
一种基于视觉识别定位的机械臂导航方法.pdf

靖烟****魔王

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉识别定位的机械臂导航方法.pdf
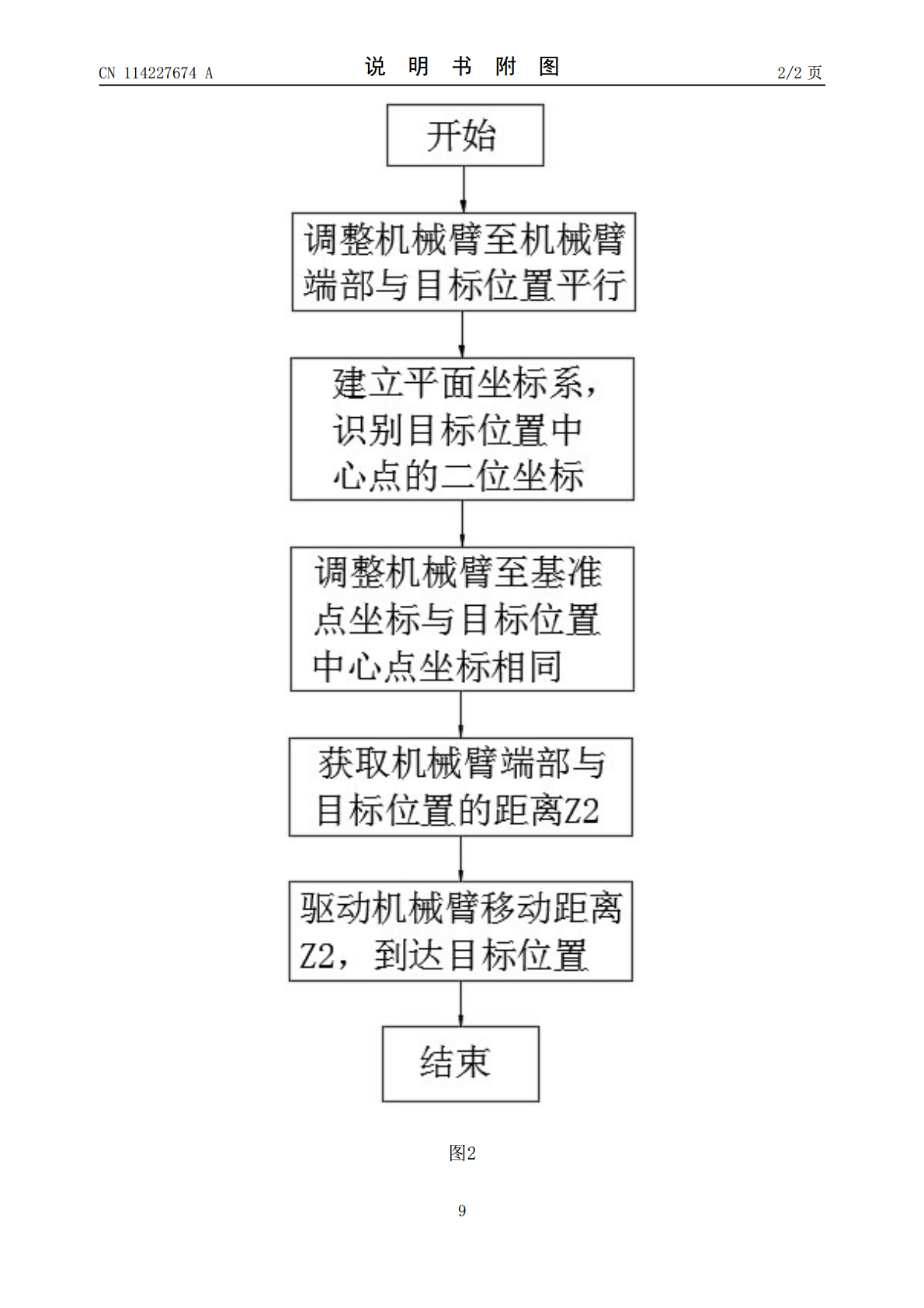
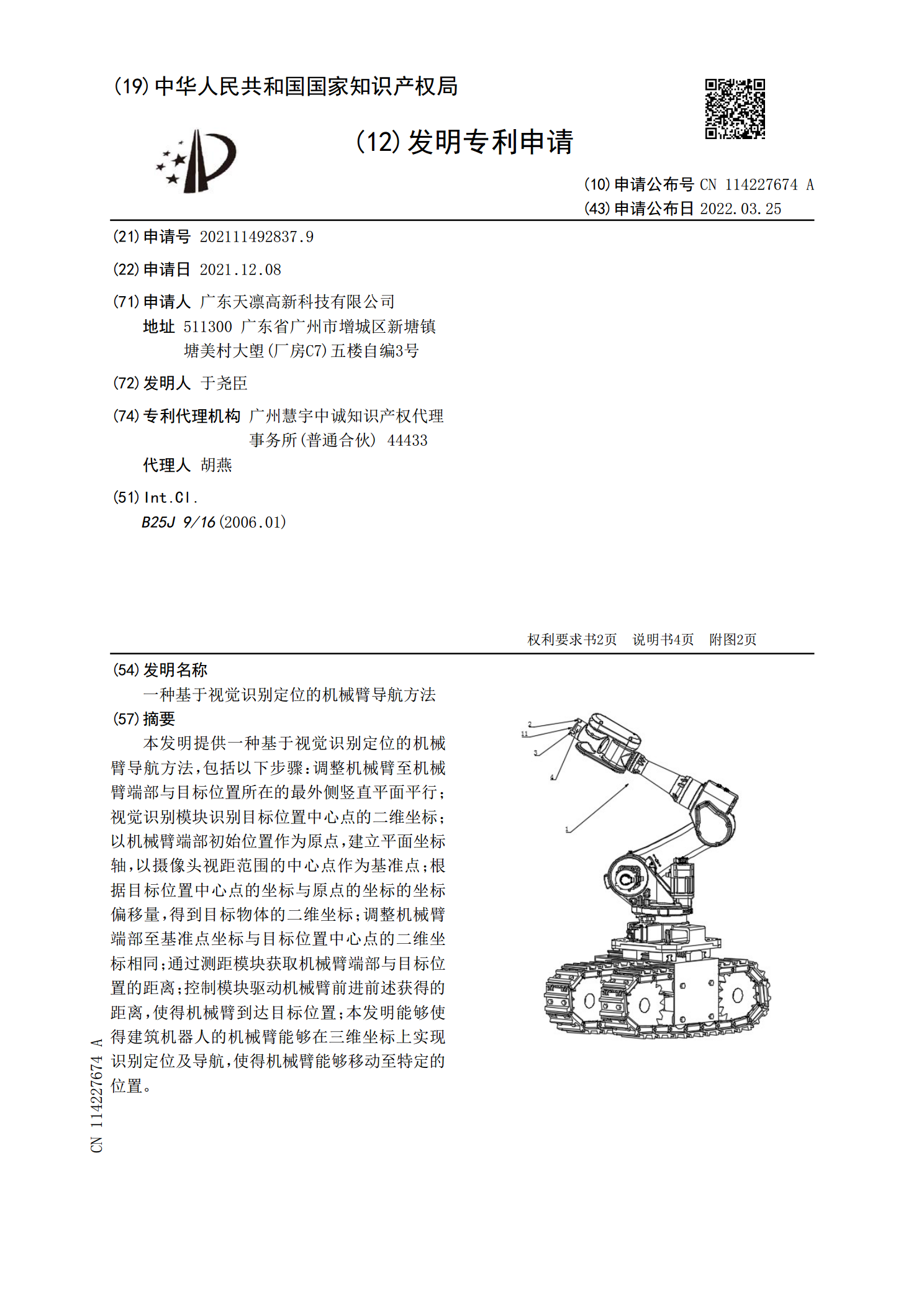
本发明提供一种基于视觉识别定位的机械臂导航方法,包括以下步骤:调整机械臂至机械臂端部与目标位置所在的最外侧竖直平面平行;视觉识别模块识别目标位置中心点的二维坐标;以机械臂端部初始位置作为原点,建立平面坐标轴,以摄像头视距范围的中心点作为基准点;根据目标位置中心点的坐标与原点的坐标的坐标偏移量,得到目标物体的二维坐标;调整机械臂端部至基准点坐标与目标位置中心点的二维坐标相同;通过测距模块获取机械臂端部与目标位置的距离;控制模块驱动机械臂前进前述获得的距离,使得机械臂到达目标位置;本发明能够使得建筑机器人的机

基于视觉的特种机械臂目标识别与定位.docx
基于视觉的特种机械臂目标识别与定位Title:Visual-basedObjectRecognitionandLocalizationforSpecializedRoboticArmsAbstract:Theabilitytorecognizeandaccuratelylocateobjectsiscrucialforspecializedroboticarmsinvariousindustrialandresearchapplications.Inthispaper,wepresentacomprehe
一种基于跟踪视觉识别算法的机械臂智能控制方法.pdf
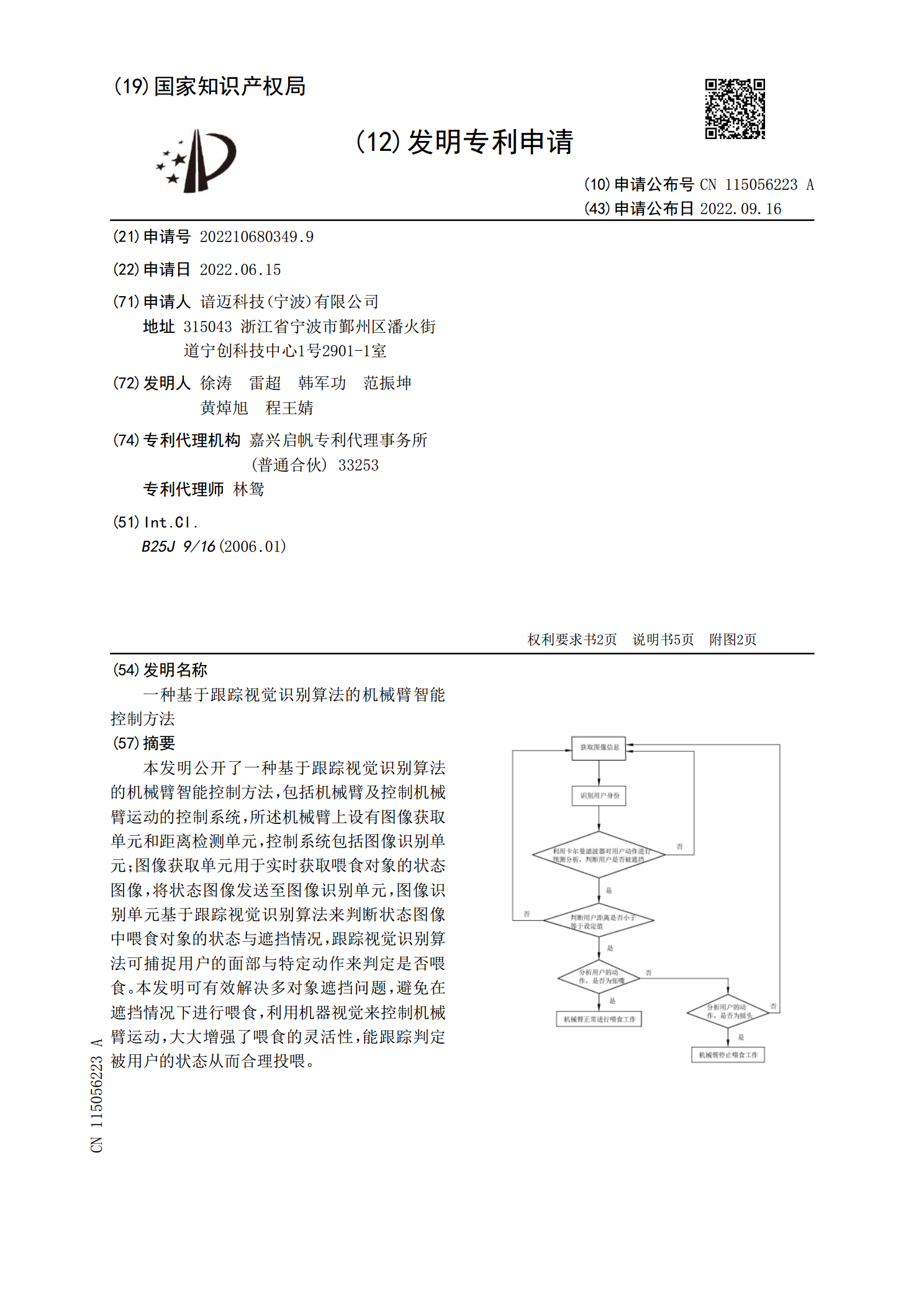
本发明公开了一种基于跟踪视觉识别算法的机械臂智能控制方法,包括机械臂及控制机械臂运动的控制系统,所述机械臂上设有图像获取单元和距离检测单元,控制系统包括图像识别单元;图像获取单元用于实时获取喂食对象的状态图像,将状态图像发送至图像识别单元,图像识别单元基于跟踪视觉识别算法来判断状态图像中喂食对象的状态与遮挡情况,跟踪视觉识别算法可捕捉用户的面部与特定动作来判定是否喂食。本发明可有效解决多对象遮挡问题,避免在遮挡情况下进行喂食,利用机器视觉来控制机械臂运动,大大增强了喂食的灵活性,能跟踪判定被用户的状态从而
一种基于视觉识别实现机械臂精准挑拣的方法及系统.pdf
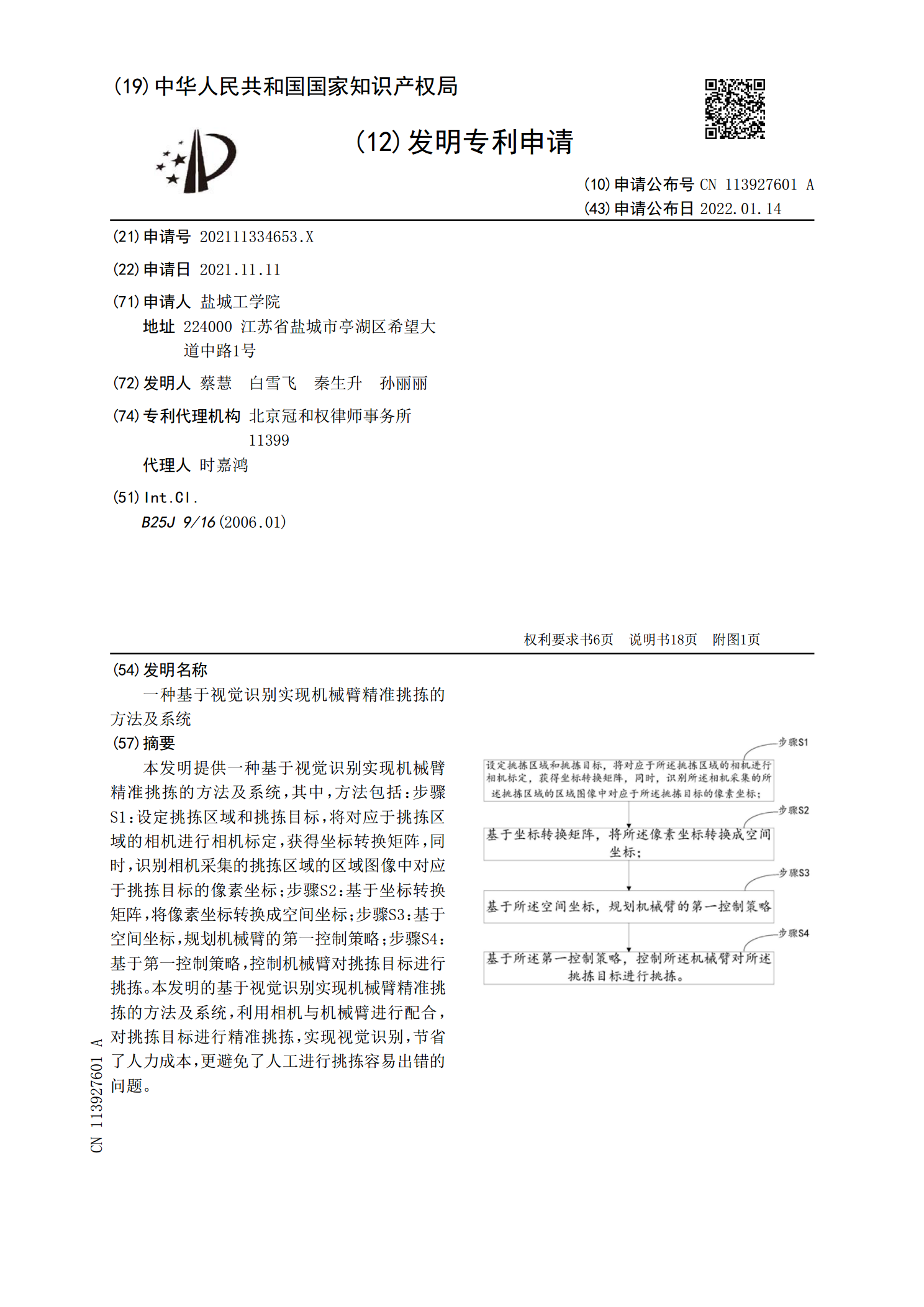
本发明提供一种基于视觉识别实现机械臂精准挑拣的方法及系统,其中,方法包括:步骤S1:设定挑拣区域和挑拣目标,将对应于挑拣区域的相机进行相机标定,获得坐标转换矩阵,同时,识别相机采集的挑拣区域的区域图像中对应于挑拣目标的像素坐标;步骤S2:基于坐标转换矩阵,将像素坐标转换成空间坐标;步骤S3:基于空间坐标,规划机械臂的第一控制策略;步骤S4:基于第一控制策略,控制机械臂对挑拣目标进行挑拣。本发明的基于视觉识别实现机械臂精准挑拣的方法及系统,利用相机与机械臂进行配合,对挑拣目标进行精准挑拣,实现视觉识别,节省
一种基于双深度相机识别定位的机械臂抓取方法.pdf
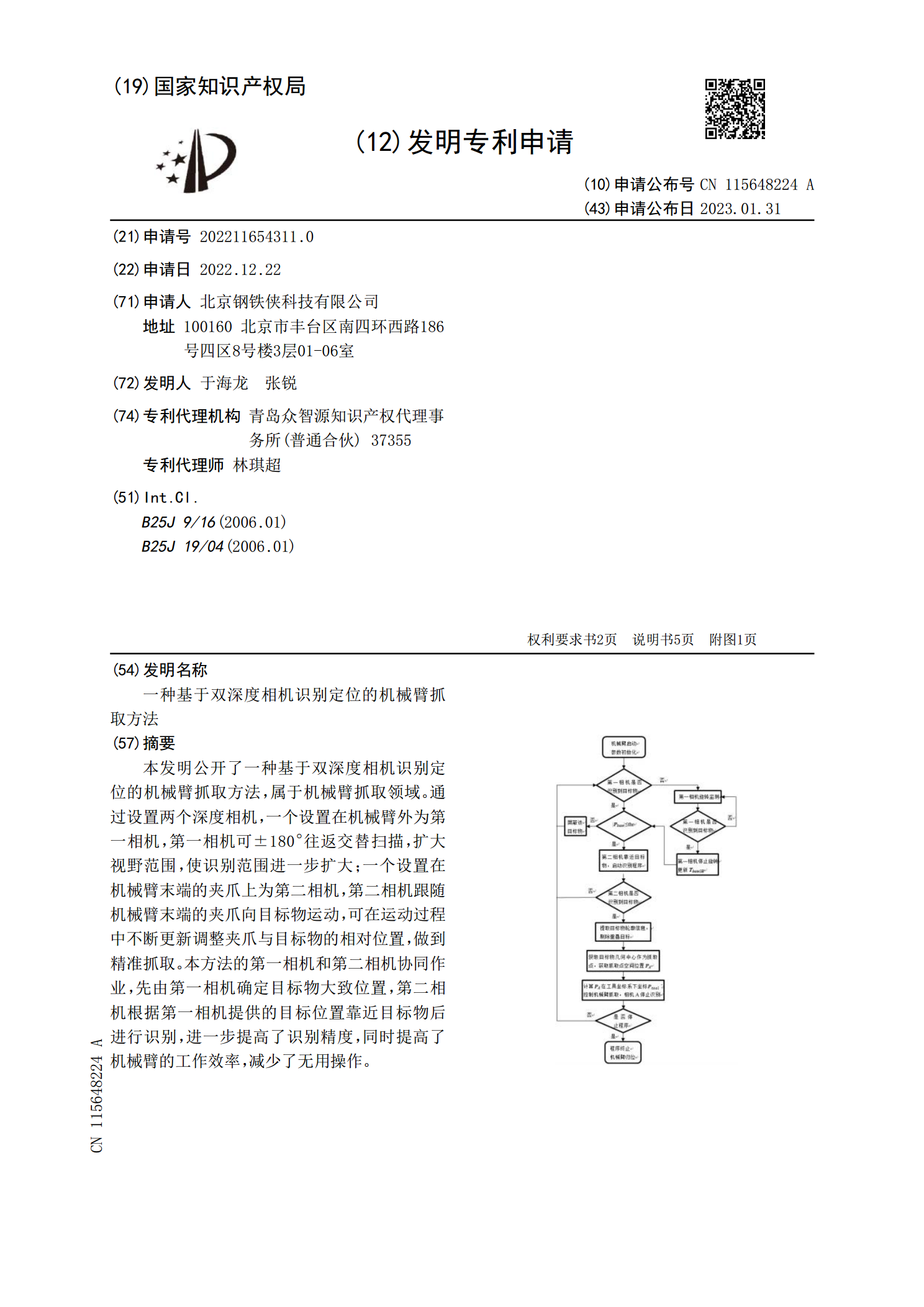
本发明公开了一种基于双深度相机识别定位的机械臂抓取方法,属于机械臂抓取领域。通过设置两个深度相机,一个设置在机械臂外为第一相机,第一相机可±180°往返交替扫描,扩大视野范围,使识别范围进一步扩大;一个设置在机械臂末端的夹爪上为第二相机,第二相机跟随机械臂末端的夹爪向目标物运动,可在运动过程中不断更新调整夹爪与目标物的相对位置,做到精准抓取。本方法的第一相机和第二相机协同作业,先由第一相机确定目标物大致位置,第二相机根据第一相机提供的目标位置靠近目标物后进行识别,进一步提高了识别精度,同时提高了机械臂的工