
一种自动化工业机器人追踪抓取机构.pdf

书生****写意


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动化工业机器人追踪抓取机构.pdf
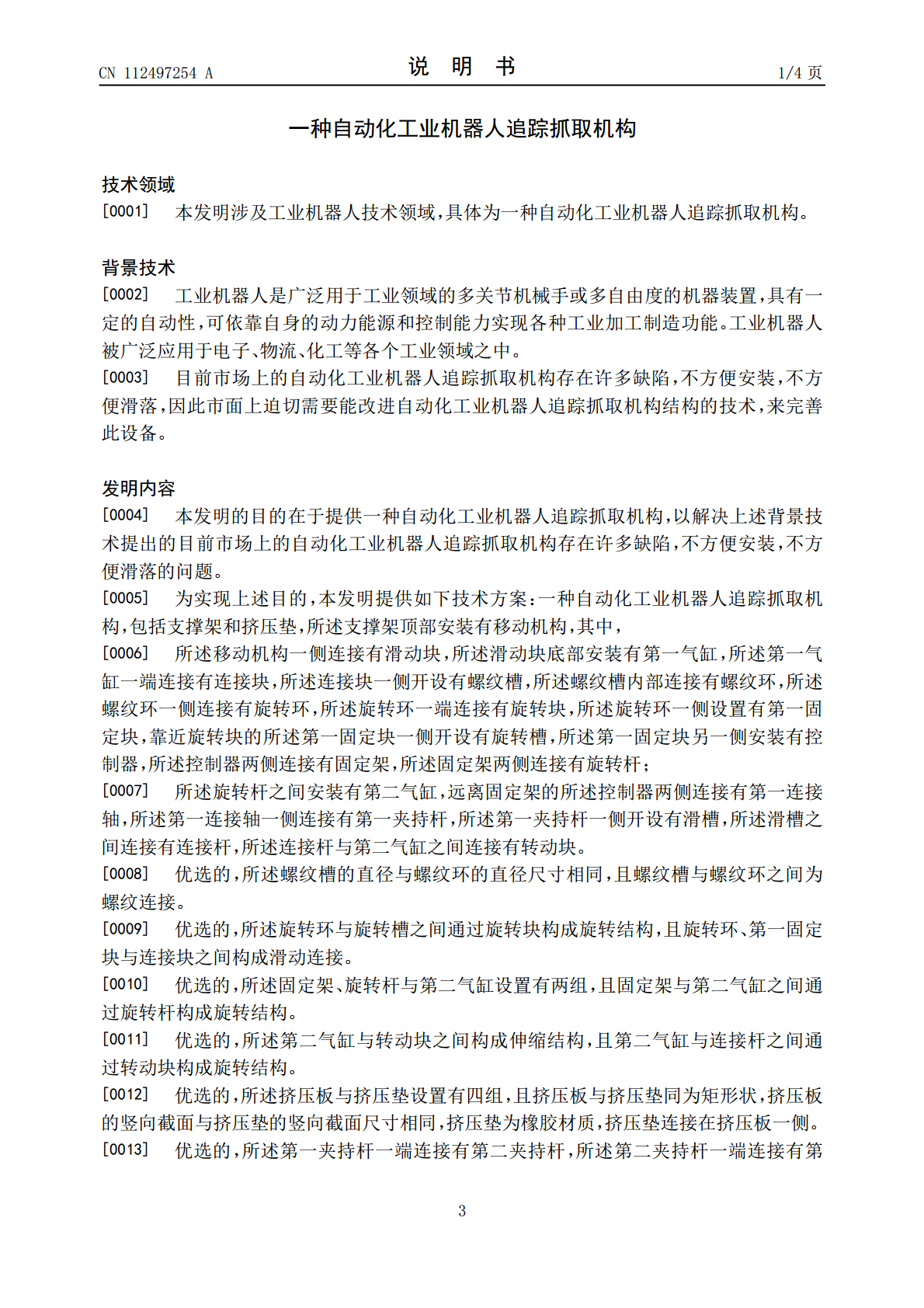
本发明公开了一种自动化工业机器人追踪抓取机构,包括支撑架和挤压垫,所述支撑架顶部安装有移动机构,其中,所述移动机构一侧连接有滑动块,所述滑动块底部安装有第一气缸,所述第一气缸一端连接有连接块,所述连接块一侧开设有螺纹槽。该自动化工业机器人追踪抓取机构设置有旋转环能够通过拉动第一固定块与连接块进行对接滑动,以便旋转环、第一固定块与连接块滑动时旋转环可以带动螺纹环与螺纹槽进行对接,螺纹环与螺纹槽对接时可以转动旋转环可以带动旋转块与旋转槽进行旋转,旋转环转动的同时可以带动螺纹环与螺纹槽进行螺纹滑动,当螺纹环螺纹
一种自动抓取机构.pdf
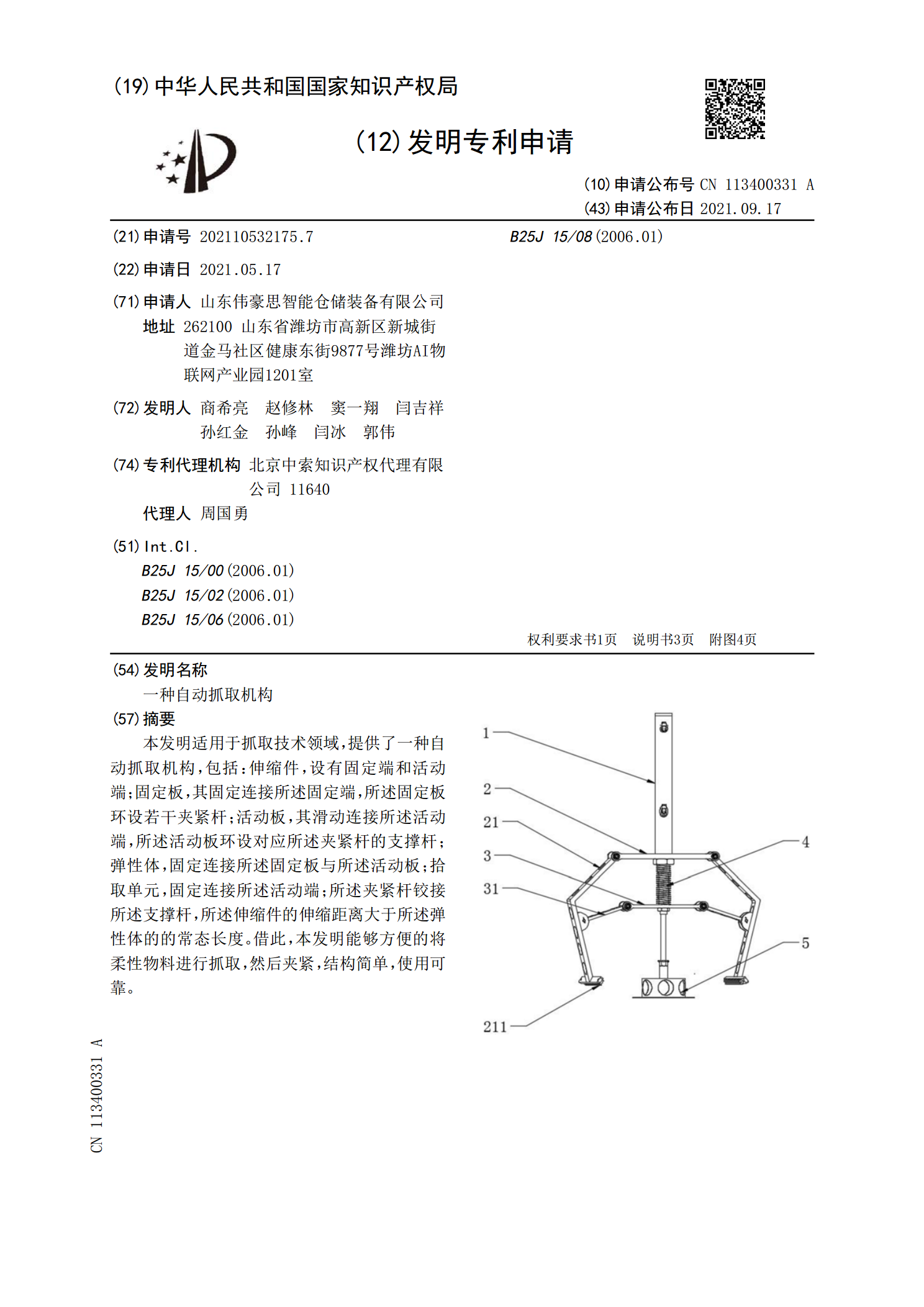
本发明适用于抓取技术领域,提供了一种自动抓取机构,包括:伸缩件,设有固定端和活动端;固定板,其固定连接所述固定端,所述固定板环设若干夹紧杆;活动板,其滑动连接所述活动端,所述活动板环设对应所述夹紧杆的支撑杆;弹性体,固定连接所述固定板与所述活动板;拾取单元,固定连接所述活动端;所述夹紧杆铰接所述支撑杆,所述伸缩件的伸缩距离大于所述弹性体的的常态长度。借此,本发明能够方便的将柔性物料进行抓取,然后夹紧,结构简单,使用可靠。
一种自动抓取机构.pdf
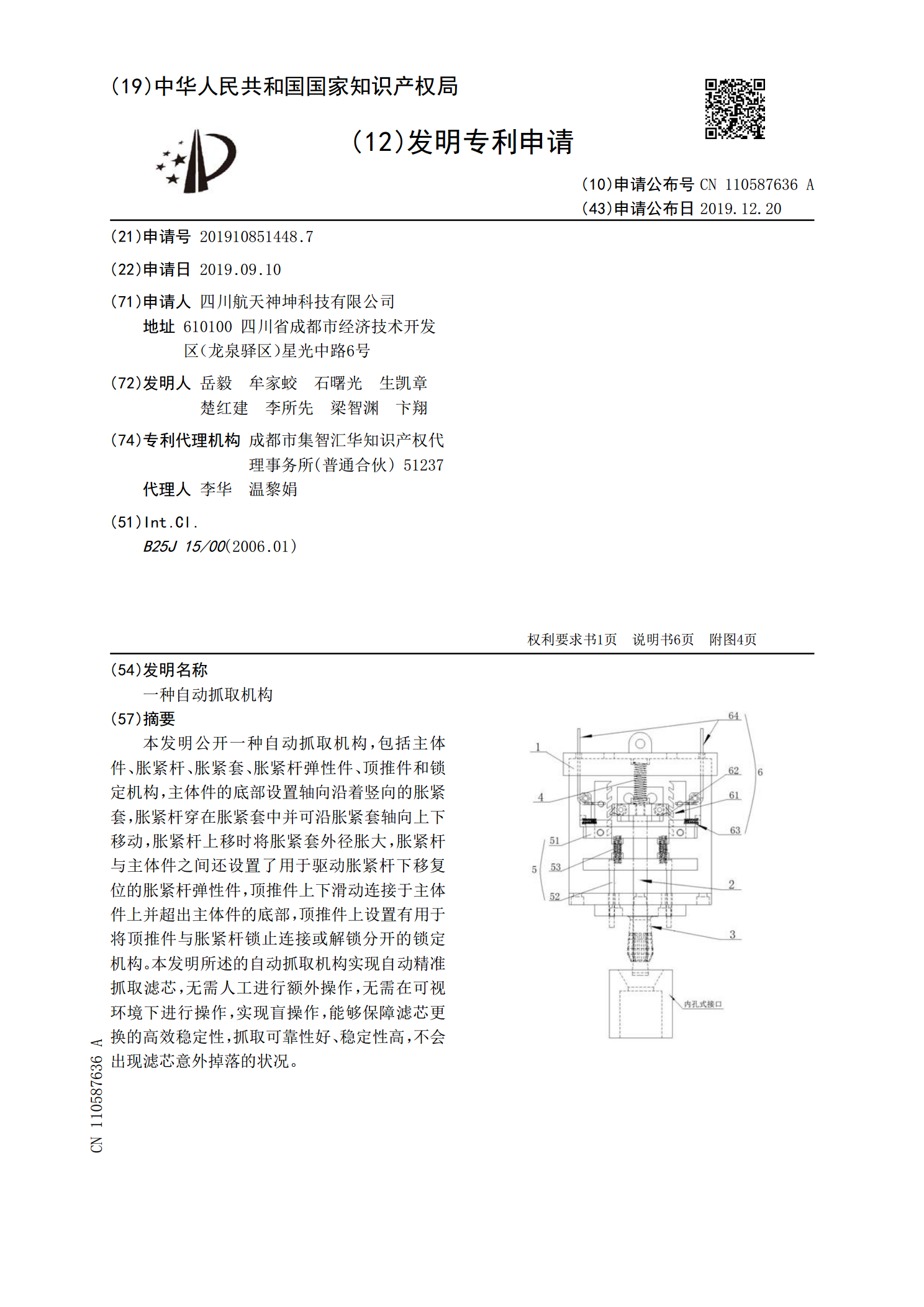
本发明公开一种自动抓取机构,包括主体件、胀紧杆、胀紧套、胀紧杆弹性件、顶推件和锁定机构,主体件的底部设置轴向沿着竖向的胀紧套,胀紧杆穿在胀紧套中并可沿胀紧套轴向上下移动,胀紧杆上移时将胀紧套外径胀大,胀紧杆与主体件之间还设置了用于驱动胀紧杆下移复位的胀紧杆弹性件,顶推件上下滑动连接于主体件上并超出主体件的底部,顶推件上设置有用于将顶推件与胀紧杆锁止连接或解锁分开的锁定机构。本发明所述的自动抓取机构实现自动精准抓取滤芯,无需人工进行额外操作,无需在可视环境下进行操作,实现盲操作,能够保障滤芯更换的高效稳定性

一种自动覆膜机的抓取机构.pdf
本发明提供了一种自动覆膜机的抓取机构,属于机械技术领域。它解决了现有技术中抓取效果差的问题。本自动覆膜机的抓取机构,自动覆膜机包括工作台,工作台上设有输送带,输送带具有进料端和下料端,本抓取机构设置在输送带一侧,包括固定架和滑轨,固定架固定在工台的一侧,滑轨固定在固定架上,滑轨上滑动设有滑动块三和滑动块四,滑轨一端固定有电机三,电机三的输出轴上同轴固定有皮带轮一,滑轨的另一端转动设有皮带轮二,皮带轮一与皮带轮二之间通过皮带相连接,滑块三与皮带相固定,滑块四与皮带相固定,滑动块三上固定有抓取组件一。本发明具
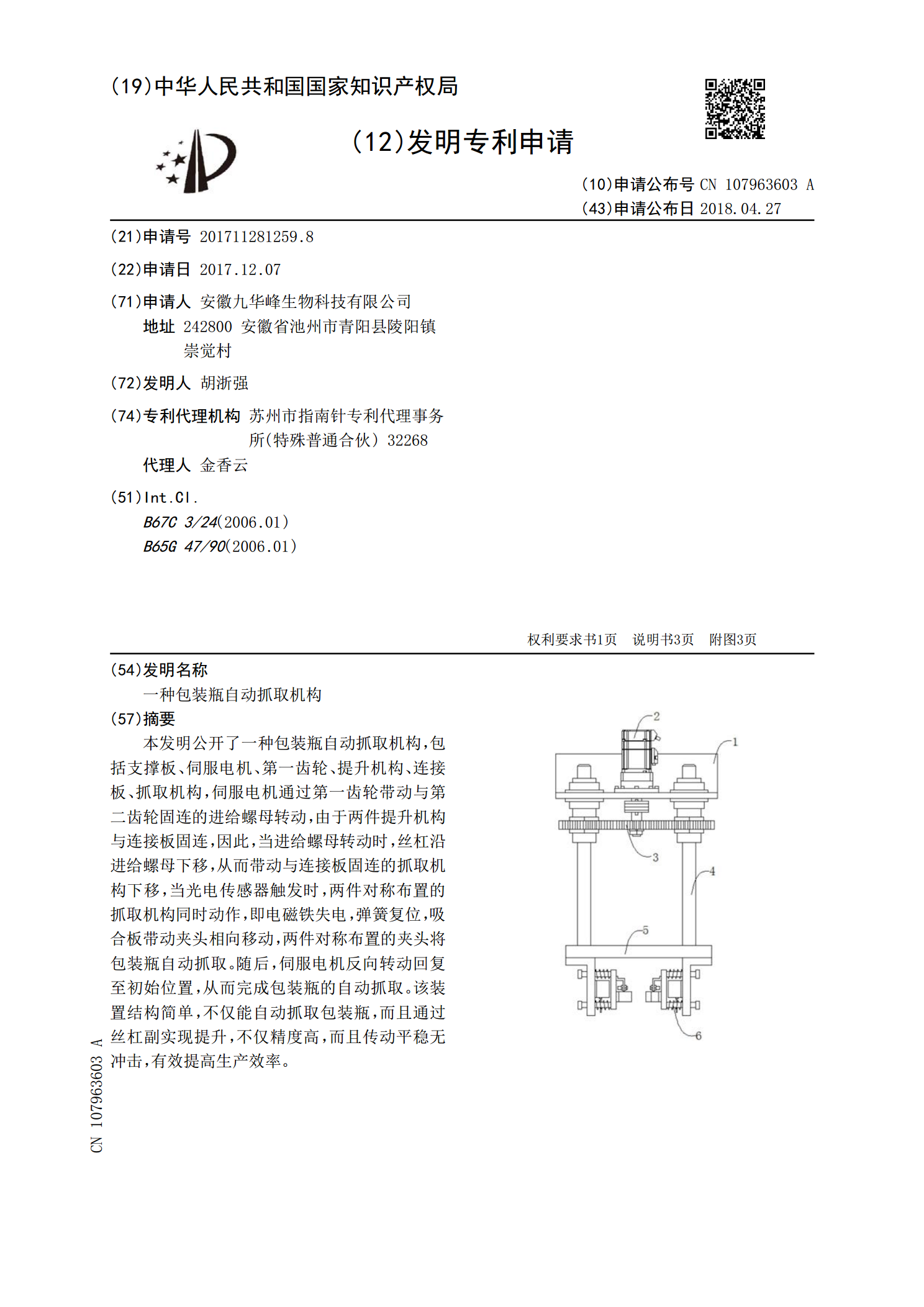
一种包装瓶自动抓取机构.pdf
本发明公开了一种包装瓶自动抓取机构,包括支撑板、伺服电机、第一齿轮、提升机构、连接板、抓取机构,伺服电机通过第一齿轮带动与第二齿轮固连的进给螺母转动,由于两件提升机构与连接板固连,因此,当进给螺母转动时,丝杠沿进给螺母下移,从而带动与连接板固连的抓取机构下移,当光电传感器触发时,两件对称布置的抓取机构同时动作,即电磁铁失电,弹簧复位,吸合板带动夹头相向移动,两件对称布置的夹头将包装瓶自动抓取。随后,伺服电机反向转动回复至初始位置,从而完成包装瓶的自动抓取。该装置结构简单,不仅能自动抓取包装瓶,而且通过丝杠