
一种悬挂定位机械臂及控制方法.pdf

猫巷****熙柔

1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种悬挂定位机械臂及控制方法.pdf
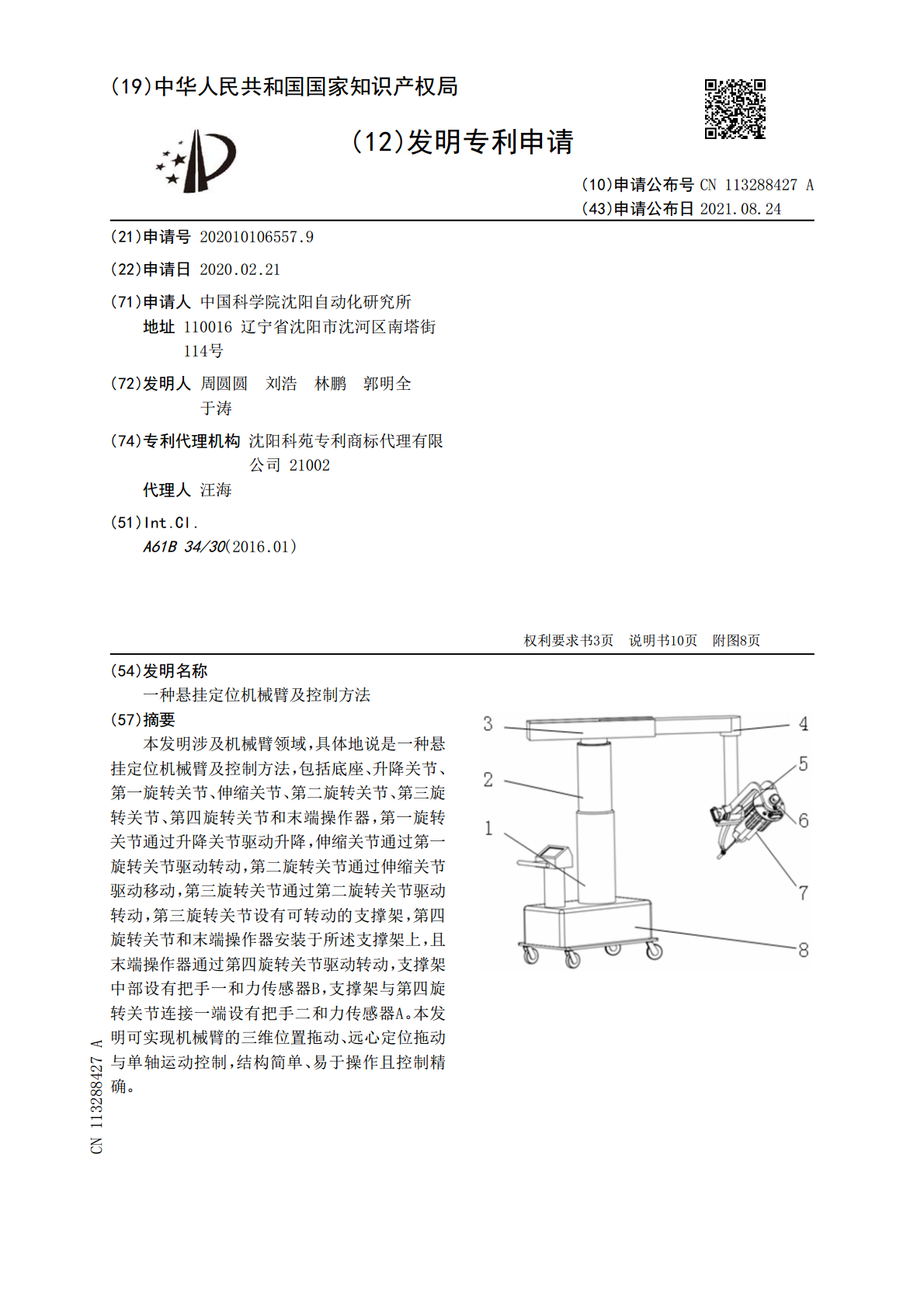
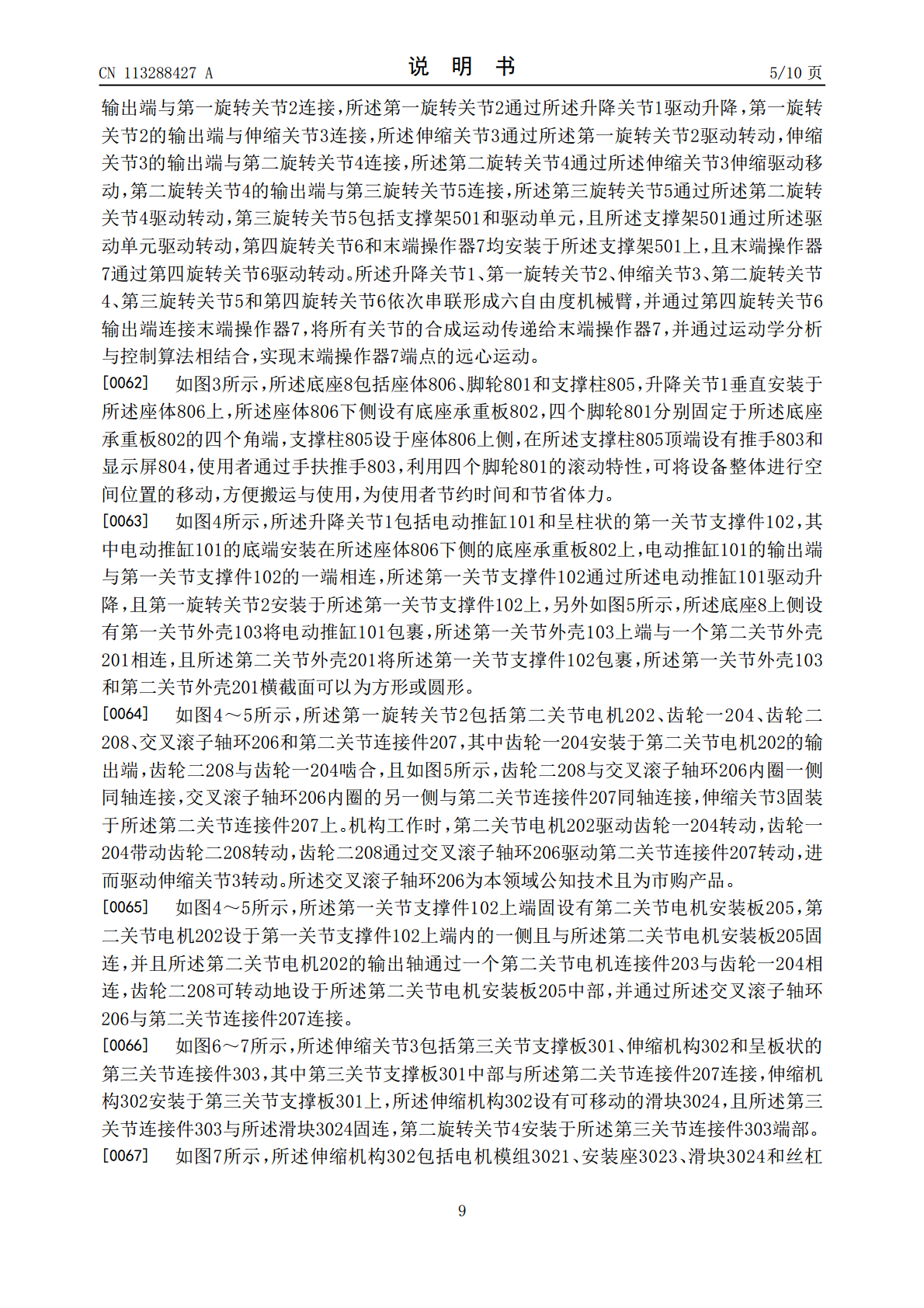
本发明涉及机械臂领域,具体地说是一种悬挂定位机械臂及控制方法,包括底座、升降关节、第一旋转关节、伸缩关节、第二旋转关节、第三旋转关节、第四旋转关节和末端操作器,第一旋转关节通过升降关节驱动升降,伸缩关节通过第一旋转关节驱动转动,第二旋转关节通过伸缩关节驱动移动,第三旋转关节通过第二旋转关节驱动转动,第三旋转关节设有可转动的支撑架,第四旋转关节和末端操作器安装于所述支撑架上,且末端操作器通过第四旋转关节驱动转动,支撑架中部设有把手一和力传感器B,支撑架与第四旋转关节连接一端设有把手二和力传感器A。本发明可实
一种悬挂式机械臂.pdf
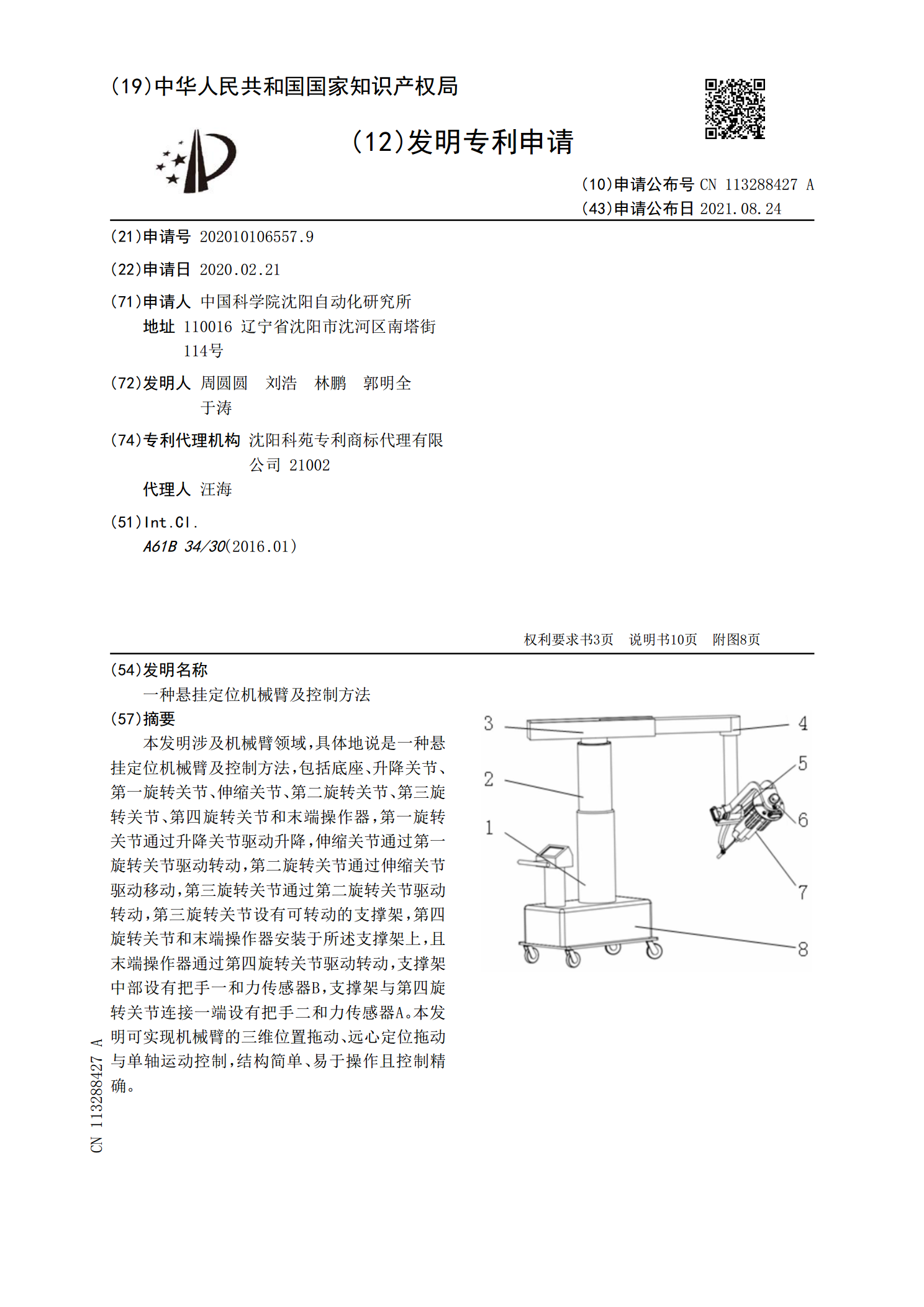
本实用新型公开了一种悬挂式机械臂,包括安装板、转动装置、第一调节臂、第二调节臂、焊接装置和遮光罩;本实用新型通过安装板来将整体结构吊接固定在外部环境中,通过转动装置来带动第一调节臂、第二调节臂、焊接装置和遮光罩进行转动,用以配合不同角度的焊接,通过第一调节臂和第二调节臂能够多角度的改变焊接装置的焊接角度,方便应对多种情况的焊接工作,通过焊接装置来进行焊接工作,通过遮光罩来遮挡焊接时产生强光。
一种机械臂控制方法、机械臂控制装置及终端设备.pdf
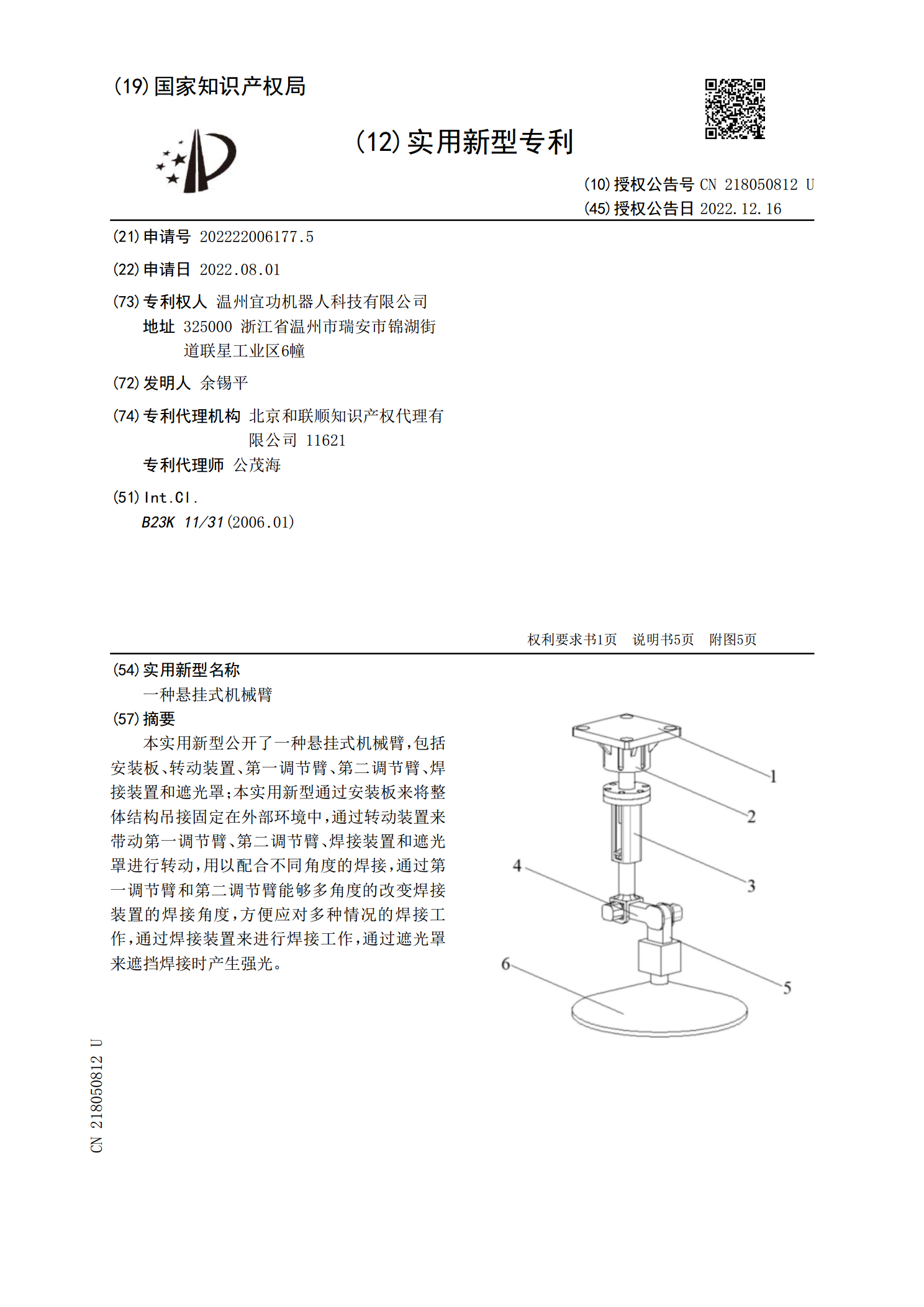
本发明适用于控制技术领域,提供了一种机械臂控制方法、机械臂控制装置及终端设备,所述机械臂控制方法,包括:通过体感设备实时获取用户的手臂相对于用户的躯干的第一相对位置信息,并实时获取所述用户的手部的状态信息;实时控制机械臂根据所述第一相对位置信息进行移动,并实时控制位于所述机械臂的端部的机械爪执行与所述状态信息相对应的操作。通过本发明,可以满足人们对体验高效的交互式活动,从而获得乐趣或者提高效率的需求。
一种基于视觉识别定位的机械臂导航方法.pdf
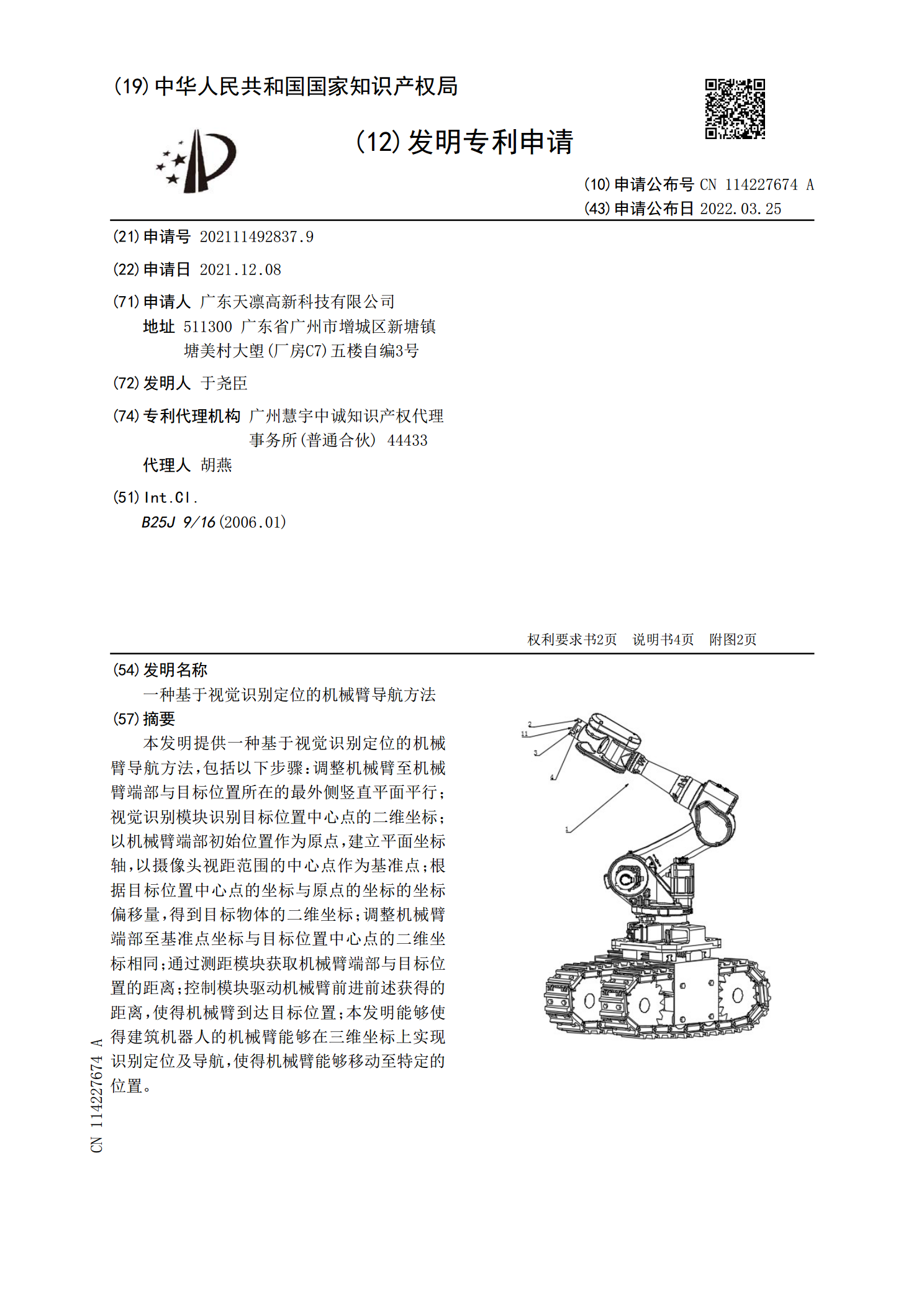
本发明提供一种基于视觉识别定位的机械臂导航方法,包括以下步骤:调整机械臂至机械臂端部与目标位置所在的最外侧竖直平面平行;视觉识别模块识别目标位置中心点的二维坐标;以机械臂端部初始位置作为原点,建立平面坐标轴,以摄像头视距范围的中心点作为基准点;根据目标位置中心点的坐标与原点的坐标的坐标偏移量,得到目标物体的二维坐标;调整机械臂端部至基准点坐标与目标位置中心点的二维坐标相同;通过测距模块获取机械臂端部与目标位置的距离;控制模块驱动机械臂前进前述获得的距离,使得机械臂到达目标位置;本发明能够使得建筑机器人的机

一种机械臂的控制方法及装置.pdf
本申请提供一种机械臂的控制方法及装置,其中,所述方法包括:获取动作原子的目标动作;根据所述动作原子的目标动作,调用所述目标动作对应的执行函数;获取所述动作原子参数的参数值;根据所述执行函数以及所述动作原子参数的参数值,生成至少一个控制参数;根据所述控制参数控制所述机械臂完成所述目标动作,从而允许用户根据动作原子实现对机械臂的控制,操作灵活,易于普通用户使用。