
一种室内物体自动标识定位方法和装置.pdf

一吃****继勇

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种室内物体自动标识定位方法和装置.pdf
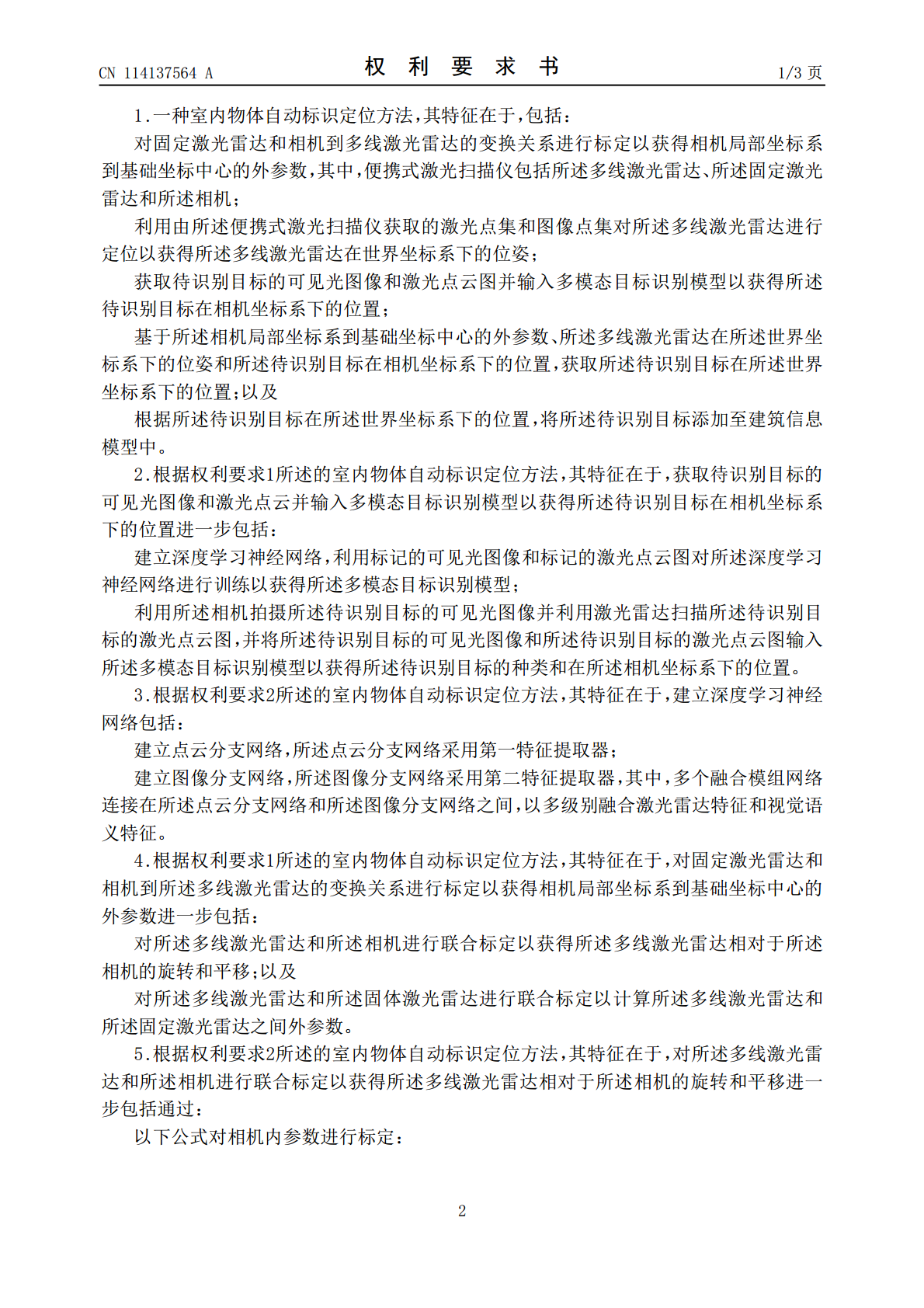
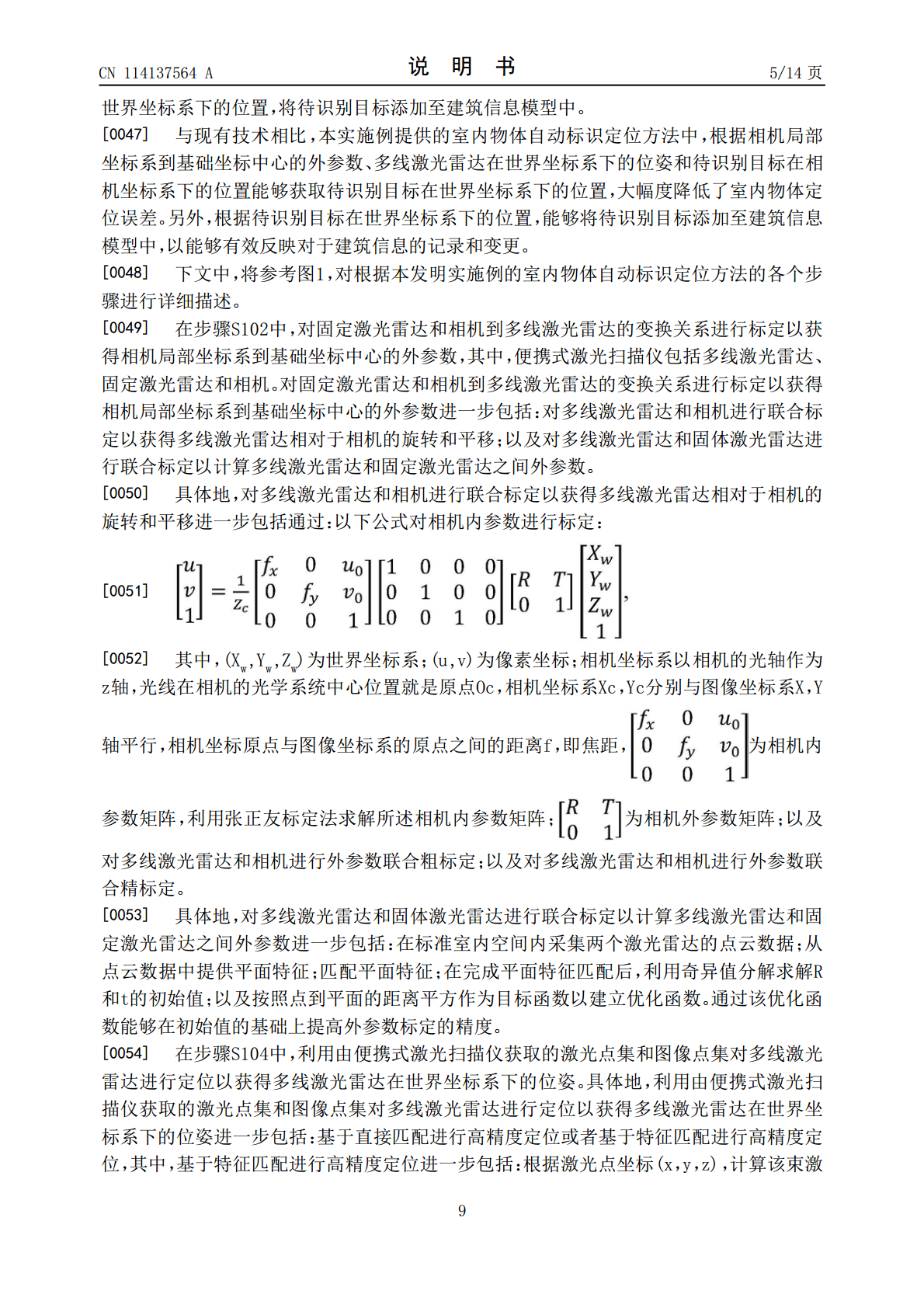
本发明涉及一种室内物体自动标识定位方法和装置,属于室内空间定位技术领域,解决了现有室内物体定位误差大且不能有效反映建筑信息的记录和变更的问题。该方法包括:对固定激光雷达和相机到多线激光雷达的变换关系进行标定以获得相机局部坐标系到基础坐标中心的外参数;对多线激光雷达进行定位以获得多线激光雷达在世界坐标系下的位姿;获取可见光图像和激光点云图并输入多模态目标识别模型以获得待识别目标在相机坐标系下的位置;基于外参数、多线激光雷达在世界坐标系下的位姿和待识别目标在相机坐标系下的位置获取待识别目标在世界坐标系下的位置
物体定位方法和装置.pdf
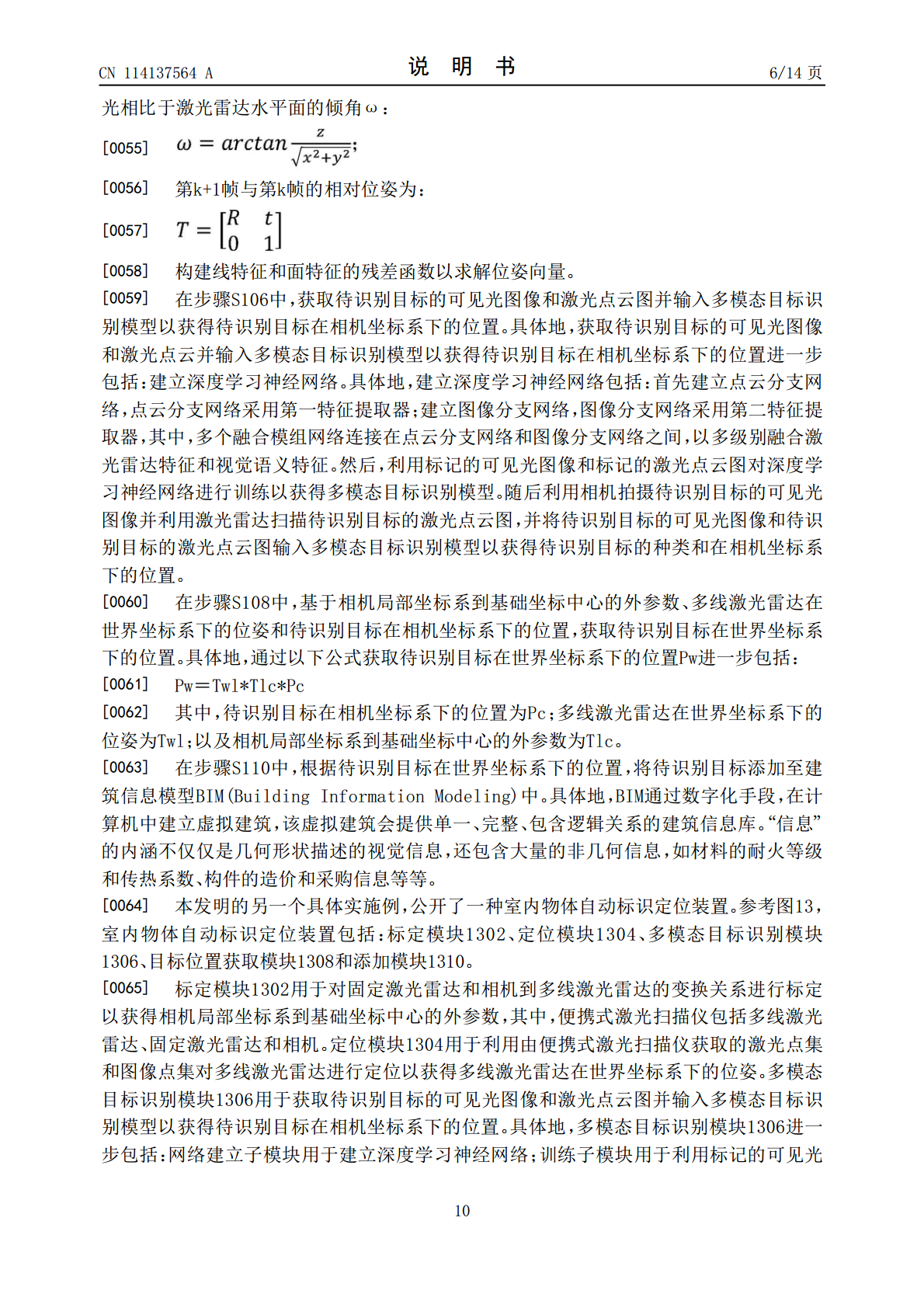
本发明提出一种物体定位方法和装置,其中,方法包括:获取物体的目标图像,确定目标图像对应的各概率密度函数的目标参数值,根据各概率密度函数的目标参数值,生成混合概率密度函数,根据混合概率密度函数,确定目标图像中物体的目标位置。通过将模型学习各图像特征与各概率密度函数的参数值之间的映射关系,与概率密度函数确定物体位置相结合,解决了相关技术中仅能够对图像中符合固定个数的物体进行准确定位的技术问题,同时扩展了应用场景,提高了定位的效率。
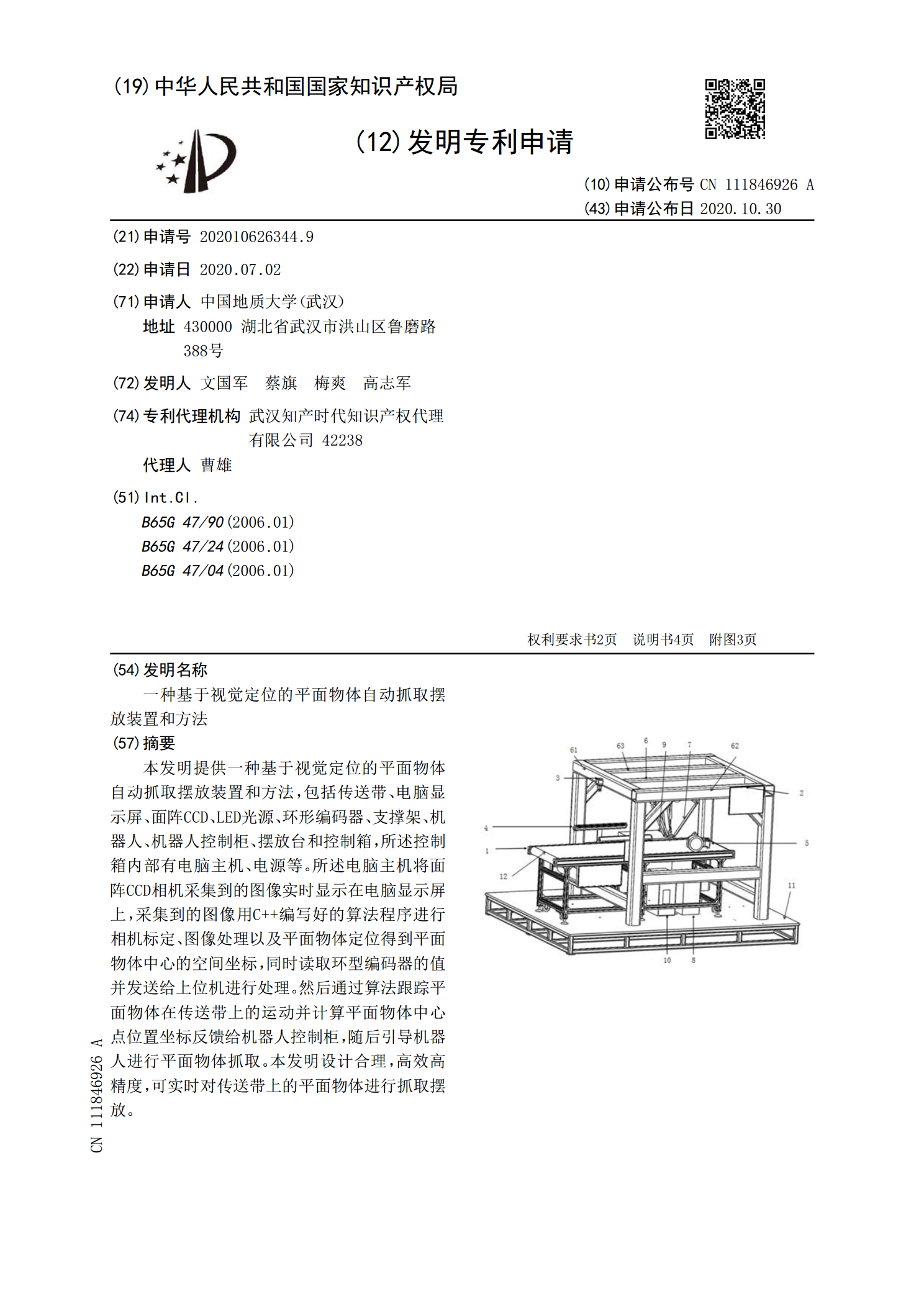
一种基于视觉定位的平面物体自动抓取摆放装置和方法.pdf
本发明提供一种基于视觉定位的平面物体自动抓取摆放装置和方法,包括传送带、电脑显示屏、面阵CCD、LED光源、环形编码器、支撑架、机器人、机器人控制柜、摆放台和控制箱,所述控制箱内部有电脑主机、电源等。所述电脑主机将面阵CCD相机采集到的图像实时显示在电脑显示屏上,采集到的图像用C++编写好的算法程序进行相机标定、图像处理以及平面物体定位得到平面物体中心的空间坐标,同时读取环型编码器的值并发送给上位机进行处理。然后通过算法跟踪平面物体在传送带上的运动并计算平面物体中心点位置坐标反馈给机器人控制柜,随后引导机
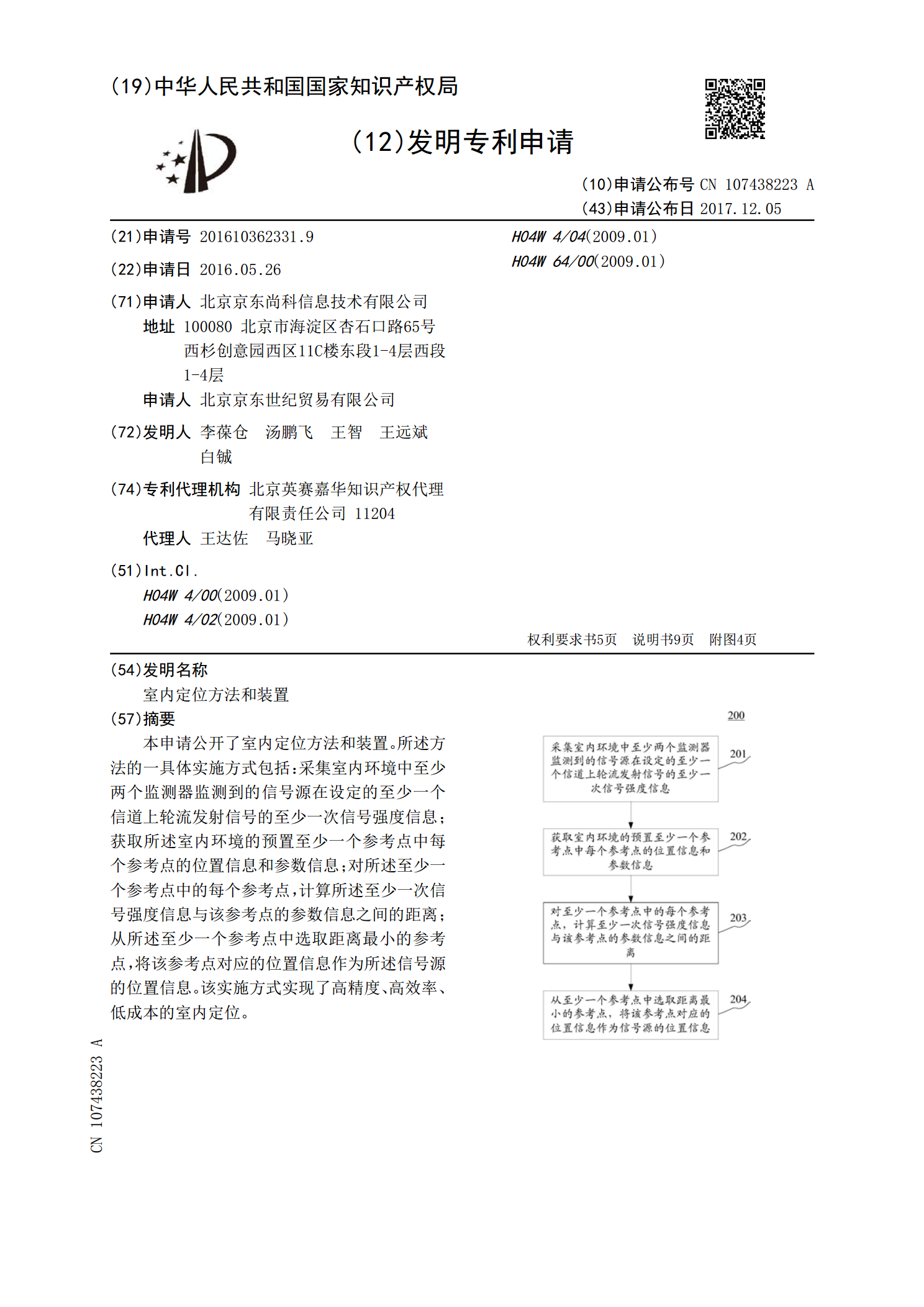
室内定位方法和装置.pdf
本申请公开了室内定位方法和装置。所述方法的一具体实施方式包括:采集室内环境中至少两个监测器监测到的信号源在设定的至少一个信道上轮流发射信号的至少一次信号强度信息;获取所述室内环境的预置至少一个参考点中每个参考点的位置信息和参数信息;对所述至少一个参考点中的每个参考点,计算所述至少一次信号强度信息与该参考点的参数信息之间的距离;从所述至少一个参考点中选取距离最小的参考点,将该参考点对应的位置信息作为所述信号源的位置信息。该实施方式实现了高精度、高效率、低成本的室内定位。
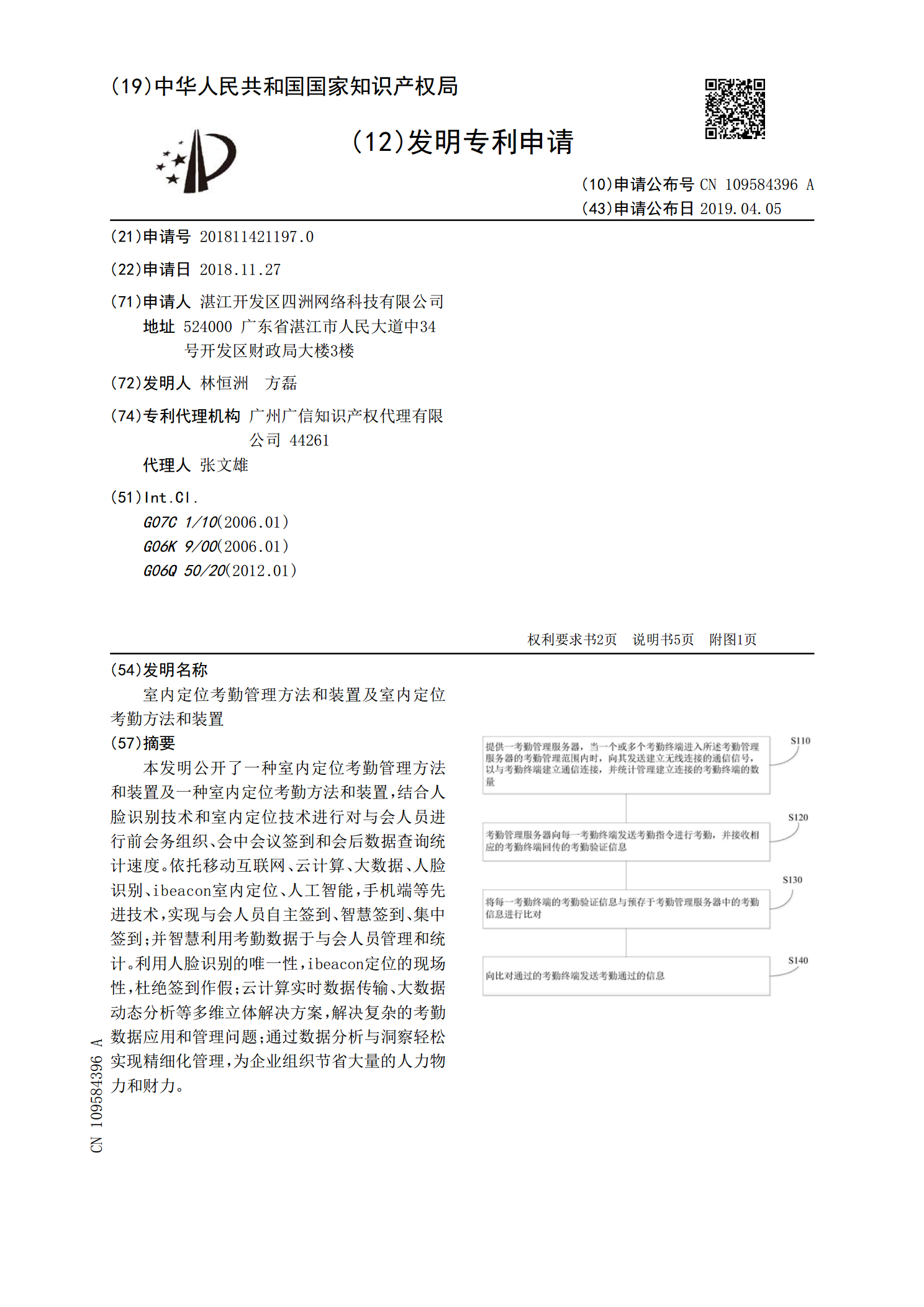
室内定位考勤管理方法和装置及室内定位考勤方法和装置.pdf
本发明公开了一种室内定位考勤管理方法和装置及一种室内定位考勤方法和装置,结合人脸识别技术和室内定位技术进行对与会人员进行前会务组织、会中会议签到和会后数据查询统计速度。依托移动互联网、云计算、大数据、人脸识别、ibeacon室内定位、人工智能,手机端等先进技术,实现与会人员自主签到、智慧签到、集中签到;并智慧利用考勤数据于与会人员管理和统计。利用人脸识别的唯一性,ibeacon定位的现场性,杜绝签到作假;云计算实时数据传输、大数据动态分析等多维立体解决方案,解决复杂的考勤数据应用和管理问题;通过数据分析与