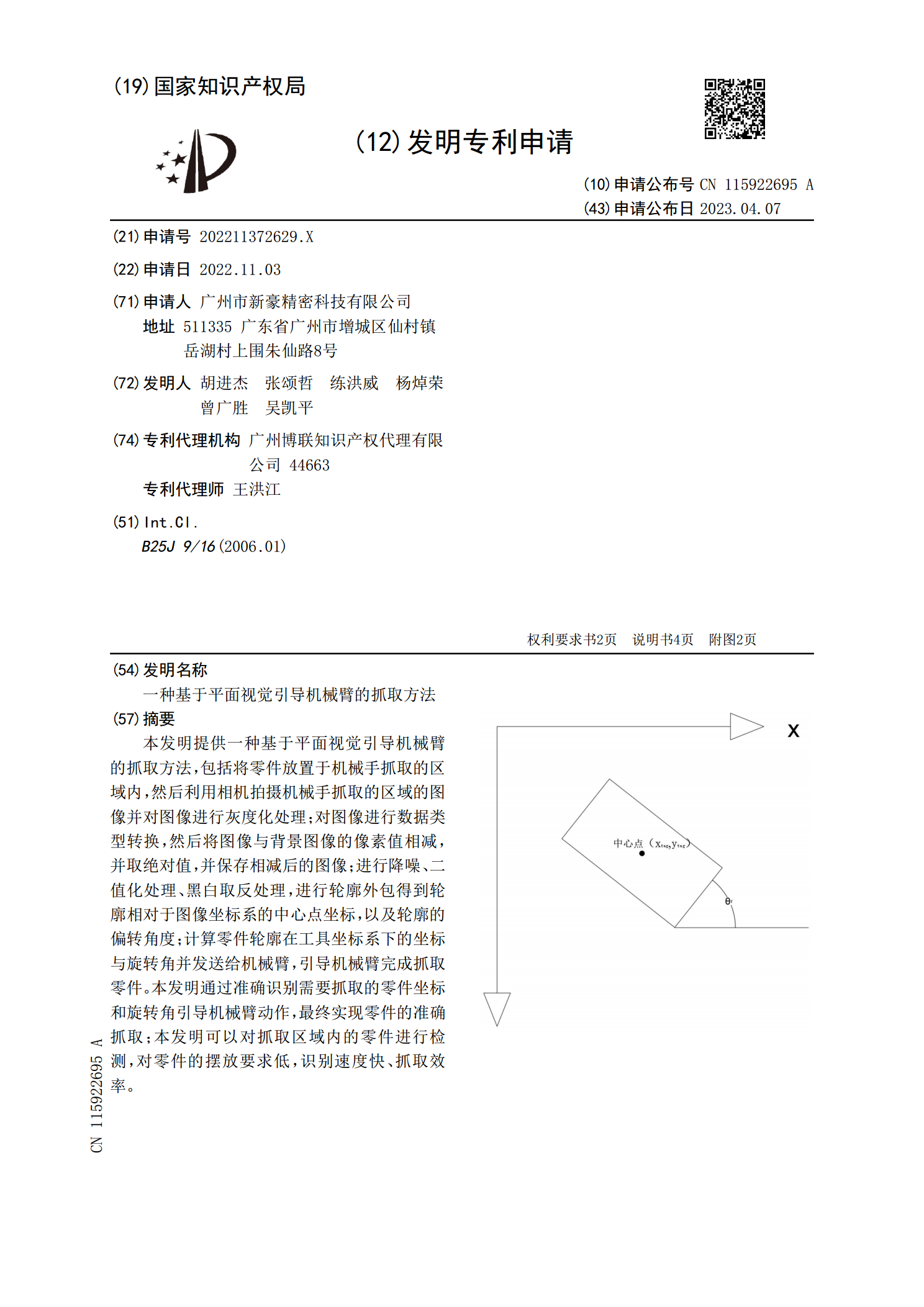
本发明提供一种基于平面视觉引导机械臂的抓取方法,包括将零件放置于机械手抓取的区域内,然后利用相机拍摄机械手抓取的区域的图像并对图像进行灰度化处理;对图像进行数据类型转换,然后将图像与背景图像的像素值相减,并取绝对值,并保存相减后的图像;进行降噪、二值化处理、黑白取反处理,进行轮廓外包得到轮廓相对于图像坐标系的中心点坐标,以及轮廓的偏转角度;计算零件轮廓在工具坐标系下的坐标与旋转角并发送给机械臂,引导机械臂完成抓取零件。本发明通过准确识别需要抓取的零件坐标和旋转角引导机械臂动作,最终实现零件的准确抓取;本发
基于视觉引导机械臂抓取炉具的方法.pdf
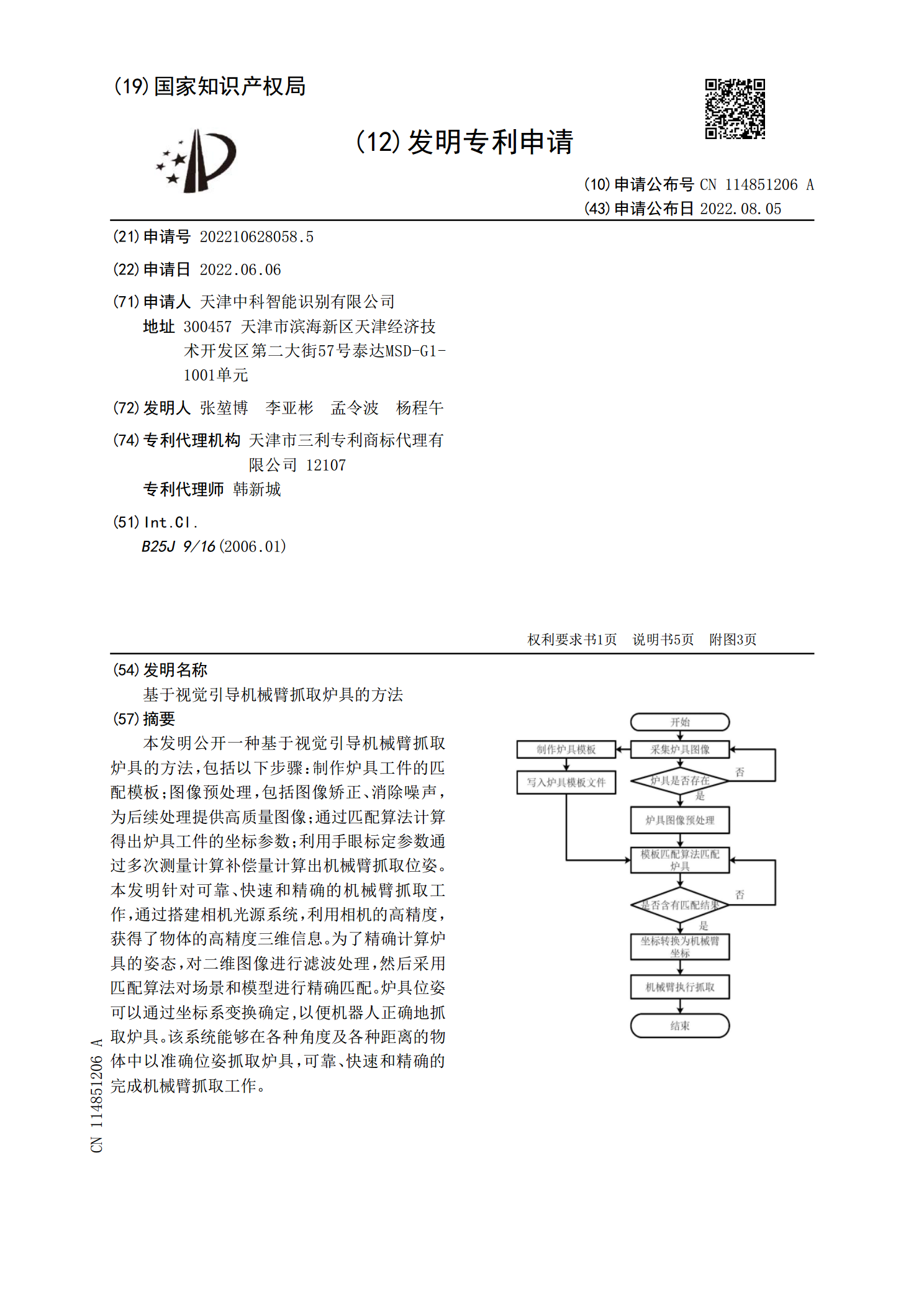
本发明公开一种基于视觉引导机械臂抓取炉具的方法,包括以下步骤:制作炉具工件的匹配模板;图像预处理,包括图像矫正、消除噪声,为后续处理提供高质量图像;通过匹配算法计算得出炉具工件的坐标参数;利用手眼标定参数通过多次测量计算补偿量计算出机械臂抓取位姿。本发明针对可靠、快速和精确的机械臂抓取工作,通过搭建相机光源系统,利用相机的高精度,获得了物体的高精度三维信息。为了精确计算炉具的姿态,对二维图像进行滤波处理,然后采用匹配算法对场景和模型进行精确匹配。炉具位姿可以通过坐标系变换确定,以便机器人正确地抓取炉具。该

基于视觉引导的机械臂抓取系统研究.docx
基于视觉引导的机械臂抓取系统研究基于视觉引导的机械臂抓取系统研究摘要:近年来,随着机器视觉技术的不断发展和应用需求的增加,视觉引导的机械臂抓取系统逐渐成为研究的热点。本文以视觉引导的机械臂抓取系统为研究对象,结合现有技术和方法进行综述和分析,并提出了一种基于视觉引导的机械臂抓取系统的实现方案。研究结果表明,基于视觉引导的机械臂抓取系统具有较高的准确性和灵活性,可以广泛应用于制造业、仓储物流、医疗等领域,并具有很大的研究和应用价值。关键词:机械臂;抓取系统;视觉引导;准确性;灵活性1.引言机械臂是一种能够模

基于视觉引导的机械臂抓取系统研究的开题报告.docx
基于视觉引导的机械臂抓取系统研究的开题报告一、选题背景及意义随着机器人技术的不断发展,机械臂在工业、医疗、服务等领域的应用越来越广泛。机械臂抓取系统是机械臂中非常重要的一项核心技术,其作用主要是完成对物体的精准抓取。传统的机械臂抓取系统大多采用基于位置和力的控制方法,这些方法需要精细的图像定位和模型匹配。而现在随着计算机视觉技术的飞速发展,基于视觉引导的机械臂抓取系统正逐渐成为研究热点。其主要特点是利用深度学习和计算机视觉技术,通过分析物体表面的关键特征点进行判断,从而实现物体的定位、抓取和放置。基于视觉
一种基于双目视觉的机械臂抓取控制方法.pdf
本发明的技术方案是这样实现的:一种基于双目视觉的机械臂抓取控制方法,其特征在于,包括如下步骤:S1安装:将机械臂安装到工作台上,调节机械臂的位置和角度,基于机械臂的主控计算机与视觉处理单元进行调试,位置调试完成后等待抓取;S2抓取:在调试完成后,机械臂的抓取单元与零件对准,通过夹持与吸附同时进行的方式对零件进行抓取;S3拨动清理:在机械臂难以对零件进行抓取时,通过吹气的方式或拨动的方式改变零件的状态使其便于抓取工作;在抓取完成后,吹过吹气和毛刷对工作台进行清理;本发明本发明抓取零件方便稳定,工作效率高,能