
基于视觉定位的冷轧厂轧辊的自动抓取方法.pdf

子安****吖吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于视觉定位的冷轧厂轧辊的自动抓取方法.pdf
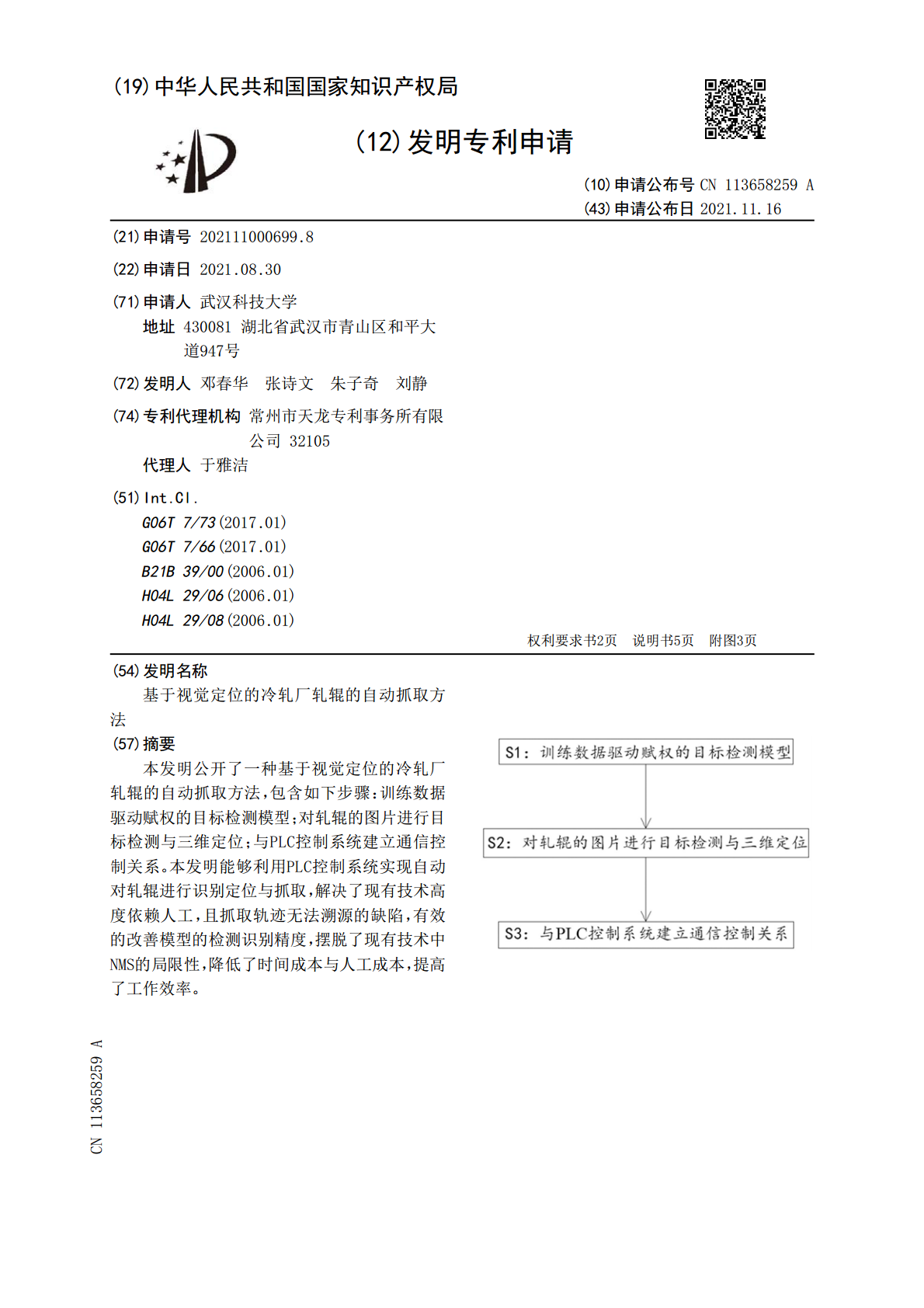
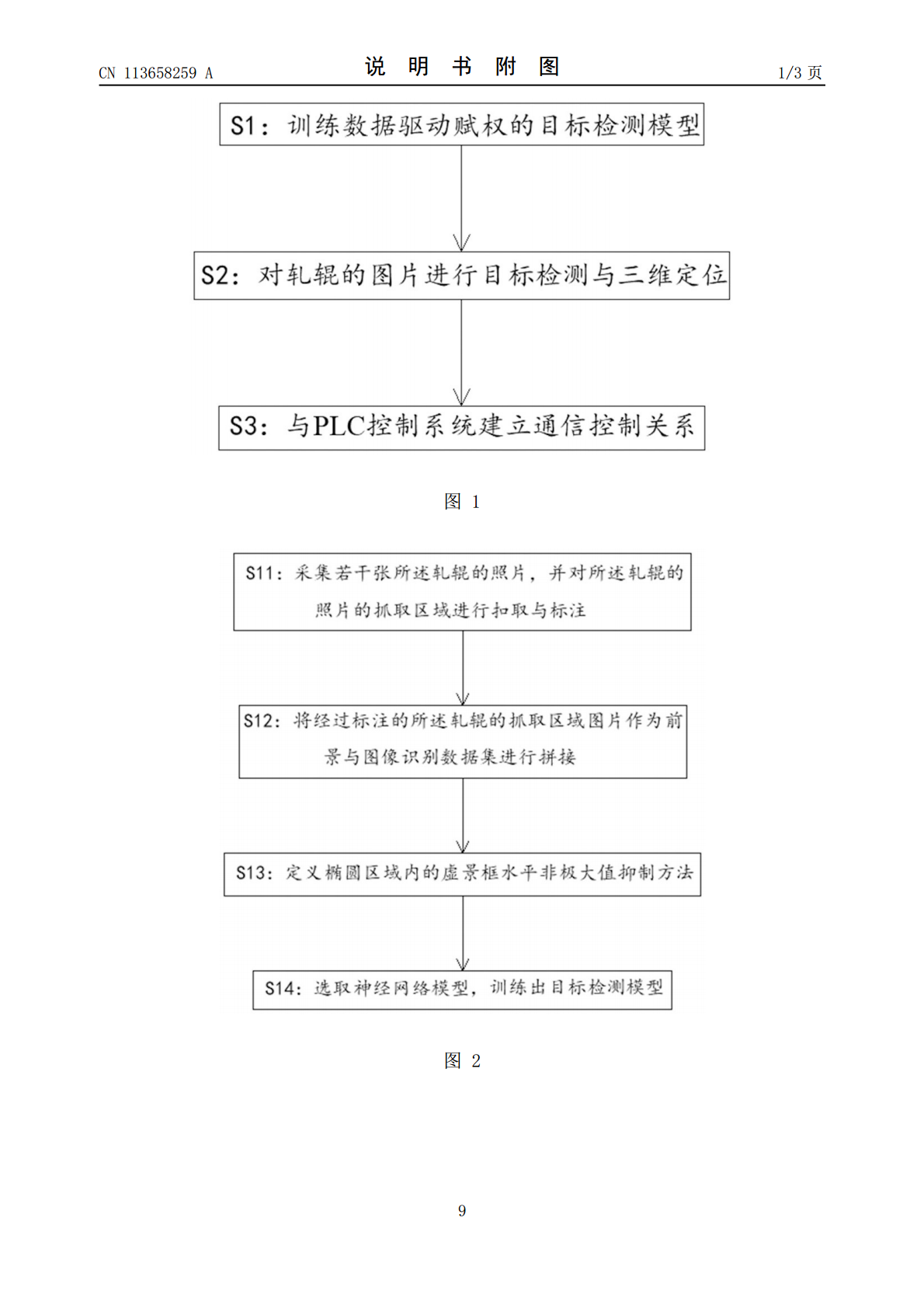
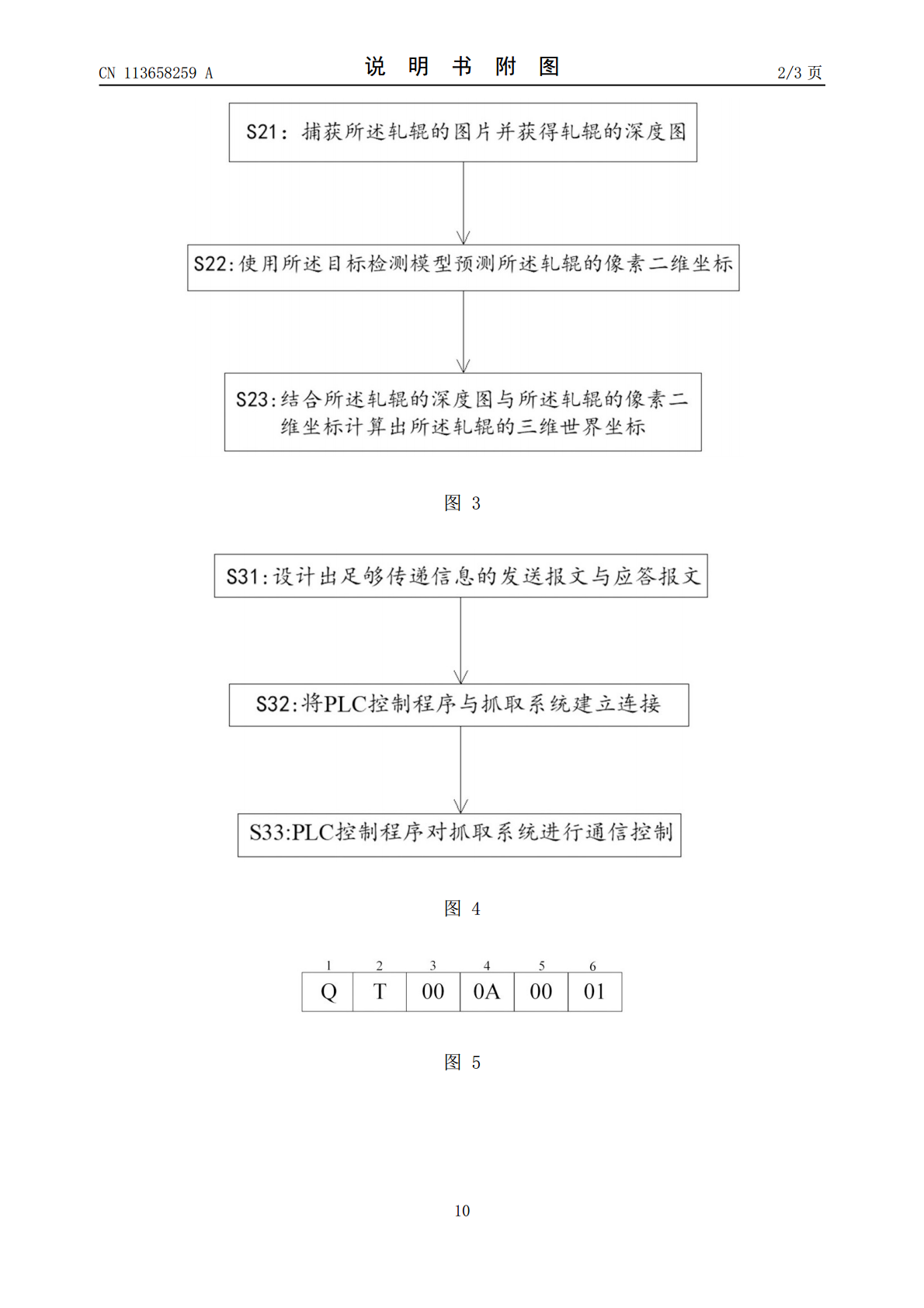
本发明公开了一种基于视觉定位的冷轧厂轧辊的自动抓取方法,包含如下步骤:训练数据驱动赋权的目标检测模型;对轧辊的图片进行目标检测与三维定位;与PLC控制系统建立通信控制关系。本发明能够利用PLC控制系统实现自动对轧辊进行识别定位与抓取,解决了现有技术高度依赖人工,且抓取轨迹无法溯源的缺陷,有效的改善模型的检测识别精度,摆脱了现有技术中NMS的局限性,降低了时间成本与人工成本,提高了工作效率。
一种基于视觉定位的平面物体自动抓取摆放装置和方法.pdf
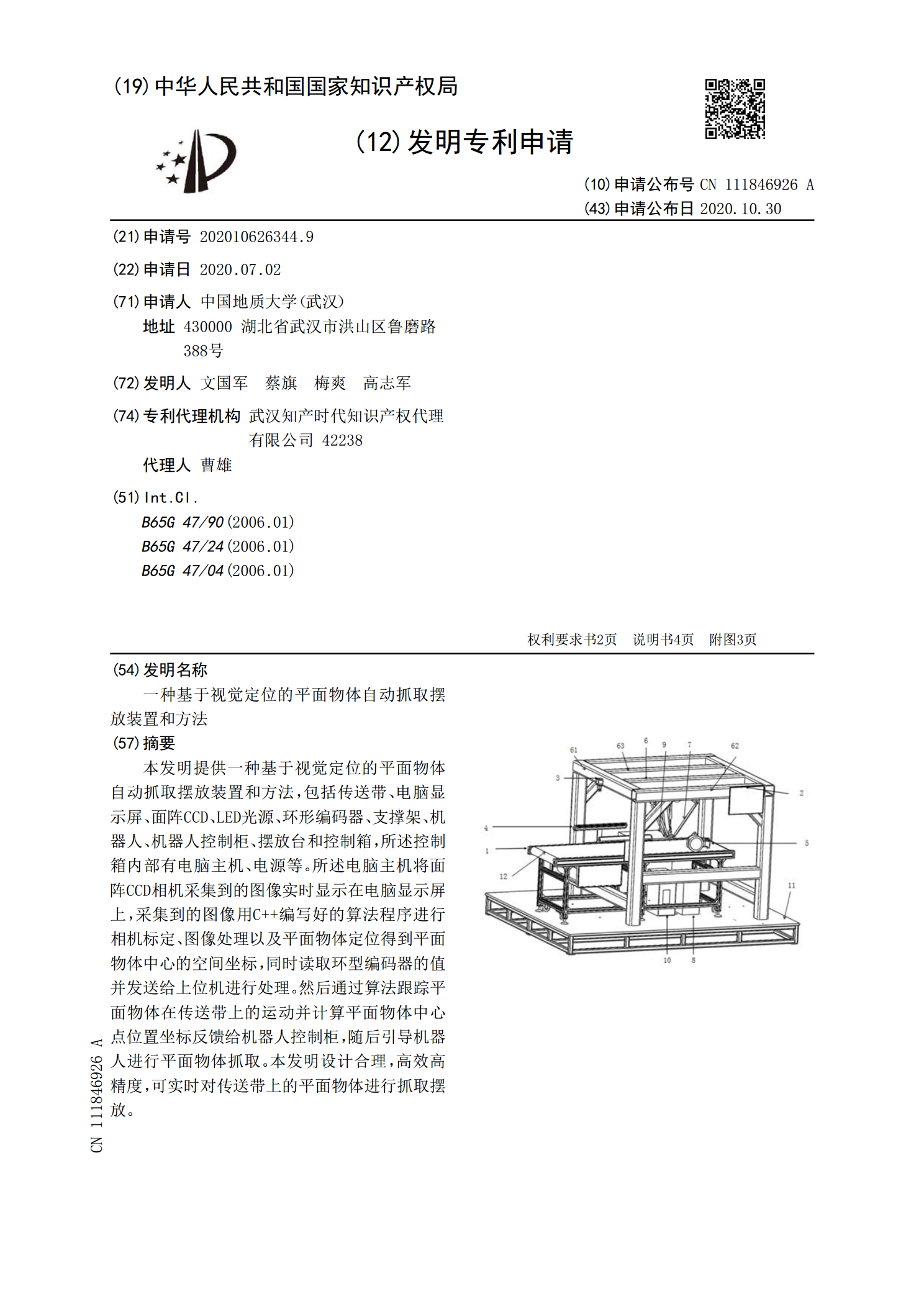
本发明提供一种基于视觉定位的平面物体自动抓取摆放装置和方法,包括传送带、电脑显示屏、面阵CCD、LED光源、环形编码器、支撑架、机器人、机器人控制柜、摆放台和控制箱,所述控制箱内部有电脑主机、电源等。所述电脑主机将面阵CCD相机采集到的图像实时显示在电脑显示屏上,采集到的图像用C++编写好的算法程序进行相机标定、图像处理以及平面物体定位得到平面物体中心的空间坐标,同时读取环型编码器的值并发送给上位机进行处理。然后通过算法跟踪平面物体在传送带上的运动并计算平面物体中心点位置坐标反馈给机器人控制柜,随后引导机
基于3D视觉的机器人自动抓取系统及方法.pdf
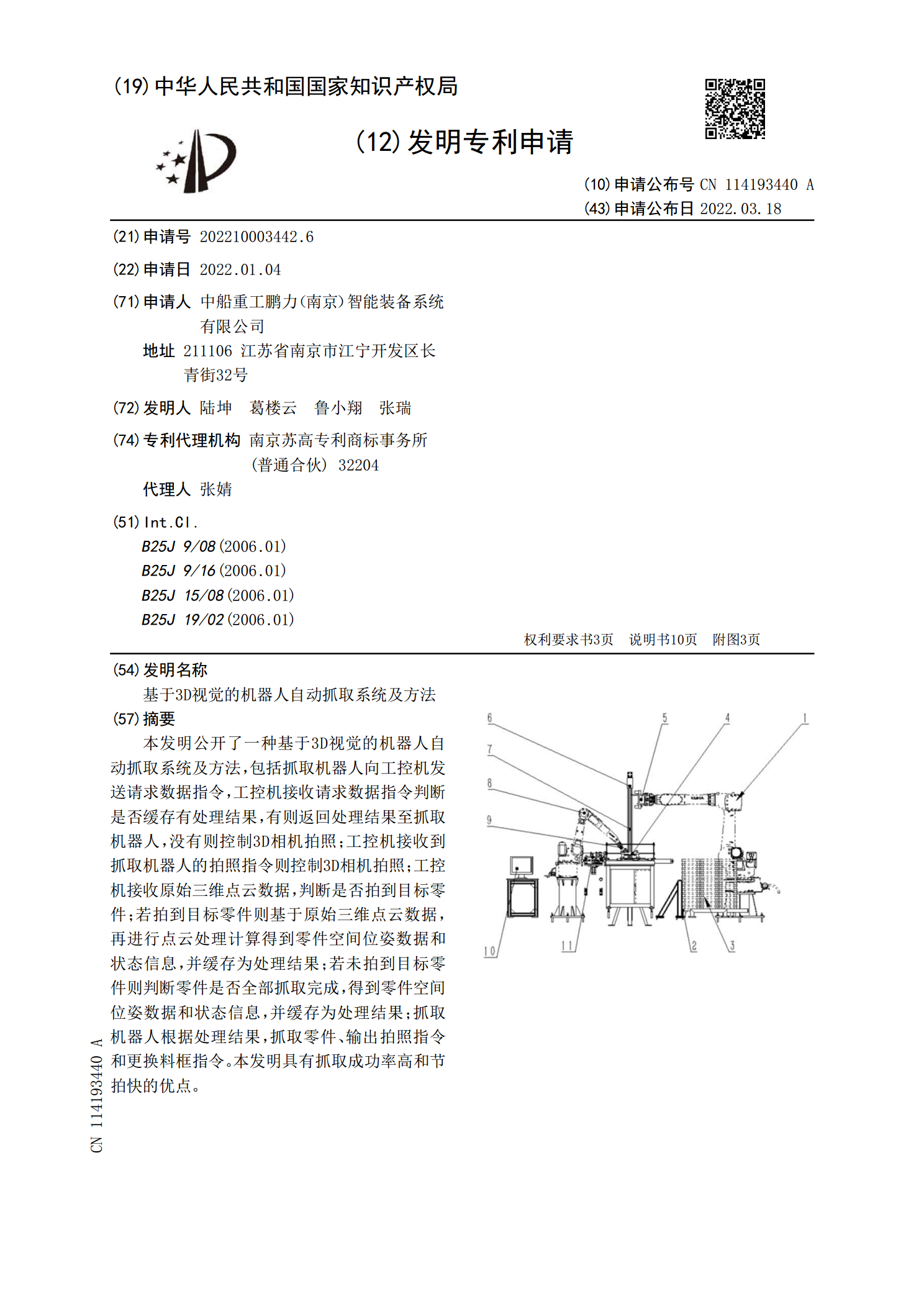
本发明公开了一种基于3D视觉的机器人自动抓取系统及方法,包括抓取机器人向工控机发送请求数据指令,工控机接收请求数据指令判断是否缓存有处理结果,有则返回处理结果至抓取机器人,没有则控制3D相机拍照;工控机接收到抓取机器人的拍照指令则控制3D相机拍照;工控机接收原始三维点云数据,判断是否拍到目标零件;若拍到目标零件则基于原始三维点云数据,再进行点云处理计算得到零件空间位姿数据和状态信息,并缓存为处理结果;若未拍到目标零件则判断零件是否全部抓取完成,得到零件空间位姿数据和状态信息,并缓存为处理结果;抓取机器人根

冷轧辊自动抛光机.pdf
本发明的冷轧辊自动抛光机,其特征是:包括依次连接的油石、油石移动装置和油石复位装置,还包括连接油石移动装置的油石顶紧装置,油石紧贴轧辊表面。油石移动装置包括滑动轴和滑动块,还包括一侧逐渐凸出的摩擦轮、与摩擦轮对应的斜坡块。油石顶紧装置包括推块、推力簧和簧座。油石顶紧装置还包括调整螺钉、调整螺母和垫块。油石复位装置包括限位螺柱和复位簧。本发明的有益效果是,解放了一定的劳动力,使用方便、安全,自动化程度高,结构简单、小巧,制造成本低,不需要使用电机带动,节约电能和使用成本。
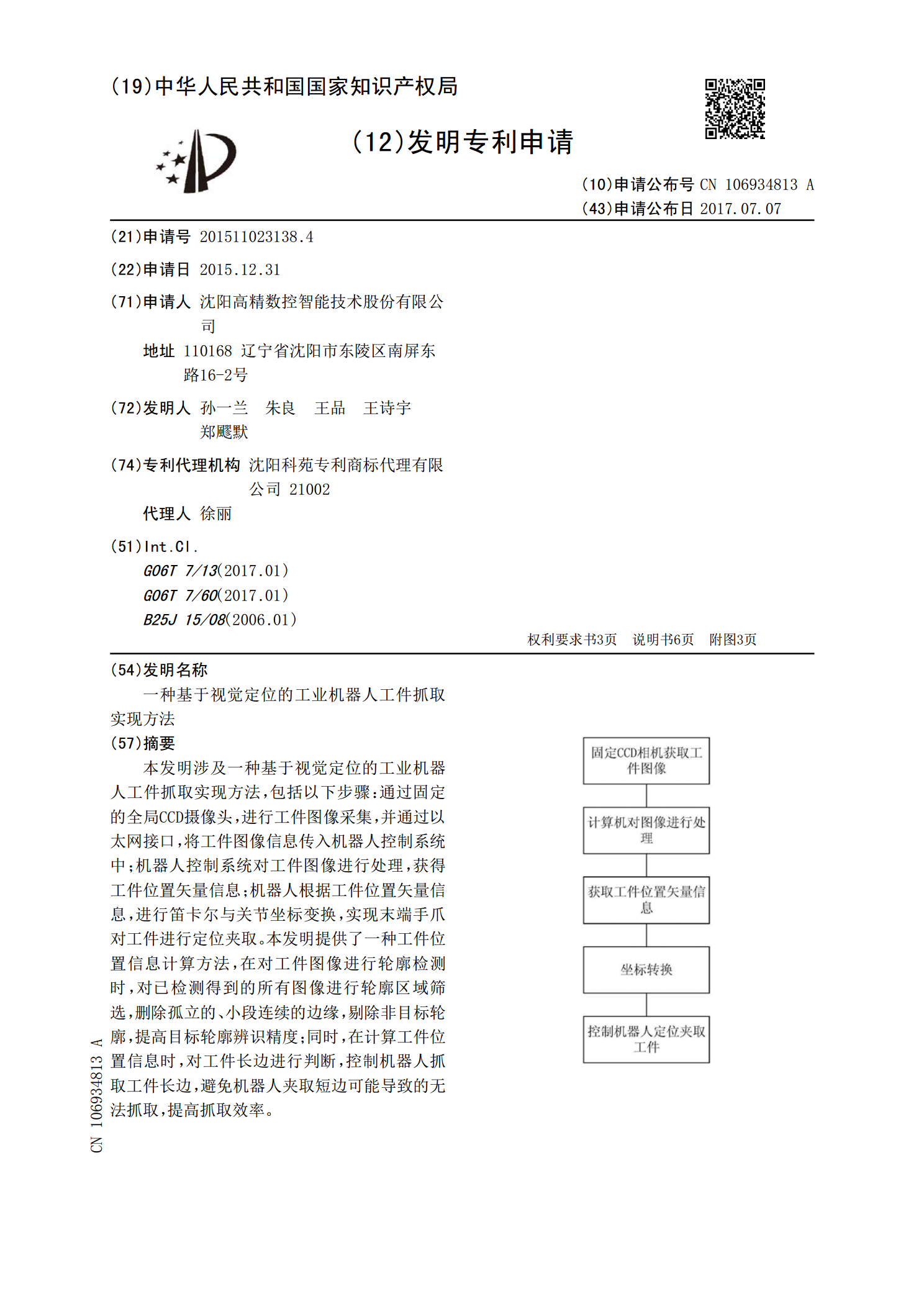
一种基于视觉定位的工业机器人工件抓取实现方法.pdf
本发明涉及一种基于视觉定位的工业机器人工件抓取实现方法,包括以下步骤:通过固定的全局CCD摄像头,进行工件图像采集,并通过以太网接口,将工件图像信息传入机器人控制系统中;机器人控制系统对工件图像进行处理,获得工件位置矢量信息;机器人根据工件位置矢量信息,进行笛卡尔与关节坐标变换,实现末端手爪对工件进行定位夹取。本发明提供了一种工件位置信息计算方法,在对工件图像进行轮廓检测时,对已检测得到的所有图像进行轮廓区域筛选,删除孤立的、小段连续的边缘,剔除非目标轮廓,提高目标轮廓辨识精度;同时,在计算工件位置信息时