
一种水下小目标定位抓取装置及方法.pdf

萌运****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下小目标定位抓取装置及方法.pdf
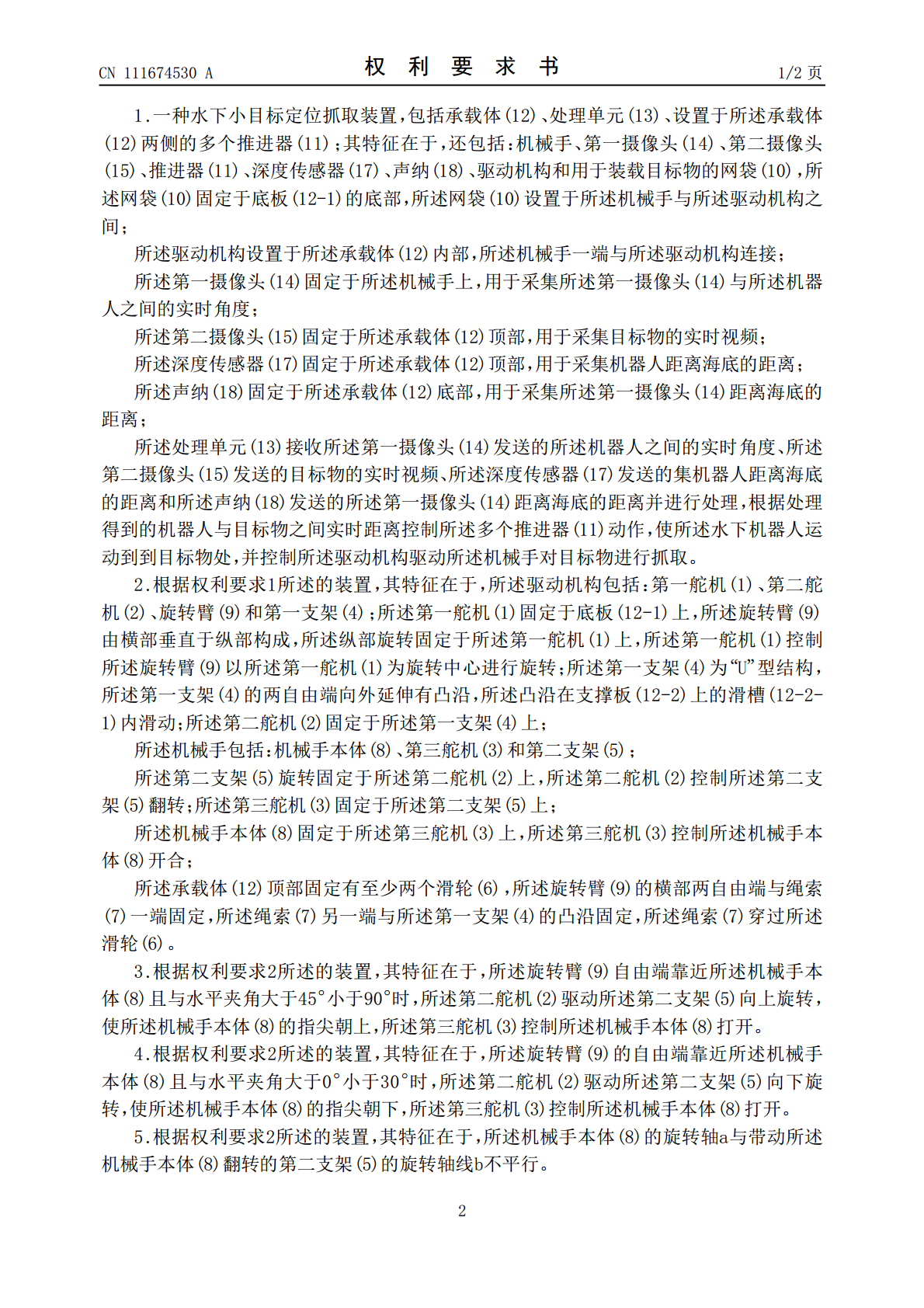
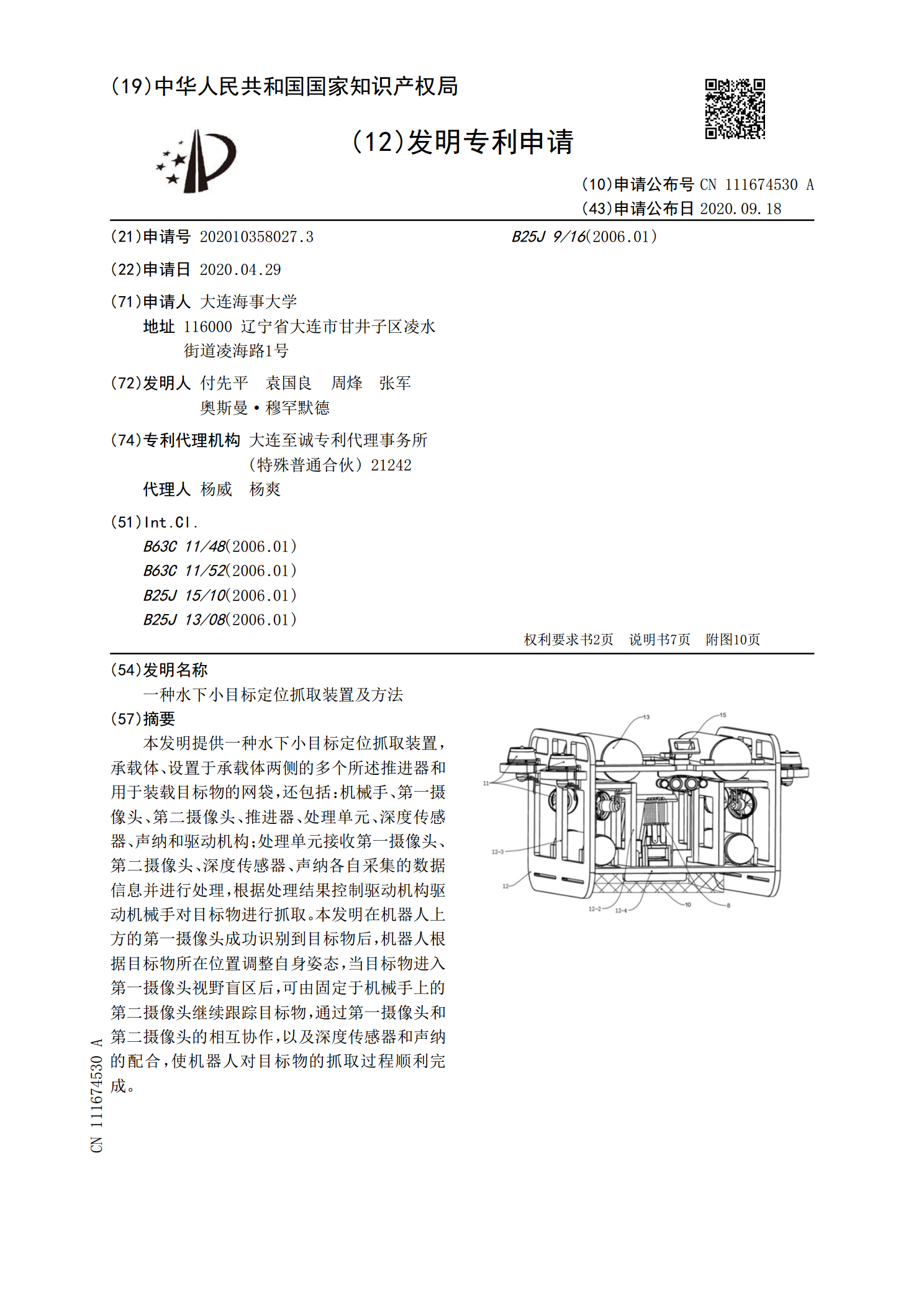
本发明提供一种水下小目标定位抓取装置,承载体、设置于承载体两侧的多个所述推进器和用于装载目标物的网袋,还包括:机械手、第一摄像头、第二摄像头、推进器、处理单元、深度传感器、声纳和驱动机构;处理单元接收第一摄像头、第二摄像头、深度传感器、声纳各自采集的数据信息并进行处理,根据处理结果控制驱动机构驱动机械手对目标物进行抓取。本发明在机器人上方的第一摄像头成功识别到目标物后,机器人根据目标物所在位置调整自身姿态,当目标物进入第一摄像头视野盲区后,可由固定于机械手上的第二摄像头继续跟踪目标物,通过第一摄像头和第二
水下抓取装置.pdf
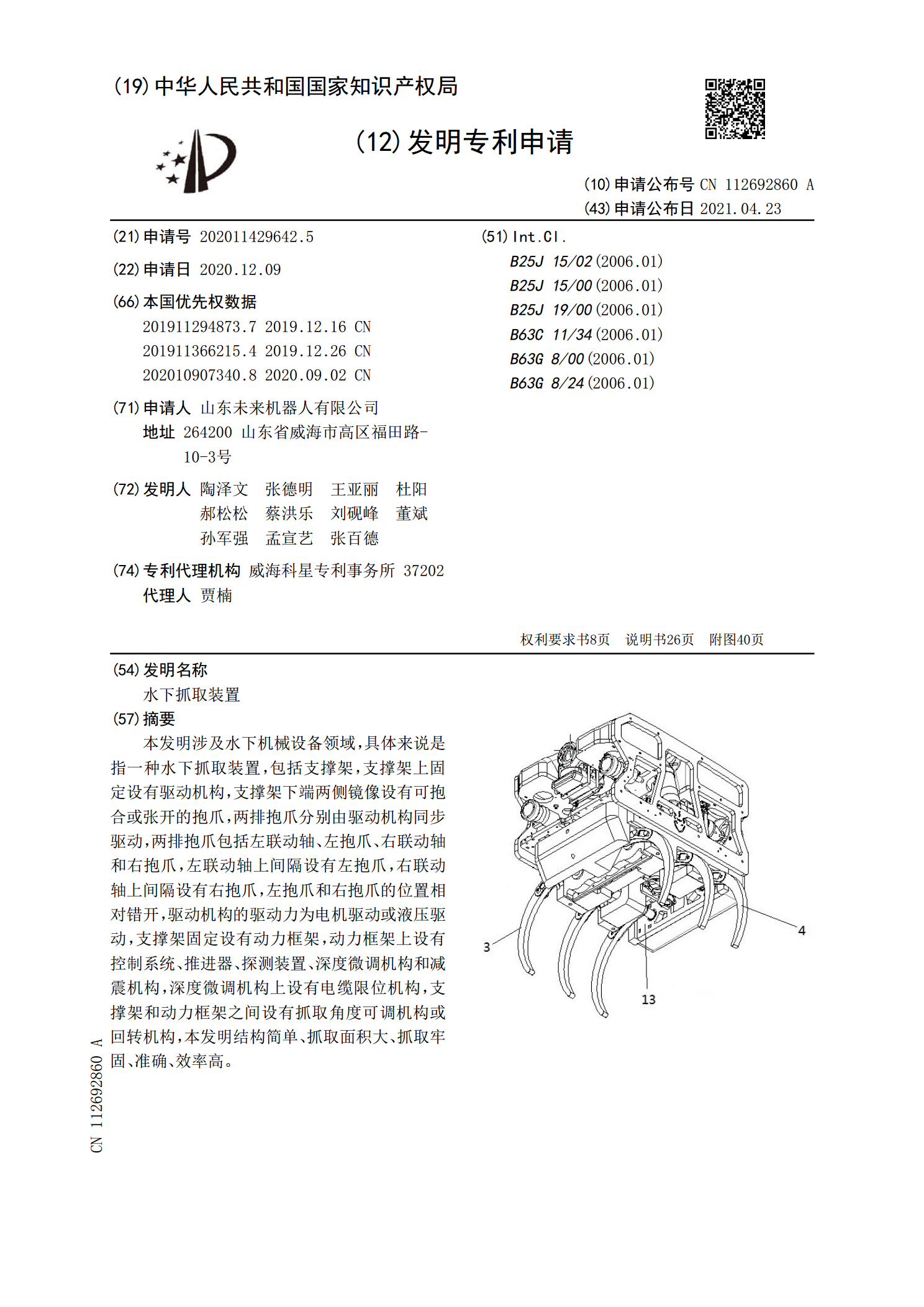
本发明涉及水下机械设备领域,具体来说是指一种水下抓取装置,包括支撑架,支撑架上固定设有驱动机构,支撑架下端两侧镜像设有可抱合或张开的抱爪,两排抱爪分别由驱动机构同步驱动,两排抱爪包括左联动轴、左抱爪、右联动轴和右抱爪,左联动轴上间隔设有左抱爪,右联动轴上间隔设有右抱爪,左抱爪和右抱爪的位置相对错开,驱动机构的驱动力为电机驱动或液压驱动,支撑架固定设有动力框架,动力框架上设有控制系统、推进器、探测装置、深度微调机构和减震机构,深度微调机构上设有电缆限位机构,支撑架和动力框架之间设有抓取角度可调机构或回转机构
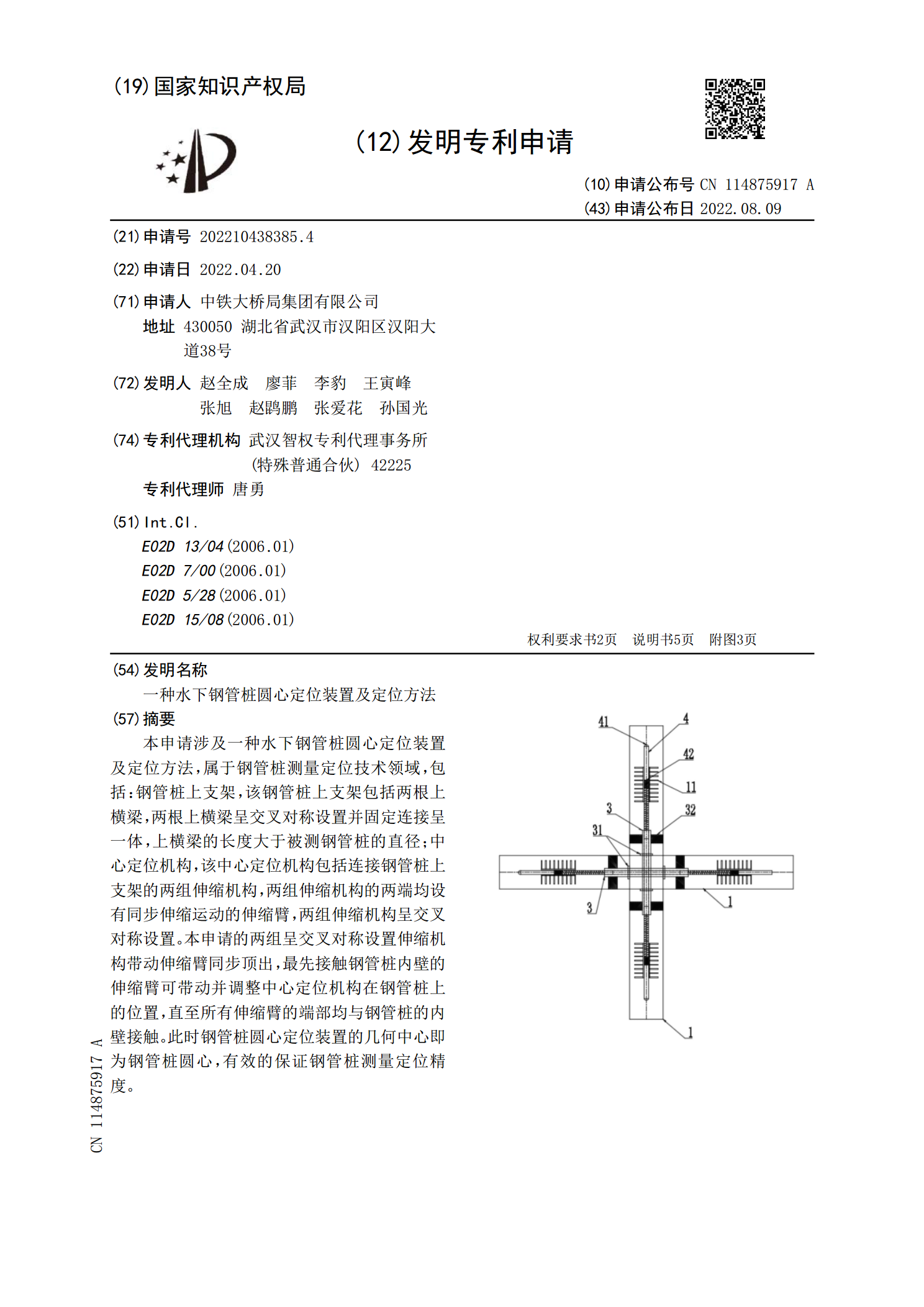
一种水下钢管桩圆心定位装置及定位方法.pdf
本申请涉及一种水下钢管桩圆心定位装置及定位方法,属于钢管桩测量定位技术领域,包括:钢管桩上支架,该钢管桩上支架包括两根上横梁,两根上横梁呈交叉对称设置并固定连接呈一体,上横梁的长度大于被测钢管桩的直径;中心定位机构,该中心定位机构包括连接钢管桩上支架的两组伸缩机构,两组伸缩机构的两端均设有同步伸缩运动的伸缩臂,两组伸缩机构呈交叉对称设置。本申请的两组呈交叉对称设置伸缩机构带动伸缩臂同步顶出,最先接触钢管桩内壁的伸缩臂可带动并调整中心定位机构在钢管桩上的位置,直至所有伸缩臂的端部均与钢管桩的内壁接触。此时钢

水下定位装置及定位方法.pdf
本发明提供了一种水下定位装置,包括超短基线收发器、测量船、GPS定位器(1)、应答器(5)以及海洋磁力仪(6);所述超短基线收发器设置在测量船的下方;所述GPS定位器(1)设置在测量船的上方;所述海洋磁力仪(6)通过应答器(5)及拖缆(7)与测量船相连接。本发明提供的水下定位装置及定位方法解决掩埋物的参数测量误差较大的问题。
一种水下光定位装置及方法.pdf
本发明公开了一种水下光定位装置及方法,包括定位装置主体,所述定位装置主体包括有装置外壳、防水的摄像头、激光收发器、光传感器,还包括有浮动座,浮动座和定位装置主体连接,浮动座上设置有插孔,插孔内设置有插柱,插柱和定位装置主体连接,插柱上设置有配重块,配重块内设置有密封的内腔,内腔内设置浮动块,浮动块悬浮在内腔内;插柱上固定有多个浮动件,浮动件上设置有储物腔。本发明操作简单,通过插柱将光定位装置放置在水中,进行光定位,操作简单,快捷;整个光定位装置能够得到有效保护,增加了防撞效果,整个装置不易损坏;整个装置在